Moin moin!
")
ich bin gestern via Google auf das FPV-Forum gestoßen und habe mich direkt registriert. Nwch kurzem studieren der Threads bin ich auf OlliW gestoßen, welcher das SToRM32 Board entwickelt hat. Scheint ein Interessantes Teil zu sein, weshalb ich mich über Feedback freuen würde. Kommen wir nun zur Sache.
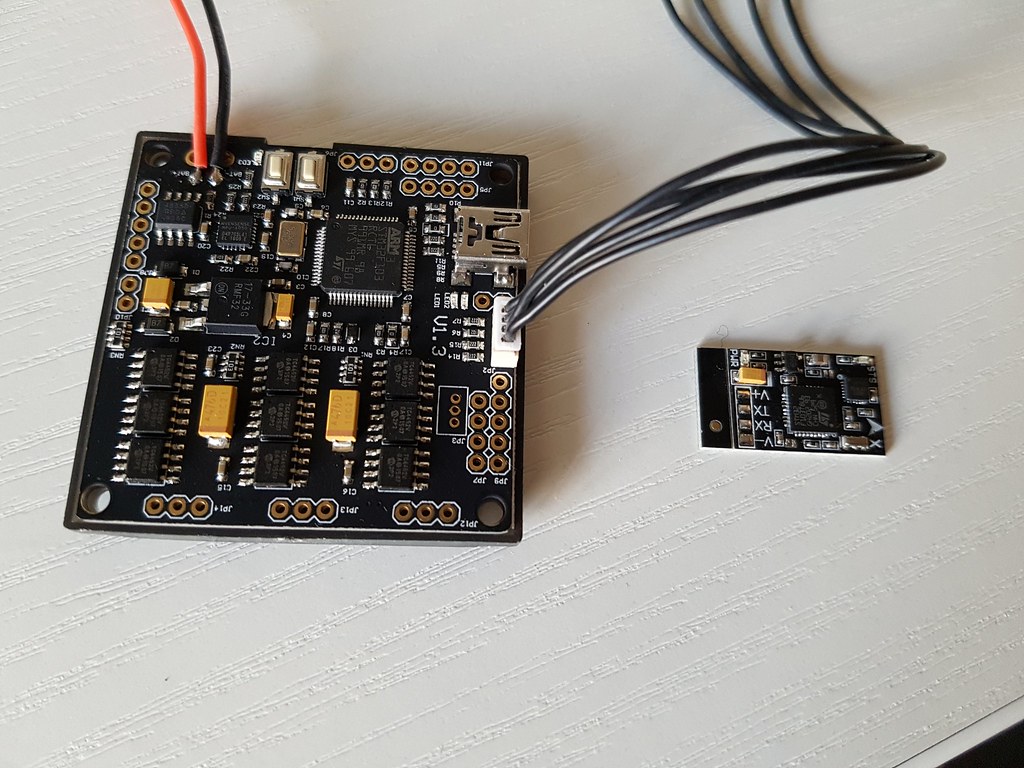
Ich habe aktuell an meine DYS Eagle Eye (3-Axis) eine DYS Basecam 32 bit Steuerung mit einer IMU angeschlossen. Das ganze System funktioniert seit dem ersten Tag leider nicht so gut. Habe das Teil gebraucht gekauft, jedoch schaut alles neuwertig aus. Mir scheint es so, als hätte der Vorbesitzer mir schindluder verkauft- zumindest was den Controller angeht.
Fangen wir ganz vorne an. Ich habe zunächst mir zunächst folgende Software geladen:
- Treiber CP210 (
http://www.silabs.co...vcpdrivers.aspx)
- SimpleBGC 2.60b4 (
https://www.basecame...s/32bit/#latest)
Anschließend habe ich die IMU an meinen Controller gesteckt und erst danach via USB an meinen Rechner verbunden. Das Board wird erkannt und es kann auch verbunden werden. Leider zeigen mir die Uhren auf der rechten Seite des GUI keine Daten des Gyroskops an. Erst wenn ich auf "IMU Calibration Helper" klicke, werden mir Signale angezeigt, welche auch passen. Anschließend habe ich das System auf jeder Achse Kalibriert und die Daten abgespeichert. Nachdem ich das Fenster geschlossen habe, wurden mir die Gyroskopdaten leider immer noch nicht auf der rechten Seite angezeigt. Habe dann durch gedrückthalten der Menü-taste auf dem Board das Board zurückgesetzt und das ganze wiederholt. Leider war auch dann keine Besserung zu erkennen, jedoch konnte ich überraschenderweise Daten auf mein Board schreiben, was zuvor nicht möglich war (verschiedene USB-Kabel bereits probiert). Somit habe ich angefangen Power auf die einzelnen Motoren zu geben. Nacheinander habe ich dann den PID angepasst (zuerst Proportional, dann Differential und zum schluss Integral zum Glätten des Einschwingvorgangs). Damit hab ich mich ungefähr zwei Stunden beschäftigt. Nachdem ich dann auf dem Stativ ganz gute Ergebnisse hatte (Ständer für die Gimbal) hab ich das Board disconnected und bin mit meiner Kamera an der Gimbal durch mein Zimmer gelaufen. Sofort fiel mir auf, dass sich die Kamera nicht in die Horizontale zurückbewegt (was sie gemacht hat, als sie connected war), weshalb ich dann wieder den Controller connected habe und die Leistungen der Achsen etwas gesteigert hab (etwa auf 200 für Roll und 170 für Pitch mit einem + von etwa 20 für Roll und 10 für Pitch). Nachdem ich das Board wieder disconnected habe, trat der Fehler wieder auf. Habe dann versucht mit der Hand in die Horizontale zu drücken, jedoch hat er zurückgeregelt. Leistung hat man in dem Fall gespürt, da schon Saft dahinter war. Anschließend habe ich dann ein wenig im Reiter "Board" und "Execute action" nachgeschaut und bin auf "Set Horizontal" oder so gestoßen. Hab das dann gemacht und siehe da, er hat sich zurückgestellt, jedoch ging es beim Bewegen der Gimbal wieder in Schräglage. Hab dann also unter dem Reiter "Service" und "Long press" eingestellt, dass ich durch gedrückhalten der Menütaste am Board die Lage zurückstelle. Das brachte mir leider auch keine Besserung, weshalb ich dann auf die IMU auf "Auto" Kalibrieren wollte. In dem Moment traten ne Menge I2C Fehler auf und ich konnte nichts mehr Schreiben. Zudem haben dann auf der rechten Seite die Uhren wild durch die Gegend gezeigt (obwohl alles still stand). Wollte dass dann wieder im "IMU Calibration Helper" zurücksetzen, jedoch ohne Erfolgt, denn da wurde mir kein Signal angezeigt. <_< Dadurch, dass ich die Long Press-Taste durch die Horizontalklage ersetzt habe, konnte ich das Board auch nicht mehr zurücksetzen und durch "Erase EEPROM" konnte ich das Board auch nicht mehr zurücksetzen, da ich nichts mehr schreiben konnte. <_<
Ende vom Lied ist, dass ich im Moment mit dem Board connecten, ich jedoch nichts schreiben kann.
Bekomme teilweise ellenlange Fehler angezeigt, die ich aktuell nicht mehr im Kopf habe. Selbst das Laden der gespeicherten IMU-Daten ist nicht möglich. Meine was mit Couln´t write command und zahlen wie 32, 34 und 64 oder so. :-[
Kann mir jemand helfen? Im Netz finde ich nichts und mir scheint es so, als wäre der Vorbesitzer zu unfähig und unehrlich gewesen. :bang:
Das ganze wird mit einem Lipo 3S betrieben.
Viele Grüße!