
STorM32 BGC: 3-Achsen STM32 Brushless Gimbal Controller
- Themenstarter OlliW
- Beginndatum
")
zum Bt Problem
* die Problematik mit der Stromversorgung wurde ja schon angesprochen
* das mit HC05 vs HC06 wurde auch bereits angesprochen. Im Englishen Thread wurden verschiedentlich Methoden aufgezeigt wie man rausfinden kann ob es ein HC05 ist (dazu muss ein Pin auf Masse gelötet werden, und die AT Kommandos benutzt werden, weitere Details habe ich vergessen)
* ein weiteres Problem was in letzter Zeit auftaucht ist dass es wohl eine "neue" Firmware für die HC06 Module gibt, die älteren Versionen der Gui nicht bekannt ist, das kann man leicht erkennen wenn man sich den Output des BT-Konfiguratorfensters ansieht
nachdem du sagst dass bei 9600 baud ein BT Modul erkannt wurde, tippe ich auf Letzteres
* die Problematik mit der Stromversorgung wurde ja schon angesprochen
* das mit HC05 vs HC06 wurde auch bereits angesprochen. Im Englishen Thread wurden verschiedentlich Methoden aufgezeigt wie man rausfinden kann ob es ein HC05 ist (dazu muss ein Pin auf Masse gelötet werden, und die AT Kommandos benutzt werden, weitere Details habe ich vergessen)
* ein weiteres Problem was in letzter Zeit auftaucht ist dass es wohl eine "neue" Firmware für die HC06 Module gibt, die älteren Versionen der Gui nicht bekannt ist, das kann man leicht erkennen wenn man sich den Output des BT-Konfiguratorfensters ansieht
nachdem du sagst dass bei 9600 baud ein BT Modul erkannt wurde, tippe ich auf Letzteres
Hallo Flo, ich tipp noch bei deinem BUG auf falsche IMU Settings, vermutlich -> y <- vertauscht!?
@Upgrade, I2C errors!? ... Evtl. Mal dein Liveview anschauen und gegebenenfalls einen Ferrit rein oder die Spannung von 3S aud 2S!
@Upgrade, I2C errors!? ... Evtl. Mal dein Liveview anschauen und gegebenenfalls einen Ferrit rein oder die Spannung von 3S aud 2S!
zum Bt Problem
* die Problematik mit der Stromversorgung wurde ja schon angesprochen
* die Problematik mit der Stromversorgung wurde ja schon angesprochen
Hallo,
ich muss jetzt leider mal wieder mit einer Anfängerfrage kommen.
Ich habe ein Storm32 v1.31 und mit ein paar Motoren ein Gimbal gebastelt und möchte es, wie ja hier und auf Ollis >seite gut beschrieben, einstellen.
So, leider scheitere ich bereits daran, dass ich nach dem flashen den neuen USB-Post nicht mehr angezeigt bekomme. Muss ich das überhaupt?
Da ich zwar auf Storm zugreifen kann, allerdings die Kalibrierung nicht wirklich funktioniert und selbst wenn er den Prozess einmal komplett durchläuft, spackt die Kamera nach dem Piepen nur wild hin und her. Ich dachte nun, dass das mein Fehler sein könnte.
Ich habe bereits die FAQs und auch große Teile des Forums und der Suchfunktion genutzt, aber finde keine Lösung. Es wäre deshalb sehr nett, wenn mir evtl. jemand einen Tipp geben kann und/oder mich auf einen Gedankenfehler hinweisen könnte.
ich muss jetzt leider mal wieder mit einer Anfängerfrage kommen.
Ich habe ein Storm32 v1.31 und mit ein paar Motoren ein Gimbal gebastelt und möchte es, wie ja hier und auf Ollis >seite gut beschrieben, einstellen.
So, leider scheitere ich bereits daran, dass ich nach dem flashen den neuen USB-Post nicht mehr angezeigt bekomme. Muss ich das überhaupt?
