Hallo FPV Community,
ich bin heute mit meinem 3dr y6 geflogen und bin nach ca. 1min aus ungeklärten Dingen abgestürzt.
Ich hatte schonmal ein ähnliches Verhalten, aber dabei ist der y6 nur kurz abgesackt und hat sich dann wieder gefangen.
Als Steuerung setze ich Pixhawk ein mit Arducopter 3.2.
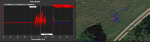
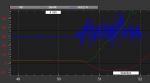
Ich bin im Loiter Mode geflogen und habe den y6 aufsteigen lassen. Aus ungeklärten Dingen ist der copter dann in einen schnellen sinkflug gegangen und abgestürzt. Ich habe die Throttle noch voll aufgerissen aber keine Reaktion. Auch hatte im am Boden keine Kontrolle mehr über den Copter im Loiter Mode.
Ich habe versucht die Logs auszuwerten, werde aber nicht so recht schlau daraus. Es sieht nicht nach einem Batterie Problem aus.
Anbei hänge ich die Log Datei an.
Schonmal vielen Dank für eure Hilfe.
Gruß
Savage
ich bin heute mit meinem 3dr y6 geflogen und bin nach ca. 1min aus ungeklärten Dingen abgestürzt.
Ich hatte schonmal ein ähnliches Verhalten, aber dabei ist der y6 nur kurz abgesackt und hat sich dann wieder gefangen.
Als Steuerung setze ich Pixhawk ein mit Arducopter 3.2.
Ich bin im Loiter Mode geflogen und habe den y6 aufsteigen lassen. Aus ungeklärten Dingen ist der copter dann in einen schnellen sinkflug gegangen und abgestürzt. Ich habe die Throttle noch voll aufgerissen aber keine Reaktion. Auch hatte im am Boden keine Kontrolle mehr über den Copter im Loiter Mode.
Ich habe versucht die Logs auszuwerten, werde aber nicht so recht schlau daraus. Es sieht nicht nach einem Batterie Problem aus.
Anbei hänge ich die Log Datei an.
Schonmal vielen Dank für eure Hilfe.
Gruß
Savage
Anhänge
-
344,7 KB Aufrufe: 12