
Guten Morgen Zusammen,
nachdem auf RCGroups der Fixhawk von RCTimer vorgestellt wurde, konnte ich nicht länger widerstehen. Auch wenn es derzeit ja abgesehen von kleineren Dingen und dem EKF kaum unterschiede gibt, brachte mich die Neugierde dazu, einen Fixhawk von RCTimer zu bestellen.
Ohne zu Wissen, dass es hier im Forum einen Thread gibt, der vor DHL Express warnt, habe ich schön für 20$ Aufschlag per DHL Express bestellt letzten Freitag und gestern Lag das Päckchen dann bei der Nachbarin. 4 Werktage also, wie angegeben.
Zum eigentlich interessanten, dem Inhalt:

Neben diversen Kabeln lag in dem unscheinbaren Karton neben dem Fixhawk, ein SD-Karten-Adapter, ein flacher, lauter Buzzer, der Saftey-Switch, ein Servo-Kabel und das Power Module.
Der Spaß fing allerdings direkt damit an, dass keiner der Stecker richtig in die Buchsen auf dem Fixhawk passte:

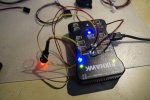
Die Nasen seitlich an den Steckern waren durchgehend über die gesamte stecktiefe des Steckers, die Buchsen sahen jedoch nur ca 1mm tiefe Führungen für die Nasen vor. Ein Problem, was sich leicht beheben lies. Ich habe mir einer scharfen Klinge die Nasen gekürzt, anschließend liessen sich die Stecker wie in dem Video im Pixhawk Wiki erklärt einstecken.
Das Fixhawk lief auf Anhieb, die mitgelieferte Version war Arducopter 3.1.5, also die aktuelle Stable. Ich frage mich allerdings, was sich die Entwickler bei den Buzzer-Tonen gedacht habe. Allein die Boot-Sequenz (Melodie) ist echt schrecklich. Spätestens dann, wenn man das 3. oder 4. mal das Board startet, bekommt man Ohrenbluten gefühlt. Wenn da nicht noch irgendein Vorteil erscheint, dass man den Buzzer per Schalter einen Alarm geben lassen kann im Falle eines Absturzes, oder das sogar automatisch im Failsafe ausgelöst wird, werd ich das Ding zukleben oder zumindest erst dann anstecken, wenns auf die Wiese geht. So nervt es nur.
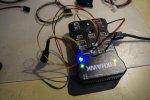
Anschließend hab ich das Fixhawk auf dem Vibration-Mount montiert, der eigentlich für das APM vorgesehen ist:


Passt gut darauf mit Spiegeltape. Wenn die Stecker ordentlich oben im Fixhawk stecken, ist auch genug platz noch vorhanden, so dass keine Berührung mit der oberen Rahmenabdeckung entsteht, die dann Vibrationen überträgt. Nicht wundern, zwischen den Vibration-Mount Platten ist der Controller vom Gimbal platziert.
Die Komponenten wie Telemetrie und GPS ließen sich einfach auf das neue Pin-Layout des Fixhawk stecken, lediglich der Kompass erwartet 3,3V, während das Fixhawk im Unterschied zum APM 5V am I2C liefert. Somit ist aktuell nur der interne Kompass aktiv.
Heute Abend geht es dann weiter, ich bin gespannt was ich noch so finde. Neu ist derzeit beispielsweise auch die Fehlermeldung "Bad Terrain " oder so ähnlich im HUD.
Abgesehen von den Steckern also bislang das was ich gesucht habe. Bekanntes Terrain in neuem Gewand ;-)
Die Verarbeitung vom Fixhawk ist ansonsten wirklich gut. Auch die Platine macht einen guten Eindruck. Die Lötstellen sind sauber alles sieht sehr ordentlich aus.
Viele Grüße,
Jacob
Edit:
Im Anhang noch ein paar Bilder vom Fixhawk.
nachdem auf RCGroups der Fixhawk von RCTimer vorgestellt wurde, konnte ich nicht länger widerstehen. Auch wenn es derzeit ja abgesehen von kleineren Dingen und dem EKF kaum unterschiede gibt, brachte mich die Neugierde dazu, einen Fixhawk von RCTimer zu bestellen.
Ohne zu Wissen, dass es hier im Forum einen Thread gibt, der vor DHL Express warnt, habe ich schön für 20$ Aufschlag per DHL Express bestellt letzten Freitag und gestern Lag das Päckchen dann bei der Nachbarin. 4 Werktage also, wie angegeben.
Zum eigentlich interessanten, dem Inhalt:
Neben diversen Kabeln lag in dem unscheinbaren Karton neben dem Fixhawk, ein SD-Karten-Adapter, ein flacher, lauter Buzzer, der Saftey-Switch, ein Servo-Kabel und das Power Module.
Der Spaß fing allerdings direkt damit an, dass keiner der Stecker richtig in die Buchsen auf dem Fixhawk passte:
Die Nasen seitlich an den Steckern waren durchgehend über die gesamte stecktiefe des Steckers, die Buchsen sahen jedoch nur ca 1mm tiefe Führungen für die Nasen vor. Ein Problem, was sich leicht beheben lies. Ich habe mir einer scharfen Klinge die Nasen gekürzt, anschließend liessen sich die Stecker wie in dem Video im Pixhawk Wiki erklärt einstecken.
Das Fixhawk lief auf Anhieb, die mitgelieferte Version war Arducopter 3.1.5, also die aktuelle Stable. Ich frage mich allerdings, was sich die Entwickler bei den Buzzer-Tonen gedacht habe. Allein die Boot-Sequenz (Melodie) ist echt schrecklich. Spätestens dann, wenn man das 3. oder 4. mal das Board startet, bekommt man Ohrenbluten gefühlt. Wenn da nicht noch irgendein Vorteil erscheint, dass man den Buzzer per Schalter einen Alarm geben lassen kann im Falle eines Absturzes, oder das sogar automatisch im Failsafe ausgelöst wird, werd ich das Ding zukleben oder zumindest erst dann anstecken, wenns auf die Wiese geht. So nervt es nur.
Anschließend hab ich das Fixhawk auf dem Vibration-Mount montiert, der eigentlich für das APM vorgesehen ist:
Passt gut darauf mit Spiegeltape. Wenn die Stecker ordentlich oben im Fixhawk stecken, ist auch genug platz noch vorhanden, so dass keine Berührung mit der oberen Rahmenabdeckung entsteht, die dann Vibrationen überträgt. Nicht wundern, zwischen den Vibration-Mount Platten ist der Controller vom Gimbal platziert.
Die Komponenten wie Telemetrie und GPS ließen sich einfach auf das neue Pin-Layout des Fixhawk stecken, lediglich der Kompass erwartet 3,3V, während das Fixhawk im Unterschied zum APM 5V am I2C liefert. Somit ist aktuell nur der interne Kompass aktiv.
Heute Abend geht es dann weiter, ich bin gespannt was ich noch so finde. Neu ist derzeit beispielsweise auch die Fehlermeldung "Bad Terrain " oder so ähnlich im HUD.
Abgesehen von den Steckern also bislang das was ich gesucht habe. Bekanntes Terrain in neuem Gewand ;-)
Die Verarbeitung vom Fixhawk ist ansonsten wirklich gut. Auch die Platine macht einen guten Eindruck. Die Lötstellen sind sauber alles sieht sehr ordentlich aus.
Viele Grüße,
Jacob
Edit:
Im Anhang noch ein paar Bilder vom Fixhawk.
Anhänge
-
 953,1 KB Aufrufe: 58
953,1 KB Aufrufe: 58 -
 881,1 KB Aufrufe: 49
881,1 KB Aufrufe: 49 -
 1.017,2 KB Aufrufe: 47
1.017,2 KB Aufrufe: 47 -
 1 MB Aufrufe: 50
1 MB Aufrufe: 50 -
 992,8 KB Aufrufe: 55
992,8 KB Aufrufe: 55



")