Da ich zwar auf Storm zugreifen kann, allerdings die Kalibrierung nicht wirklich funktioniert und selbst wenn er den Prozess einmal komplett durchläuft, spackt die Kamera nach dem Piepen nur wild hin und her. Ich dachte nun, dass das mein Fehler sein könnte.
Ich habe bereits die FAQs und auch große Teile des Forums und der Suchfunktion genutzt, aber finde keine Lösung. Es wäre deshalb sehr nett, wenn mir evtl. jemand einen Tipp geben kann und/oder mich auf einen Gedankenfehler hinweisen könnte.
Zuletzt bearbeitet:
Moin
Mach das mal so wie dort gezeigt!
https://www.youtube.com/watch?v=HwaHjRw1Qqg&list=PLGyXhzwnsVq_cfXu2cvCFWfxnVI_wST3p
Neuste Firmware verwenden!
Mach das mal so wie dort gezeigt!
https://www.youtube.com/watch?v=HwaHjRw1Qqg&list=PLGyXhzwnsVq_cfXu2cvCFWfxnVI_wST3p
Neuste Firmware verwenden!
Jaha, das habe ich. Das Flashen hat auch genau so funktioniert. Dos-Fesnster öffnet etc.
Aber was ist dann? Dann schließe ich alles wieder ab und entferne den zusätzlichen USB-Port. Schließe das normale USB-Kabel wieder an und öffne die GUI. Dort ist aber nur ein USB-Port auswählbar. Der, der vor dem Flashen und ohne den zusätzlichen USP-Post angezeigt worden ist. Müsste sich dort nicht etwas geändert haben?
Gedankenfehler oder Doofheit?
Aber was ist dann? Dann schließe ich alles wieder ab und entferne den zusätzlichen USB-Port. Schließe das normale USB-Kabel wieder an und öffne die GUI. Dort ist aber nur ein USB-Port auswählbar. Der, der vor dem Flashen und ohne den zusätzlichen USP-Post angezeigt worden ist. Müsste sich dort nicht etwas geändert haben?
Gedankenfehler oder Doofheit?
Hallo,
ich muss jetzt leider mal wieder mit einer Anfängerfrage kommen.
Ich habe ein Storm32 v1.31 und mit ein paar Motoren ein Gimbal gebastelt und möchte es, wie ja hier und auf Ollis >seite gut beschrieben, einstellen.
So, leider scheitere ich bereits daran, dass ich nach dem flashen den neuen USB-Post nicht mehr angezeigt bekomme. Muss ich das überhaupt?
Da ich zwar auf Storm zugreifen kann, allerdings die Kalibrierung nicht wirklich funktioniert und selbst wenn er den Prozess einmal komplett durchläuft, spackt die Kamera nach dem Piepen nur wild hin und her. Ich dachte nun, dass das mein Fehler sein könnte.
Ich habe bereits die FAQs und auch große Teile des Forums und der Suchfunktion genutzt, aber finde keine Lösung. Es wäre deshalb sehr nett, wenn mir evtl. jemand einen Tipp geben kann und/oder mich auf einen Gedankenfehler hinweisen könnte.
ich muss jetzt leider mal wieder mit einer Anfängerfrage kommen.
Ich habe ein Storm32 v1.31 und mit ein paar Motoren ein Gimbal gebastelt und möchte es, wie ja hier und auf Ollis >seite gut beschrieben, einstellen.
So, leider scheitere ich bereits daran, dass ich nach dem flashen den neuen USB-Post nicht mehr angezeigt bekomme. Muss ich das überhaupt?
Da ich zwar auf Storm zugreifen kann, allerdings die Kalibrierung nicht wirklich funktioniert und selbst wenn er den Prozess einmal komplett durchläuft, spackt die Kamera nach dem Piepen nur wild hin und her. Ich dachte nun, dass das mein Fehler sein könnte.
Ich habe bereits die FAQs und auch große Teile des Forums und der Suchfunktion genutzt, aber finde keine Lösung. Es wäre deshalb sehr nett, wenn mir evtl. jemand einen Tipp geben kann und/oder mich auf einen Gedankenfehler hinweisen könnte.
OK vielen Dank für die Tipps. Ich habe das Gimbal noch mal ausbalanciert und den USB Adapter erneut angeschlossen. Ich habe jetzt noch einmal erneut geflasht und eine andere Version getestet. Obwohl ich mir sicher war, das ich bisher immer die korrekte Variante genommen habe war das evtl. der Fehler. Es schein nun zu funkionieren.
Das ein anderer USB-Port angezeigt werden muss (nach dem flashen) stimmt also offensichtlich nicht. Bei mir heißt der COM Port auch USBSER000. Jetzt habe ich nur noch ein Problem:
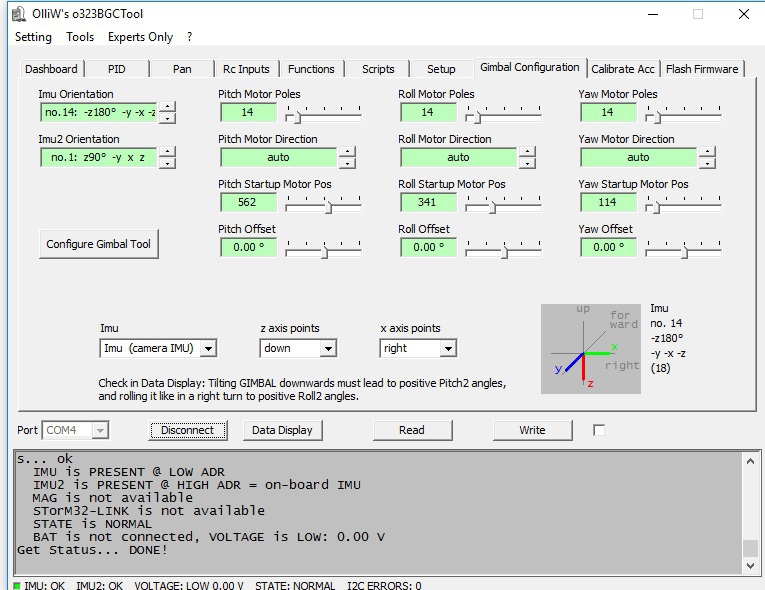
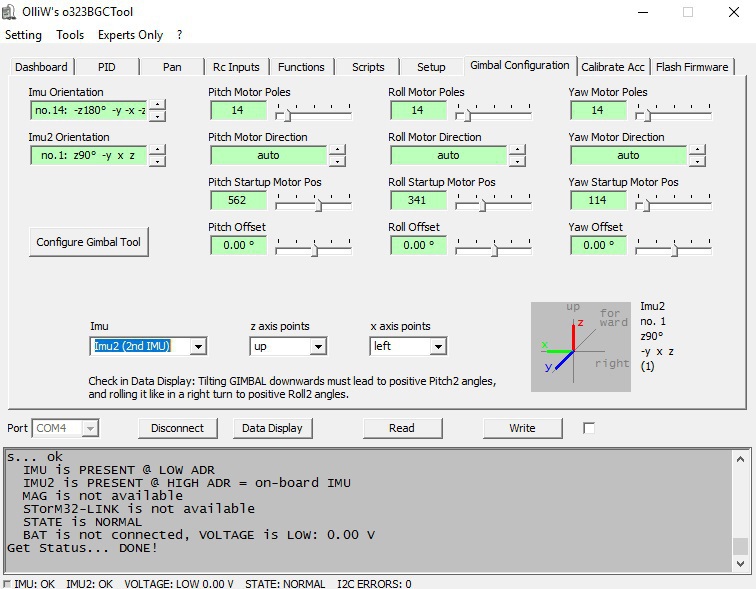
Hängt das Gimbal am Copter, funktioniert es. Da ich das Gimbal aber auch auf ein Stativ setzen wollte, um es durch die Gegend zu tragen, muss ich es einmal drehen. Dann funktioniert es nicht mehr. Starte ich es auf dem Stativ (also verkehrt herum) fängt es wie wild an zu zucken und dreht sich, wenn es gepiept hat. Ich vermute das er dann mit den Achsen nicht klar kommt. Ich habe jetzt den Abend alle möglichen Varianten bei der Achsausrichtung unter "Gimbal Configuration" ausprobiert, bekomme es aber nicht hin. Gibt es da noch einen Trick? Oder hat das evtl. jemand bereits gemacht und kann mir seine Einstellungen einmal nennen?
