
Quadrocopter Eigenentwicklung
- Themenstarter Vampire
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
ich liebe es, wenn solche Projekte realisiert werden! Ich verstehe auch die Motivation dahinter und freue mich über jede, so gewonnene Erkenntnis (auch aus zweiter Hand), wenn man etwas selbst macht. Auch wenns das schon gibt. Denn wenn man aus den Fehlern dabei lernt, versteht man, warum die Dinge so funktionieren, und nicht anders. Und dann kann man beim Optimieren gleich in die richtige Richtung marschieren. Und diese Doku gibts eben bei gekauften Dingen nicht.
Ganz klares Abo! Danke, dass Du Dir die Mühe machst, alles so fein niederzuschreiben")
Ganz klares Abo! Danke, dass Du Dir die Mühe machst, alles so fein niederzuschreiben
Schaltplan für erste Flight-Control fertig
Hallo!
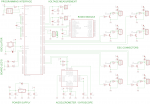
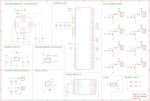
Da der Copter in einfacher Version soweit funktioniert möchte ich nun eine erste Flight Control in SMD Technik aufbauen. Dazu habe ich zunächst einen Schaltplan gemacht, den Ihr auf dem Bild sehen könnt. Diese erste Flight Control unterstützt folgende Funktionen:
* Tri-, Quad-, Hexa- und Octocopter (SW Anpassungen sind natürlich entsprechend noch erforderlich)
* Zwei Spannungsmessungen (1 x Haupt-AKKU und 1 x Zusatz-AKKU)
* Redundante Spannungsversorgung über alle angeschlossenen BEC´s (Schottky Dioden). Fällt ein BEC aus, bleibt die FC funktionstüchtig.
* MPU6050 Accelerometer / Gyroscope
* Funkmodul DNT24P für die digitale Datenkommunikation (Steuerbefehle und Messdatenübertragung)
* PDI Programmierschnittstelle im Atmel-Format (Hierüber kann die Software aufgespielt werden)
* Zwei Board LED´s
* 1 x Spannungsversorgungsanschluss für Beleuchtung (3,3V bis 500mA sowie Signalleitung für analoge Helligkeitssteuerung über PWM Signal).
An dem dazugehörigen Layout bin ich gerade dran. Die Platine wird 4,2cm x 4,2cm groß werden. Ich werde das Teil VAMP FC-A V1.0 nennen. Dabei steht das A für die erste Variante, die von mir stammt. Weitere Varianten mit weiteren Sensoren usw. werden dann im Alphabet fortschreitend benannt.
Gruß, Markus
Hallo!
Da der Copter in einfacher Version soweit funktioniert möchte ich nun eine erste Flight Control in SMD Technik aufbauen. Dazu habe ich zunächst einen Schaltplan gemacht, den Ihr auf dem Bild sehen könnt. Diese erste Flight Control unterstützt folgende Funktionen:
* Tri-, Quad-, Hexa- und Octocopter (SW Anpassungen sind natürlich entsprechend noch erforderlich)
* Zwei Spannungsmessungen (1 x Haupt-AKKU und 1 x Zusatz-AKKU)
* Redundante Spannungsversorgung über alle angeschlossenen BEC´s (Schottky Dioden). Fällt ein BEC aus, bleibt die FC funktionstüchtig.
* MPU6050 Accelerometer / Gyroscope
* Funkmodul DNT24P für die digitale Datenkommunikation (Steuerbefehle und Messdatenübertragung)
* PDI Programmierschnittstelle im Atmel-Format (Hierüber kann die Software aufgespielt werden)
* Zwei Board LED´s
* 1 x Spannungsversorgungsanschluss für Beleuchtung (3,3V bis 500mA sowie Signalleitung für analoge Helligkeitssteuerung über PWM Signal).
An dem dazugehörigen Layout bin ich gerade dran. Die Platine wird 4,2cm x 4,2cm groß werden. Ich werde das Teil VAMP FC-A V1.0 nennen. Dabei steht das A für die erste Variante, die von mir stammt. Weitere Varianten mit weiteren Sensoren usw. werden dann im Alphabet fortschreitend benannt.
Gruß, Markus
Anhänge
-
 65,1 KB Aufrufe: 156
65,1 KB Aufrufe: 156
Zuletzt bearbeitet:
Schaltplan und Layout fertig
Hallo Leute!
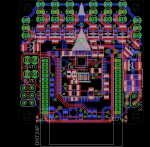
Heute möchte ich Euch meinen fertigen Schaltplan- und Layoutentwurf zeigen. Ich habe am Schaltplan noch ein paar letzte Optimierungen vorgenommen:
* Alle Ground Pins des Funkmoduls (DNT24P) sind nun mit der GND Leitung verbunden (Diese waren zwar bereits zuvor über das Modul selbst verbunden aber nun sind sie auch auf der Platine verbunden.).
* Für den Controller habe ich drei weitere Kondensatoren zur Spannungsversorungsstabilisierung hinzugefügt (Eigentlich sollte jeder Port über einen eigenen Kondensoror verfügen aber aus Platzgründen klappt das hier nicht. Immerhin habe ich vier Stück untergebracht. Dabei muss man aber sagen, dass diese Änderungen bereits sehr high levelig sind und es eigentlich kaum einen Unterschied macht!).
* Der Schaltplan wurde um einen Frame und der übersichthalber um Leitungslabels ergänzt.
Das Layout beinhaltet Daten für einen optionalen Bestückungsdruck. Das heisst, es werden in weiß Informationen zu den Steckverbindungen auf die Platine gedruckt. Ein Beispiel hierfür sind die '-' und '+' Texte an den jeweiligen Steckerpins.
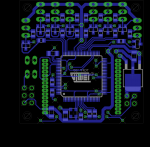
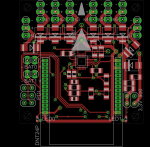
Ich habe Euch einmal ein Bild des Top Layers, des Bottom Layers und beider Layer erzeugt.
Wenn ich die Platine habe ätzen lassen und in Betrieb genommen habe, und wenn alles funktioniert, werde ich die EAGLE Daten hier im Forum für alle Interessenten hochladen.
Viele Grüße,
Markus
Hallo Leute!
Heute möchte ich Euch meinen fertigen Schaltplan- und Layoutentwurf zeigen. Ich habe am Schaltplan noch ein paar letzte Optimierungen vorgenommen:
* Alle Ground Pins des Funkmoduls (DNT24P) sind nun mit der GND Leitung verbunden (Diese waren zwar bereits zuvor über das Modul selbst verbunden aber nun sind sie auch auf der Platine verbunden.).
* Für den Controller habe ich drei weitere Kondensatoren zur Spannungsversorungsstabilisierung hinzugefügt (Eigentlich sollte jeder Port über einen eigenen Kondensoror verfügen aber aus Platzgründen klappt das hier nicht. Immerhin habe ich vier Stück untergebracht. Dabei muss man aber sagen, dass diese Änderungen bereits sehr high levelig sind und es eigentlich kaum einen Unterschied macht!).
* Der Schaltplan wurde um einen Frame und der übersichthalber um Leitungslabels ergänzt.
Das Layout beinhaltet Daten für einen optionalen Bestückungsdruck. Das heisst, es werden in weiß Informationen zu den Steckverbindungen auf die Platine gedruckt. Ein Beispiel hierfür sind die '-' und '+' Texte an den jeweiligen Steckerpins.
Ich habe Euch einmal ein Bild des Top Layers, des Bottom Layers und beider Layer erzeugt.
Wenn ich die Platine habe ätzen lassen und in Betrieb genommen habe, und wenn alles funktioniert, werde ich die EAGLE Daten hier im Forum für alle Interessenten hochladen.
Viele Grüße,
Markus
Anhänge
-
 310,5 KB Aufrufe: 124
310,5 KB Aufrufe: 124 -
 199 KB Aufrufe: 124
199 KB Aufrufe: 124 -
 240 KB Aufrufe: 128
240 KB Aufrufe: 128 -
 76,7 KB Aufrufe: 142
76,7 KB Aufrufe: 142
Zuletzt bearbeitet:
Vamp fc-a v1.0
Hallo Flugbegeisterte!
Ich habe heute endlich meine Printed Circuit Bords (BCP´s) erhalten, welche ich bei https://imall.iteadstudio.com in Auftrag gegeben habe. Ich habe 12 Exemplare für ca. 14€ (inkl. Versand) erhalten (Hätte ich keine Wunschfarbe bestellt, wären es sogar noch 5€ weniger gewesen!). Günstiger geht das wohl kaum, einfach unglaublich!!!
Ich bin mit der Quallität sehr zufrieden. Das Einzige, woran man Kritik äußern kann ist, dass der Bestückungsdruck leicht verschoben ist. Die Leiterbahnen, Vias, Pads usw. sitzen jedoch alle 100%ig. Der Stopplack ist spitze und das Metarial macht an sich einen hervorragenden Eindruck. Die Pads und Vias sind mit ordentlich Zinn benetzt, sodass ich beim Auflöten des ATXMega kein zusätzliches Lötzinn benötigt habe.
Ich habe eine Platine auch gleich bestückt, dabei hab ich gleich mal einen Controller und eine Platine versaut. Das kommt davon, wenn man zu lange keine SMD Lötpraxis hatte ;-P. Naja, jedenfalls hat der zweite Versuch geklappt. Getestet habe ich die Platine auch schon, es funktioniert alles!!! Ich bin äußerst zufrieden und auch ein bissel stolz muss ich zugeben.
Die folgenden Bilder zeigen die Platine in Rohform, während des Bestückens, eine Bilder habe ich als optische Kontrolle gemacht, um zu sehen, ob die Pins alle Kontakt haben und untereinander keine Lötbrücken haben. Das letzte Bild zeigt die FC mit aufgestecktem Funkmodul.
Diese FC wird nicht in meinem Testcopter zum Einsatz kommen, da ich dafür den THT Aufbau benötige, um weitere Sensoren usw. einfach hinzuzufügen. Die VAMP FC-A V1.0 kommt in meinem Holz-Octo zum einsatz, welchen ich in meinem Little Fluke Thema beschreibe.
Ihr finden im Anhang zusätzlich folgende Daten zu dieser FC:
* EAGLE Dateien (Schaltplan und Layout)
* Gerber Files (Hiermit kann die FC direkt bei https://imall.iteadstudio.com in Auftrag gegeben werden)
* Bilddateien (Top-Layer, Bottom-Layer, Top- und Bottom-Layer, Schaltplan)
Ich stelle meine Arbeit also zur freien Verfügung für alle, die gern selbst etwas programmieren möchten und auf einer getesteten Hardware aufsetzen möchten.
Viele Grüße,
Markus
Hallo Flugbegeisterte!
Ich habe heute endlich meine Printed Circuit Bords (BCP´s) erhalten, welche ich bei https://imall.iteadstudio.com in Auftrag gegeben habe. Ich habe 12 Exemplare für ca. 14€ (inkl. Versand) erhalten (Hätte ich keine Wunschfarbe bestellt, wären es sogar noch 5€ weniger gewesen!). Günstiger geht das wohl kaum, einfach unglaublich!!!
Ich bin mit der Quallität sehr zufrieden. Das Einzige, woran man Kritik äußern kann ist, dass der Bestückungsdruck leicht verschoben ist. Die Leiterbahnen, Vias, Pads usw. sitzen jedoch alle 100%ig. Der Stopplack ist spitze und das Metarial macht an sich einen hervorragenden Eindruck. Die Pads und Vias sind mit ordentlich Zinn benetzt, sodass ich beim Auflöten des ATXMega kein zusätzliches Lötzinn benötigt habe.
Ich habe eine Platine auch gleich bestückt, dabei hab ich gleich mal einen Controller und eine Platine versaut. Das kommt davon, wenn man zu lange keine SMD Lötpraxis hatte ;-P. Naja, jedenfalls hat der zweite Versuch geklappt. Getestet habe ich die Platine auch schon, es funktioniert alles!!! Ich bin äußerst zufrieden und auch ein bissel stolz muss ich zugeben
.Die folgenden Bilder zeigen die Platine in Rohform, während des Bestückens, eine Bilder habe ich als optische Kontrolle gemacht, um zu sehen, ob die Pins alle Kontakt haben und untereinander keine Lötbrücken haben. Das letzte Bild zeigt die FC mit aufgestecktem Funkmodul.
Diese FC wird nicht in meinem Testcopter zum Einsatz kommen, da ich dafür den THT Aufbau benötige, um weitere Sensoren usw. einfach hinzuzufügen. Die VAMP FC-A V1.0 kommt in meinem Holz-Octo zum einsatz, welchen ich in meinem Little Fluke Thema beschreibe.
Ihr finden im Anhang zusätzlich folgende Daten zu dieser FC:
* EAGLE Dateien (Schaltplan und Layout)
* Gerber Files (Hiermit kann die FC direkt bei https://imall.iteadstudio.com in Auftrag gegeben werden)
* Bilddateien (Top-Layer, Bottom-Layer, Top- und Bottom-Layer, Schaltplan)
Ich stelle meine Arbeit also zur freien Verfügung für alle, die gern selbst etwas programmieren möchten und auf einer getesteten Hardware aufsetzen möchten.
Viele Grüße,
Markus
Anhänge
-
 331,1 KB Aufrufe: 108
331,1 KB Aufrufe: 108 -
 406,5 KB Aufrufe: 95
406,5 KB Aufrufe: 95 -
 373,2 KB Aufrufe: 104
373,2 KB Aufrufe: 104 -
 463,6 KB Aufrufe: 98
463,6 KB Aufrufe: 98 -
 352,5 KB Aufrufe: 92
352,5 KB Aufrufe: 92 -
 422,5 KB Aufrufe: 94
422,5 KB Aufrufe: 94 -
 426,9 KB Aufrufe: 96
426,9 KB Aufrufe: 96 -
 488,6 KB Aufrufe: 97
488,6 KB Aufrufe: 97 -
 422,3 KB Aufrufe: 106
422,3 KB Aufrufe: 106
Zuletzt bearbeitet:







Neuer Flugtest
Hallo Leute!
Ich habe lange Nichts von mir hören lassen. Das liegt daran, dass ich viel an den Parametern gedreht habe und aus dem PI Regler der Yaw Achse auch einen PID Regler gemacht habe. Es ist sehr mühsam das Reglerferhalten so hinzubekommenm, wie man es von kommerziellen Flugsteuerungen gewohnt ist. Meine Regelung ist allerdings schon wesentlich besser geworden. Die Yaw Drehgeschwindingkeit ist mittlerweile akzeptabel und das Teil liegt gut in der Luft. Leider gerät das Teil noch bei Windstößen ins leichte Schwingen. Und ich bin auch noch nicht zufrieden mit dem Filter. Beim Bescheuligen wird die Lage nicht 100%ig ermittelt, sodass der Copter immer leicht zurückschwingt. Hier mal ein aktuelles Video vom Flugverhalten:
[video=youtube;ABAetJ5_0HI]https://www.youtube.com/watch?v=ABAetJ5_0HI&feature=youtu.be[/video]
Gruß, Markus
Hallo Leute!
Ich habe lange Nichts von mir hören lassen. Das liegt daran, dass ich viel an den Parametern gedreht habe und aus dem PI Regler der Yaw Achse auch einen PID Regler gemacht habe. Es ist sehr mühsam das Reglerferhalten so hinzubekommenm, wie man es von kommerziellen Flugsteuerungen gewohnt ist. Meine Regelung ist allerdings schon wesentlich besser geworden. Die Yaw Drehgeschwindingkeit ist mittlerweile akzeptabel und das Teil liegt gut in der Luft. Leider gerät das Teil noch bei Windstößen ins leichte Schwingen. Und ich bin auch noch nicht zufrieden mit dem Filter. Beim Bescheuligen wird die Lage nicht 100%ig ermittelt, sodass der Copter immer leicht zurückschwingt. Hier mal ein aktuelles Video vom Flugverhalten:
[video=youtube;ABAetJ5_0HI]https://www.youtube.com/watch?v=ABAetJ5_0HI&feature=youtu.be[/video]
Gruß, Markus
- Status
- Nicht offen für weitere Antworten.

