D
Hallo Mario
Hi Headwind,
DAs ist eine gute frage, wie erkenne ich ob die pullups integriert sind?
Habe heute Morgen SCL und SDA mal am Oszi gehabt, die Pulse sehen nicht wirklich gut aus mehr wie ein Sägezahn.
Hab mal ein PAar Screenshots gemacht was denkt Du / IHR ? Normal ??
Laut Datenblatt sollte es die 5V Version sein.
Die Versorgung habe ich vom Arduino Regler genommen er gibt rund 4,8V Stabil aus, als Kondensator sollten eigentlich 100nf dazwischen, mit 0,1 war es aber etwas besser... aber wirklich nur etwas...
Mit 3,3V könnte ich aber auch noch mal Testen, vielleicht überfahre ich den Armen Kerl auch nur.
Hi Headwind,
Hat Dein breakout die pullups integriert ? Es gibt hier Experten, die sich in oXs, Arduino und 4525 besser auskennen.
Ich brauche den 4525 mit einem anderen MP, und dort ist ein pullup absolut zwingend. Ich habe blass in Erinnerung, dass ein Arduino allenfalls ohne pullups auskommt. Kannst Du SCL und SDA an ein Oszi hängen und mal schauen wie die Pulse laufen ? Die Signale müssen nicht besonders schön sein, sollten aber in etwa zügig 3.3 - Eingangsspannung gehen. Hast Du das schon angeschaut ?
Hab mal ein PAar Screenshots gemacht was denkt Du / IHR ? Normal ??
Um welches breakout handelt es sich ? Es gibt welche, die sind "pure 5V" und welche die sind 5V, haben aber für I2C level shifters auf 3.3v drin. (die "pure" 3.3V Version hätte ich gerne, aber noch nie als breakout gesehen).
Sonst lass doch mal ein I2C-scanner laufen - um zu schauen, ob das Teil wirklich da ist.
Sonst lass doch mal ein I2C-scanner laufen - um zu schauen, ob das Teil wirklich da ist.
Die Versorgung habe ich vom Arduino Regler genommen er gibt rund 4,8V Stabil aus, als Kondensator sollten eigentlich 100nf dazwischen, mit 0,1 war es aber etwas besser... aber wirklich nur etwas...
Mit 3,3V könnte ich aber auch noch mal Testen, vielleicht überfahre ich den Armen Kerl auch nur.

Das Teil ist eigentlich bemerkenswert doof, das reagiert auf Lageänderungen eigentlich gar nicht Aber Beine hoch und Beine runter auf den Tisch wie von Dir beschrieben könnte schon.................
mfg hw
mfg hw
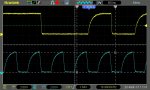
Hier mal die Messergebnisse:
Kanal 1 gelb ist SCL, Kanal 2 blau SDA Im SCL Signal sind auch immer wieder mal solch kleine Spitzen so zwischen durch, sieht meiner Meinung nach bescheiden aus, bin da aber kein Experte.