Wenn das Gimbal hängt steht derzeit mein IMU Achse auf down und left und die IMU2 Achse auf down und bachwards.
Das ein anderer USB-Port angezeigt werden muss (nach dem flashen) stimmt also offensichtlich nicht. Bei mir heißt der COM Port auch USBSER000. Jetzt habe ich nur noch ein Problem:
Hängt das Gimbal am Copter, funktioniert es. Da ich das Gimbal aber auch auf ein Stativ setzen wollte, um es durch die Gegend zu tragen, muss ich es einmal drehen. Dann funktioniert es nicht mehr. Starte ich es auf dem Stativ (also verkehrt herum) fängt es wie wild an zu zucken und dreht sich, wenn es gepiept hat. Ich vermute das er dann mit den Achsen nicht klar kommt. Ich habe jetzt den Abend alle möglichen Varianten bei der Achsausrichtung unter "Gimbal Configuration" ausprobiert, bekomme es aber nicht hin. Gibt es da noch einen Trick? Oder hat das evtl. jemand bereits gemacht und kann mir seine Einstellungen einmal nennen?
Wenn das Gimbal hängt steht derzeit mein IMU Achse auf down und left und die IMU2 Achse auf down und bachwards.



Schau dir mal den Link an -> runter bis Appendix http://www.olliw.eu/storm32bgc-wiki/Manually_Setting_the_IMU_Orientation
Prinzipiell hast du recht. 2 Achsen müssen gedreht werden. Je nachdem wie du deine IMU´s eingebaut hast.
Prinzipiell hast du recht. 2 Achsen müssen gedreht werden. Je nachdem wie du deine IMU´s eingebaut hast.
Hi,
Folgendes Problem:
Meine Fotos werden i.d.R. selbst bei Belichtungszeiten von 1/10sec oder länger scharf, aber bei Videos gibt es immer ein sehr störendes Zittern:
https://www.youtube.com/watch?v=9yrns88vCHY&feature=youtu.be
Wie bekommt man das weg?
Das Gimbal ist eigentlich sehr vibrationsarm. Wenn ich es im Schwebeflug anfasse, kann ich praktisch keine Vibrationen bemerken.
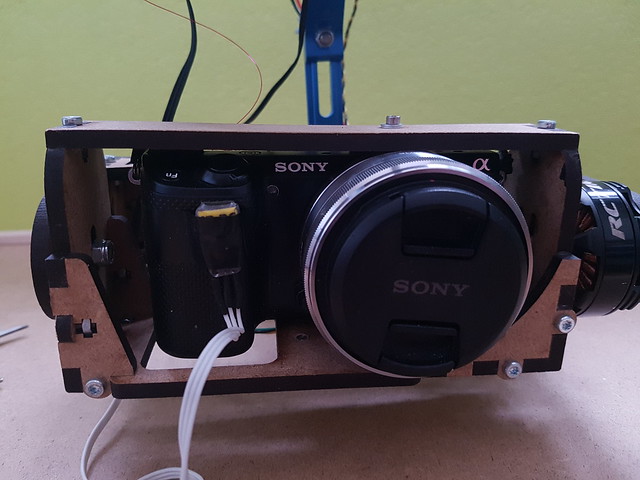
Die Cam ist eine Nex 5t mit 16mm Sony Objektiv.
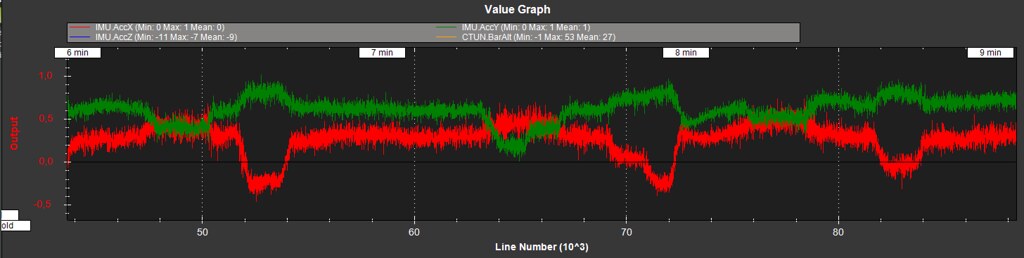
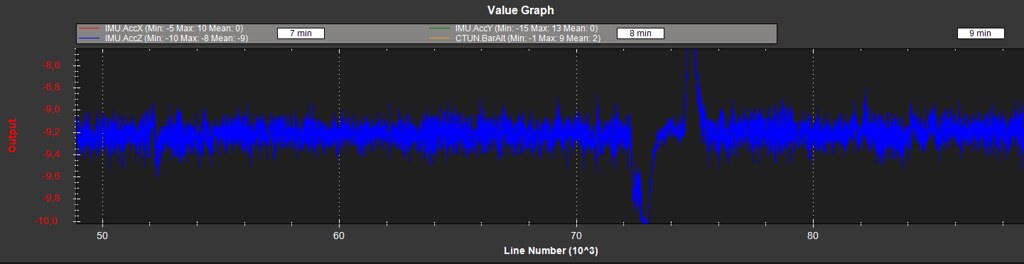
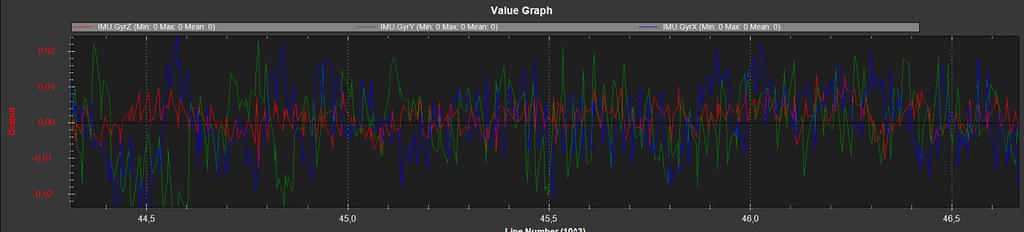
Vibrationslog vom AUAV-X2 (XY und Z Achse)
Folgendes Problem:
Meine Fotos werden i.d.R. selbst bei Belichtungszeiten von 1/10sec oder länger scharf, aber bei Videos gibt es immer ein sehr störendes Zittern:
https://www.youtube.com/watch?v=9yrns88vCHY&feature=youtu.be
Wie bekommt man das weg?
Das Gimbal ist eigentlich sehr vibrationsarm. Wenn ich es im Schwebeflug anfasse, kann ich praktisch keine Vibrationen bemerken.
Die Cam ist eine Nex 5t mit 16mm Sony Objektiv.
Vibrationslog vom AUAV-X2 (XY und Z Achse)
Also das Problem tritt immer auf. Beim langsamen Aufsteigen etwas weniger als im Vorwärtsflug. Das würde wohl auf Verwirblungen hindeuten?
