
Moin Moin,
habe heute Nachmittag nochmal schnell die 3.1 r5 Beta geflasht und AutoTune über die Channel 7 Option durchgeführt - siehe hier im WIKI: http://copter.ardupilot.com/wiki/autotune/
Ich hatte meinen Black Widow vorher so weit Pid-technisch getunt, dass er für mich zumindest gut flog... (aber eben nicht bis ins letzte Detail/Feintuning) Na ja, nun nach dem AutoTunig fliegt er nicht nur, sondern ist eigentlich ein neuer Copter - bin völlig begeistert - Stabi, Alt Hold, Position Hold und Position mit ordentlich Gas und auch fallen lassen getestet, plus Gieren bei Wind, wo er vorher doch ein wenig mehr wackelte - Alles Supi und der Copter hängt nun wesentlich feinfühliger und auch ruhiger an den Sticks.
Anbei mal zwei Bilder von den geänderten Pids Vorher/Nachher.
Vorher:
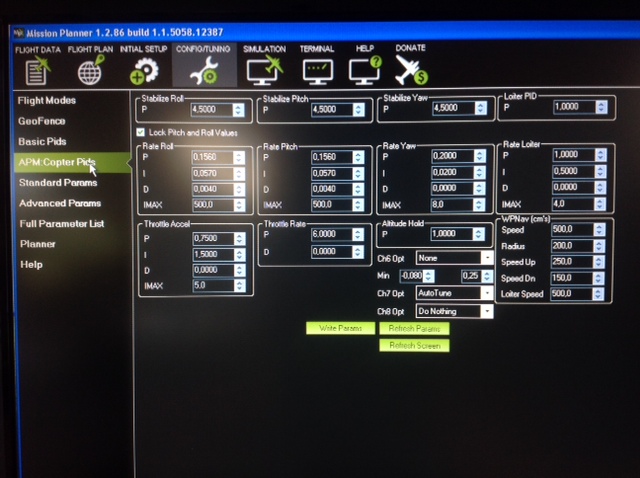
Nach dem AutoTuning:

Was sind Eure Erfahrungen mit dem AutoTuning? Auf YT habe ich dabei einige Copter runterfallen sehen...;-)
Was aber bei mir überhaupt kein Problem war - während der ganzen Prozedur im AltHold Modus (bei Wind), musste ich zwar ein paar mal wieder den Copter ranholen, aber er hat dann klaglos den Tuningtanz weitergeführt, bis er nach ca. 6-7 Minuten fertig war.
Beste Grüße,
Matthias
habe heute Nachmittag nochmal schnell die 3.1 r5 Beta geflasht und AutoTune über die Channel 7 Option durchgeführt - siehe hier im WIKI: http://copter.ardupilot.com/wiki/autotune/
Ich hatte meinen Black Widow vorher so weit Pid-technisch getunt, dass er für mich zumindest gut flog... (aber eben nicht bis ins letzte Detail/Feintuning) Na ja, nun nach dem AutoTunig fliegt er nicht nur, sondern ist eigentlich ein neuer Copter - bin völlig begeistert - Stabi, Alt Hold, Position Hold und Position mit ordentlich Gas und auch fallen lassen getestet, plus Gieren bei Wind, wo er vorher doch ein wenig mehr wackelte - Alles Supi und der Copter hängt nun wesentlich feinfühliger und auch ruhiger an den Sticks.
Anbei mal zwei Bilder von den geänderten Pids Vorher/Nachher.
Vorher:
Nach dem AutoTuning:
Was sind Eure Erfahrungen mit dem AutoTuning? Auf YT habe ich dabei einige Copter runterfallen sehen...;-)
Was aber bei mir überhaupt kein Problem war - während der ganzen Prozedur im AltHold Modus (bei Wind), musste ich zwar ein paar mal wieder den Copter ranholen, aber er hat dann klaglos den Tuningtanz weitergeführt, bis er nach ca. 6-7 Minuten fertig war.
Beste Grüße,
Matthias
Zuletzt bearbeitet:
")

