
Hi Leute,
nachdem ich wichtigere Sachen im Leben abgeschlossen hab und endlich wieder Zeit hab nicht nur DJI Cam´s zu fliegen..
...wobei ich die AIR2s durchaus geniesse") ....
....
hab ich mich mal an einen Umbau gemacht.
Ausgang war ein AIR2 Gehäuse. Das Mainboard war defekt, Ersatzteile zu teuer....eine Rep. in der Werkstatt sinnlos.
Also hab ich das Teil auseinandergepflückt, einige Teile verkauft und der Rest schien mir zu schade um in den Müll zu wandern.


Ziel: ne Freestyle mit Klapparmen, Invest so klein wie möglich (ich lerne das Fliegen ohne Automatik noch)
Vorhanden: 6 Akkus, Gehäuse, zig Propeller
Bestellt: SpeedyBee 403Mini 45A-Stack, Walksnail 181 GPS, Walksnail Avatar Mini 1s HD, Happy Elrs RX
Auf gehts ....passt das alles ?

Esc Board zersägt um an den Akkuanschluss zu kommen (ganz rechts). Mit Heißkleber fixiert....passt.

Die Pfostenleiste sitzt fest auf ner Platine. Auch wenn sie etwas verschoben ist...die Akkus lassen da jede Menge Spielraum.

das passt erschrenkend gut. Der USB-C Anschluss lässt sich supi vors vorhandene Loch possitionieren.
Die Stromversorgung 4,5V für den WS VTX hat nen Schalter bekommen...wir wissen alle wie schnell die Dinger zu heiß werden.

Die DJi Teile haben die RX und VTX-Antennen in den vorderen Beinen. Wäre natürlich total geil wenn man die nutzen könnte !
Keine extra Antenne nach aussen führen, sauberer gehts nicht. Probieren ist zu dem zeitpunkt nicht easy. Klar funkt der ELRS-Receiver auch ohne...ebenso funzt der VTX aufm Tisch....aber wie siehts mit den Antennen wirklich aus ??
Nach recht kurzer Unterhaltung hier und dem Angebot vom @Michael-Mo die Teile mal zu messen....dankööööö....
kommt das raus:

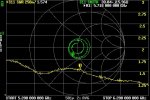

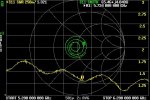
Will heißen...die Antennen intern sind für beide Bereiche, 2,4 und 5,8 Ghz nutzbar. Wie geil is das denn !?
Also weiter. Klar soll´s auch a bissel blitzen und Löcher der vorherigen Sensoren gibts genug...

Schön das INAV (oder BetaF) hier nicht nur rumgeblinke unterstützt, sondern auch wichtige Meldungen per LED.
So sitzen unterm vorderen deckel nicht nur GPS sondern auch 4 2812er LEd die 3D-Fix, RSI-Level, ArmStatus und Akkustand anzeigen. Hinten einmal rot blinkend, vorn zweimal grün blinkend...
Über Funke lassen sich alle Led ausschalten.


Da sich die Elektronik auf zwei Schalen verteilen sind einige Verbindungen steckbar ausgeführt. ...Motorkabel, VTX, LED
Der VTX hat noch einen kl Kühler spendiert bekommen...der aber allein im Stand auch nix hilft. Die Runcam sitzt auf ner gefederten Platte vom DJI-Gimbal und ist an ner ALU halterung bestestigt sodass ich weder Gehäuse noch Propeller im Bild hab.


Geflogen werden soll das Teil mit ner Rocid Max Brille. Damit hab ich mit der AIR2s schon total Spaß ! Den Umbau um die Rocid am WS VRX zu betreiben zeig ich später
So...Schätzelein fliegt, wenn auch extrem unruhig. PID Tuning muss ich mich einlesen und dann heisst es wohl üben , üben, üben

nachdem ich wichtigere Sachen im Leben abgeschlossen hab und endlich wieder Zeit hab nicht nur DJI Cam´s zu fliegen..
...wobei ich die AIR2s durchaus geniesse
....hab ich mich mal an einen Umbau gemacht.
Ausgang war ein AIR2 Gehäuse. Das Mainboard war defekt, Ersatzteile zu teuer....eine Rep. in der Werkstatt sinnlos.
Also hab ich das Teil auseinandergepflückt, einige Teile verkauft und der Rest schien mir zu schade um in den Müll zu wandern.
Ziel: ne Freestyle mit Klapparmen, Invest so klein wie möglich (ich lerne das Fliegen ohne Automatik noch
)Vorhanden: 6 Akkus, Gehäuse, zig Propeller
Bestellt: SpeedyBee 403Mini 45A-Stack, Walksnail 181 GPS, Walksnail Avatar Mini 1s HD, Happy Elrs RX
Auf gehts ....passt das alles ?
Esc Board zersägt um an den Akkuanschluss zu kommen (ganz rechts). Mit Heißkleber fixiert....passt.
Die Pfostenleiste sitzt fest auf ner Platine. Auch wenn sie etwas verschoben ist...die Akkus lassen da jede Menge Spielraum.
das passt erschrenkend gut. Der USB-C Anschluss lässt sich supi vors vorhandene Loch possitionieren.
Die Stromversorgung 4,5V für den WS VTX hat nen Schalter bekommen...wir wissen alle wie schnell die Dinger zu heiß werden.
Die DJi Teile haben die RX und VTX-Antennen in den vorderen Beinen. Wäre natürlich total geil wenn man die nutzen könnte !
Keine extra Antenne nach aussen führen, sauberer gehts nicht. Probieren ist zu dem zeitpunkt nicht easy. Klar funkt der ELRS-Receiver auch ohne...ebenso funzt der VTX aufm Tisch....aber wie siehts mit den Antennen wirklich aus ??
Nach recht kurzer Unterhaltung hier und dem Angebot vom @Michael-Mo die Teile mal zu messen....dankööööö....
kommt das raus:
Will heißen...die Antennen intern sind für beide Bereiche, 2,4 und 5,8 Ghz nutzbar. Wie geil is das denn !?
Also weiter. Klar soll´s auch a bissel blitzen und Löcher der vorherigen Sensoren gibts genug...
Schön das INAV (oder BetaF) hier nicht nur rumgeblinke unterstützt, sondern auch wichtige Meldungen per LED.
So sitzen unterm vorderen deckel nicht nur GPS sondern auch 4 2812er LEd die 3D-Fix, RSI-Level, ArmStatus und Akkustand anzeigen. Hinten einmal rot blinkend, vorn zweimal grün blinkend...
Über Funke lassen sich alle Led ausschalten.
Da sich die Elektronik auf zwei Schalen verteilen sind einige Verbindungen steckbar ausgeführt. ...Motorkabel, VTX, LED
Der VTX hat noch einen kl Kühler spendiert bekommen...der aber allein im Stand auch nix hilft. Die Runcam sitzt auf ner gefederten Platte vom DJI-Gimbal und ist an ner ALU halterung bestestigt sodass ich weder Gehäuse noch Propeller im Bild hab.
Geflogen werden soll das Teil mit ner Rocid Max Brille. Damit hab ich mit der AIR2s schon total Spaß ! Den Umbau um die Rocid am WS VRX zu betreiben zeig ich später
So...Schätzelein fliegt, wenn auch extrem unruhig. PID Tuning muss ich mich einlesen und dann heisst es wohl üben , üben, üben
Anhänge
-
 184,1 KB Aufrufe: 16
184,1 KB Aufrufe: 16
Zuletzt bearbeitet:


