
Hi,
nachdem ich das Problem zwar einige Male im Netz gefunden habe, aber keine eindeutige Lösung dafür:
Mein Hexacopter dreht sich immer ein langsam Stück zurück (ca. 3°), wenn ich ihn manuell um die Yaw-Achse drehe. Die Drehgeschwindigkeit ist dabei egal.
Das ist reproduzierbar mit zwei unterschiedlichen Sätzen ausgewuchteter Propeller.(13x38 und 12x45 Gemfan)
Wenn ich das Abfluggewicht erhöhe (Kamera+Gimbal) pendelt er mit der gleichen Geschwindigkeit um die Yaw-Achse hin und her.
Die Änderung von Stabilize Yaw (3-6,5) und/oder Rate Yaw (0,15-0.25) haben keine merkliche Auswirkung auf dieses Verhalten.
Die Vibrationen im gedämpft aufgehängten APM sind unter 1 in allen Richtungen.
Regler sind eingelernt, Kompassbeeinflussung ca. 2% (auf Turm)
1. Was ist ein sinnvoller Bereich, die Ps zu testen
2. Wo ist mein nächster Ansatzpunkt. Ausrichtung der Motoren? Vibrationen auf dem Kompassmodul? Zu weich aufgehängtes APM?
Kann später noch ein Log posten, wenn dies hilft...
Danke,
Nils
Meine PIDs. Ein zweiter Flug hat einen noch höheren Pitch-Wert ergeben, der dann echt knackig ist.

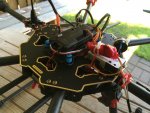
Kopter. Das rote Geschwurbel auf dem Empfänger ist ein Arduino Pro Mini, ich habe hier gerade keinen Schrumpflschlauch. Der GPS-Schutz ist auch noch provisorisch...

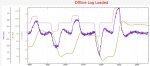
Und Log, hier sieht man das Nachschwingen ganz gut.
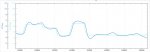
Ich habe mal den Gyrowert für Z mit aufgenommen...
Der hat einen starken Jitter drinnen, da ich testweise die Dämpfung des APMs minimiert habe. Das hatte aber keine Auswirkungen auf das YAW-Verhalten...
nachdem ich das Problem zwar einige Male im Netz gefunden habe, aber keine eindeutige Lösung dafür:
Mein Hexacopter dreht sich immer ein langsam Stück zurück (ca. 3°), wenn ich ihn manuell um die Yaw-Achse drehe. Die Drehgeschwindigkeit ist dabei egal.
Das ist reproduzierbar mit zwei unterschiedlichen Sätzen ausgewuchteter Propeller.(13x38 und 12x45 Gemfan)
Wenn ich das Abfluggewicht erhöhe (Kamera+Gimbal) pendelt er mit der gleichen Geschwindigkeit um die Yaw-Achse hin und her.
Die Änderung von Stabilize Yaw (3-6,5) und/oder Rate Yaw (0,15-0.25) haben keine merkliche Auswirkung auf dieses Verhalten.
Die Vibrationen im gedämpft aufgehängten APM sind unter 1 in allen Richtungen.
Regler sind eingelernt, Kompassbeeinflussung ca. 2% (auf Turm)
1. Was ist ein sinnvoller Bereich, die Ps zu testen
2. Wo ist mein nächster Ansatzpunkt. Ausrichtung der Motoren? Vibrationen auf dem Kompassmodul? Zu weich aufgehängtes APM?
Kann später noch ein Log posten, wenn dies hilft...
Danke,
Nils
Meine PIDs. Ein zweiter Flug hat einen noch höheren Pitch-Wert ergeben, der dann echt knackig ist.
Kopter. Das rote Geschwurbel auf dem Empfänger ist ein Arduino Pro Mini, ich habe hier gerade keinen Schrumpflschlauch. Der GPS-Schutz ist auch noch provisorisch...
Und Log, hier sieht man das Nachschwingen ganz gut.
Ich habe mal den Gyrowert für Z mit aufgenommen...
Der hat einen starken Jitter drinnen, da ich testweise die Dämpfung des APMs minimiert habe. Das hatte aber keine Auswirkungen auf das YAW-Verhalten...
Zuletzt bearbeitet:
") )
)