Gemäss Log treten um die Yaw Achse keine stärkeren Schwankungen/Vibrationen auf als um die anderen Achsen [Gyro Yaw Daten]
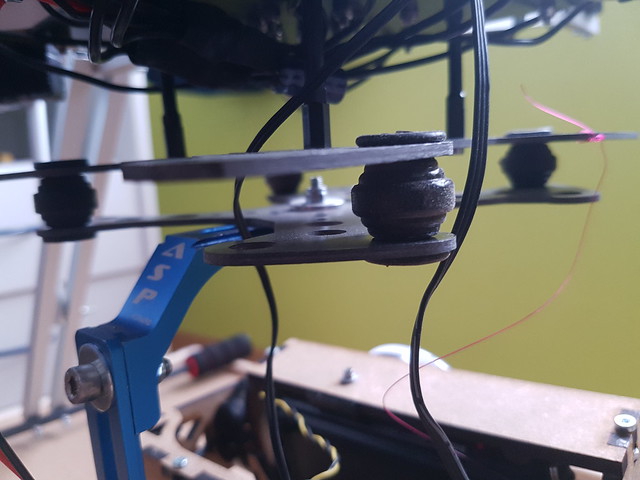
Das (2-Achs) Gimbal ist momentan mit 4 relativ weichen Dämpfern aufgehängt, da ich möglichst alle Vibrationen loswerden wollte. Ich hatte aber auch schon alle 12 Dämpfer eingesetzt, und das hat keinen wesentlichen Unterschied gemacht.
Die Kamera ist unten an der Stativschrauben und oben am Blitzschuh mit dem Gimbal verschraubt. Das Gimbal selber ist eigentlich sehr stabil (verschraubt & verklebt aus 5mm mdf).
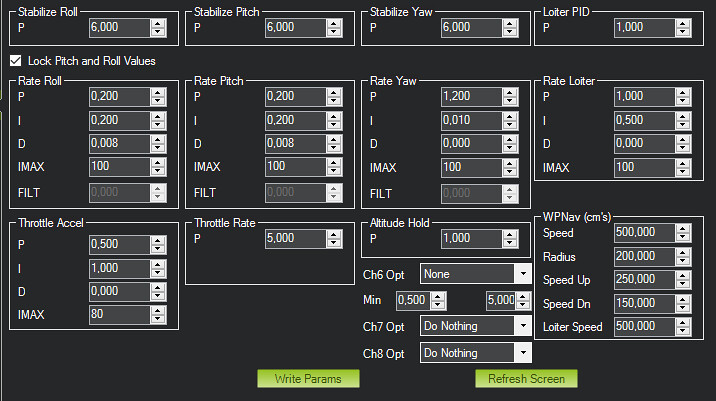
Die PIDs des Kopters sind wie folgt
Ein zweites, etwas älteres Beispielvideo:
https://www.youtube.com/watch?v=1Twrff3pUWw&feature=youtu.be
Edit: Dropboxlink zu einem Log
https://dl.dropboxusercontent.com/u/54651251/2016-12-17 16-43-27.log
Gemäss Log treten um die Yaw Achse keine stärkeren Schwankungen/Vibrationen auf als um die anderen Achsen [Gyro Yaw Daten]
Das (2-Achs) Gimbal ist momentan mit 4 relativ weichen Dämpfern aufgehängt, da ich möglichst alle Vibrationen loswerden wollte. Ich hatte aber auch schon alle 12 Dämpfer eingesetzt, und das hat keinen wesentlichen Unterschied gemacht.
Die Kamera ist unten an der Stativschrauben und oben am Blitzschuh mit dem Gimbal verschraubt. Das Gimbal selber ist eigentlich sehr stabil (verschraubt & verklebt aus 5mm mdf).
Die PIDs des Kopters sind wie folgt
Ein zweites, etwas älteres Beispielvideo:
https://www.youtube.com/watch?v=1Twrff3pUWw&feature=youtu.be
Edit: Dropboxlink zu einem Log
https://dl.dropboxusercontent.com/u/54651251/2016-12-17 16-43-27.log
Zuletzt bearbeitet:

