Guten Abend miteinander
V-Oktokopter, H-Kopter, X-Kopter, Spiderquadro - ich habe mittlerweile alle möglichen Formen an Koptern ausprobiert. Alle haben so ihre Vorteile und Nachteile. Mein nächstes Projekt soll wiederum einen H-Kopter ergeben. Diese sind relativ leicht zu bauen, einfach reparierbar und die Kamera filmt keine Propeller.
Nun, was soll der Kopter können?
Er soll eine Mobius, wahlweise mit oder ohne Brushlessgimbal, tragen können. 10'' Propeller sollten also eine sinnvolle Grösse darstellen, zudem habe ich passende Motoren und Propeller da.
So weit, so gut - hier der Anfang des Baus:

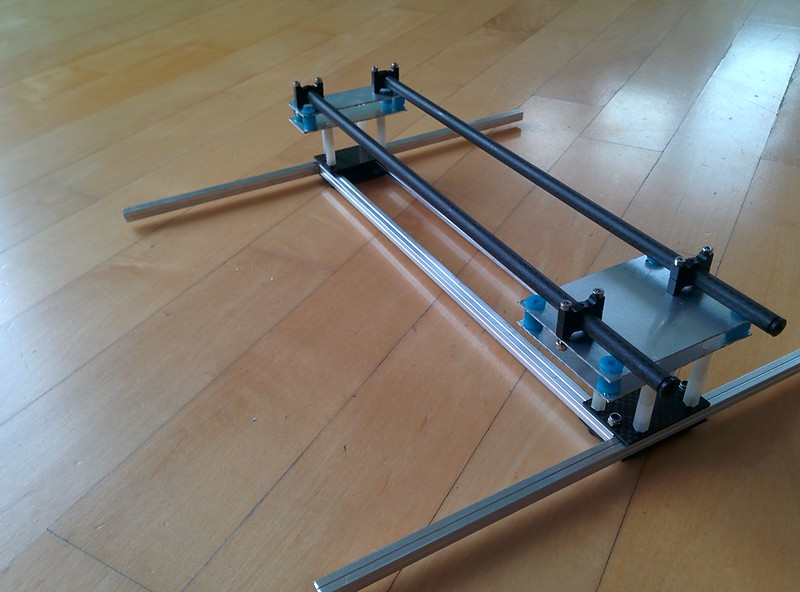
Ihr fragt euch, wozu die Aluplatten gut sein sollen? Das Frame soll eine komplett gedämpfte Ebene erhalten, auf welcher die Mobius, Videosender und evtl. der Akku platz finden können.
Nach einzeichnen, Bohren und provisorischem Zusammenbau zeigt sich die Form des Kopters
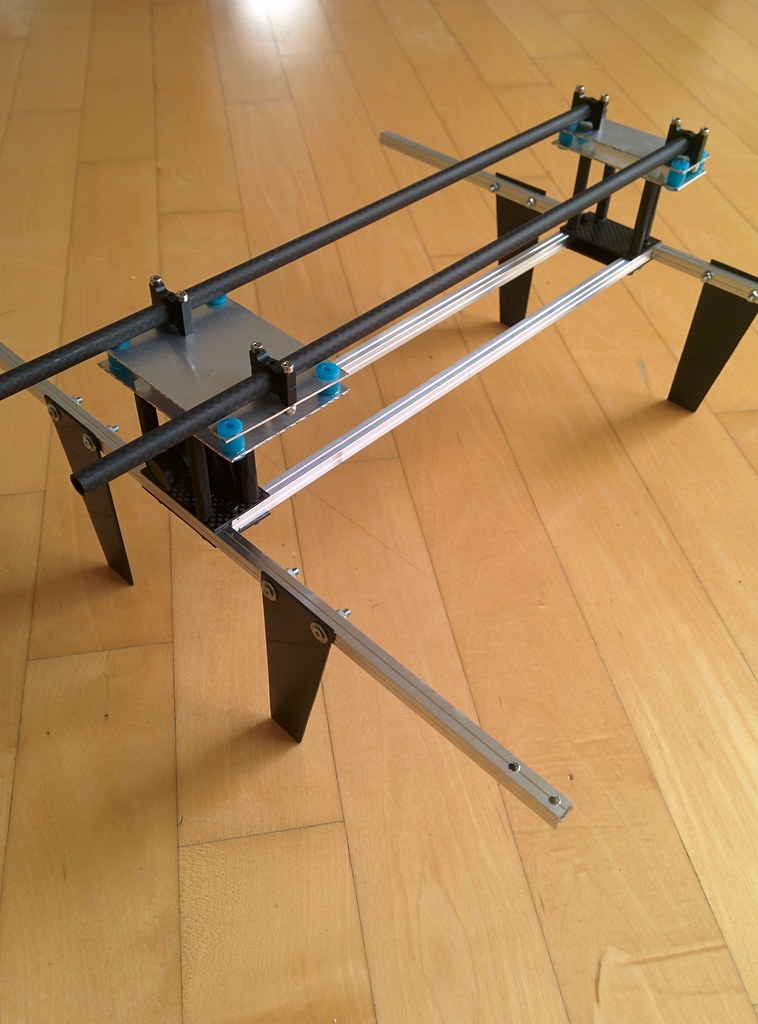
Nun, wenn ich hier keinen dummen Überlegungsfehler gemacht hätte, wäre es an der Zeit, die Motoren einzubauen. Doch leider sind die Alu-Profile zu kurz - ich habe vergessen, Platz für die Dämpfungsebene miteinzuberechnen. Die Propeller würden bis knapp zu der kleinen Carbonplatte reichen...
Aber kein Problem! Neue Aluprofile gekauft, Löcher gebohrt und Landegestell montiert - passt!
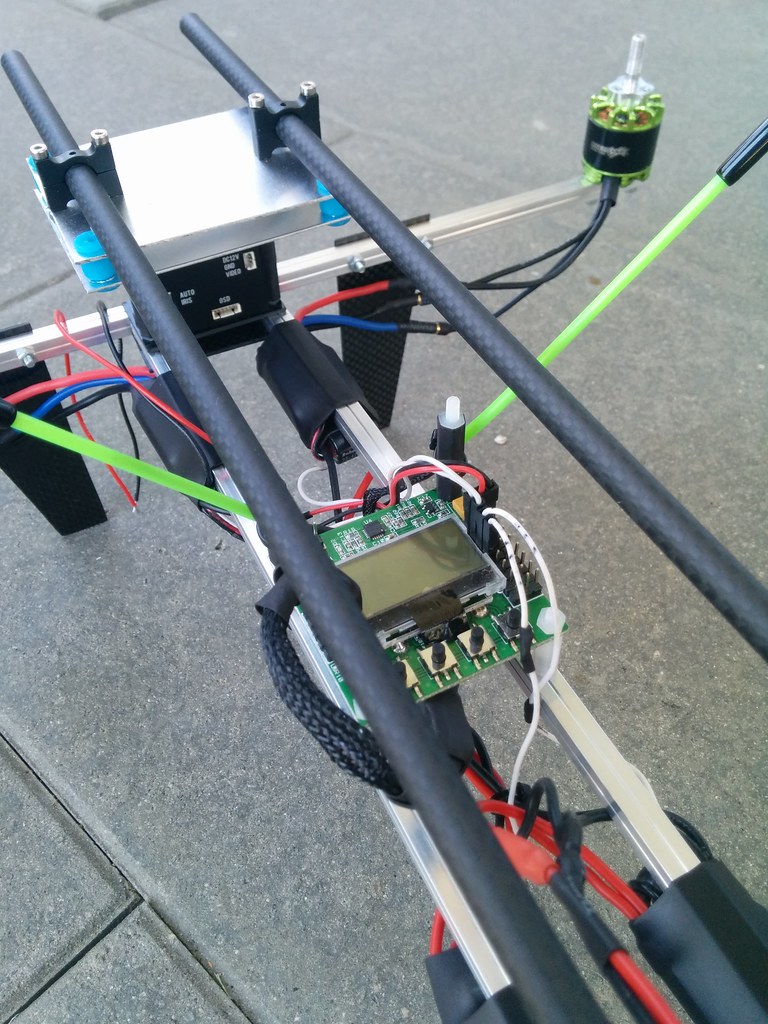
Die FPV-Kamera findet ihren Platz ganz vorne, zwischen den eingeschrumpften Nylon-Abstandhaltern.
Das Frame wiegt, inklusive Platinenkamera mit Metallgehäuse, rund 300 Gramm. Nicht gerade ein ferdlscher Leichtgewichtkopter, aber durchaus akzeptabel.

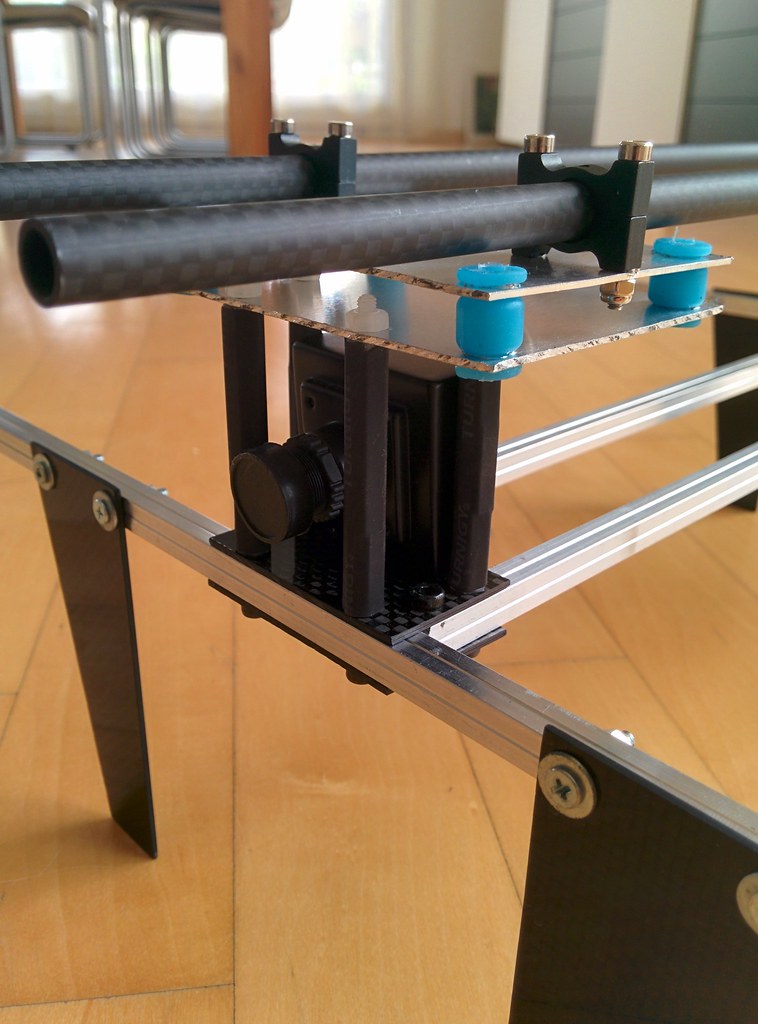
Detailaufnahme der Vibrationsdämpfung

Die Dämpfung besteht aus zwei Aluplatten vorne und hinten, zwischen welchen jeweils 4 kleine Gummidämpfer montiert sind. Verbunden sind die Platten mit 8mm Carbonrohren. Die Idee ist, dass die Vibrationsdämpfer gleichmässig belastet werden - vorne Gimbal, hinten Akku. Auch soll die gedämpfte Ebene einigermassen stabil sein und nicht allzu sehr herumschwabbeln.
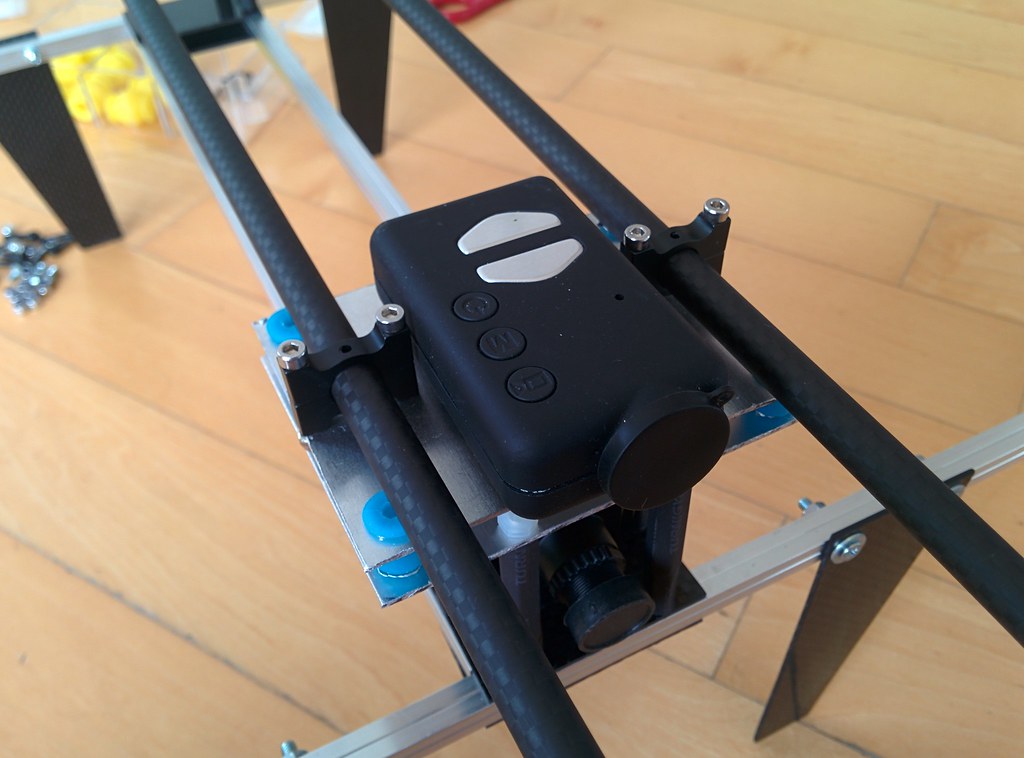
Der Clue ist aber die variablen Möglichkeiten. Die Mobius kann entweder direkt auf dem Frame befestigt werden...
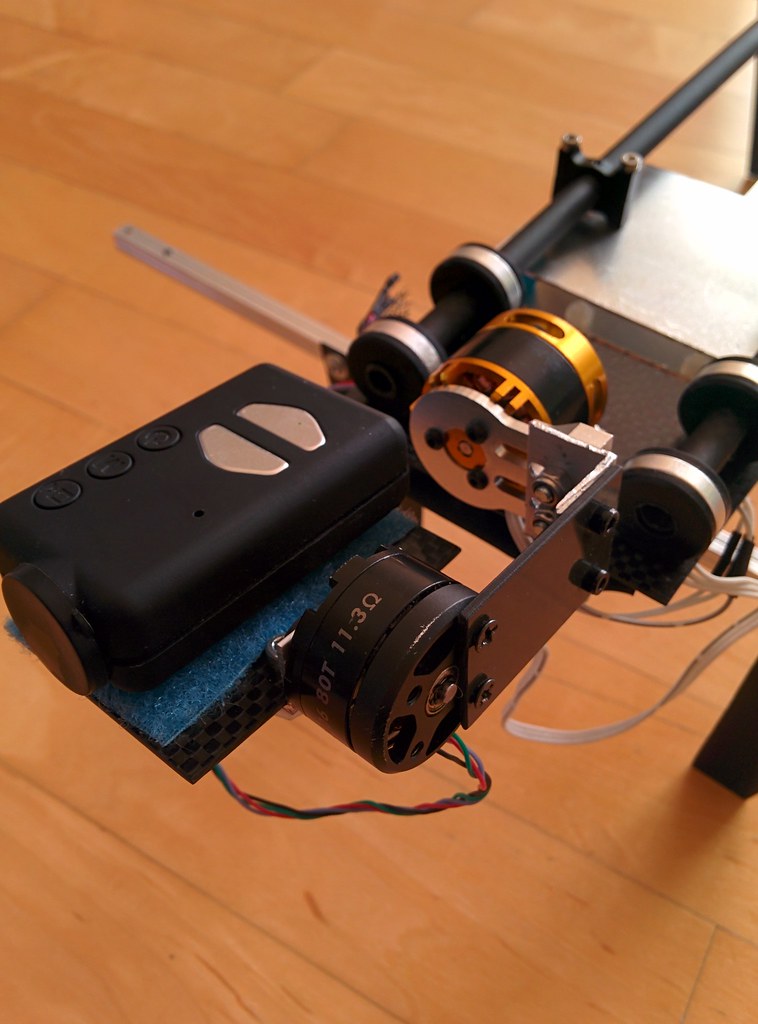
...oder aber auf einem Brushlessgimbal
Dieses besteht nebst Standardkomponenten aus einer Carbonplatte mit vier Vibrationsabsorbierenden Rohrschellen. Nicht, dass diese tatsächlich Vibrationen absorbieren sollen, aber das Gimbal lässt sich dadurch wunderbar auf die Rohre schieben und hält stramm - ohne eine einzige Schraube anzuziehen!
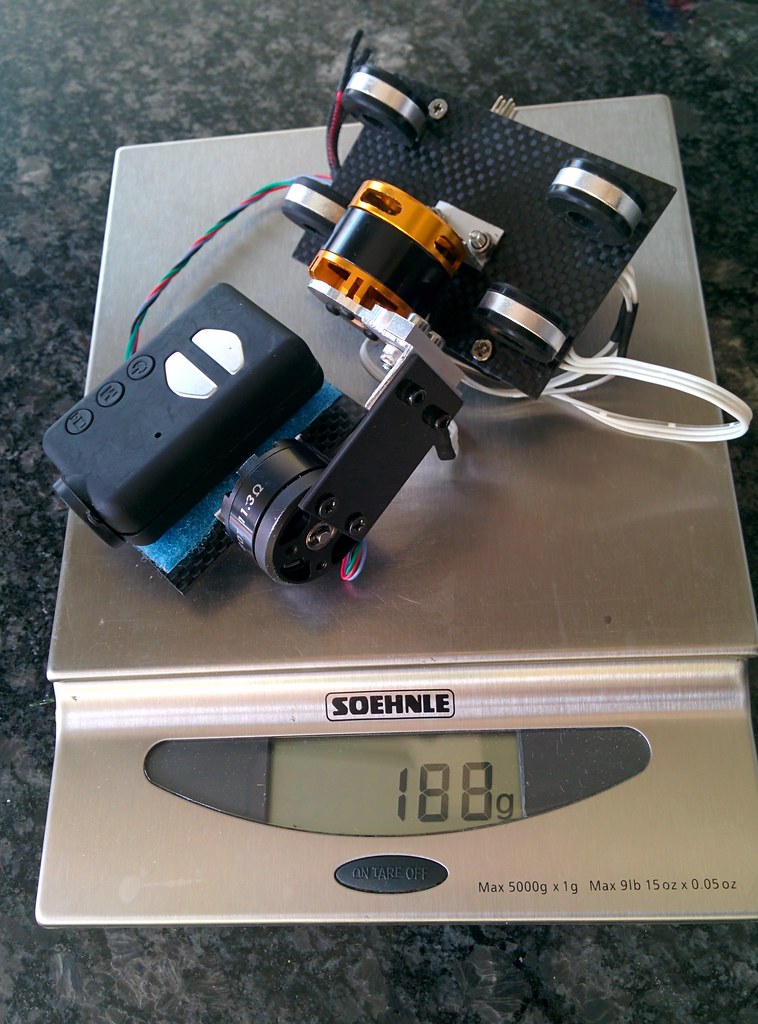
Inklusive Befestigung und Mobius wiegt das Ganze läppische 188g.
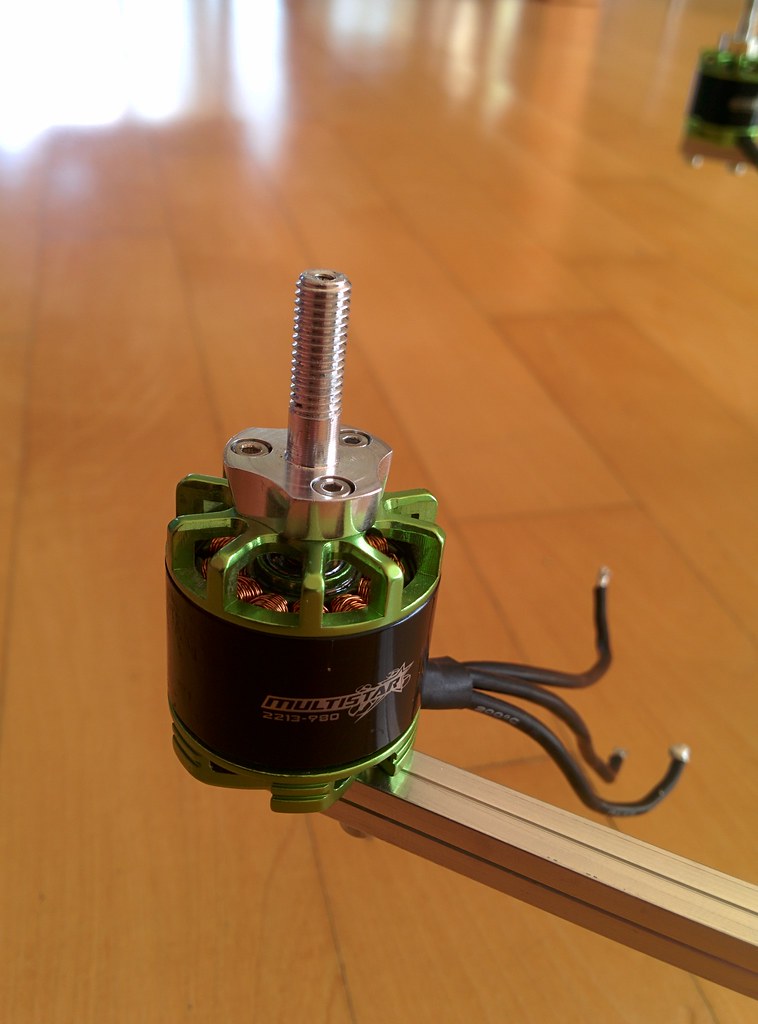
Multistarmotörchen mit 980Kv sollen in Verbindung mit 10'' Billig-Rctimer Propellern den benötigten Schub erzeugen.
Ich bin zwar kein Fan von unnötigen Steckverbindungen, aber bei diesem Projekt soll die Verbindung zwischen Regler und Motor doch per 3.5mm Goldstecker erfolgen. Dadurch wird vieles einfacher.
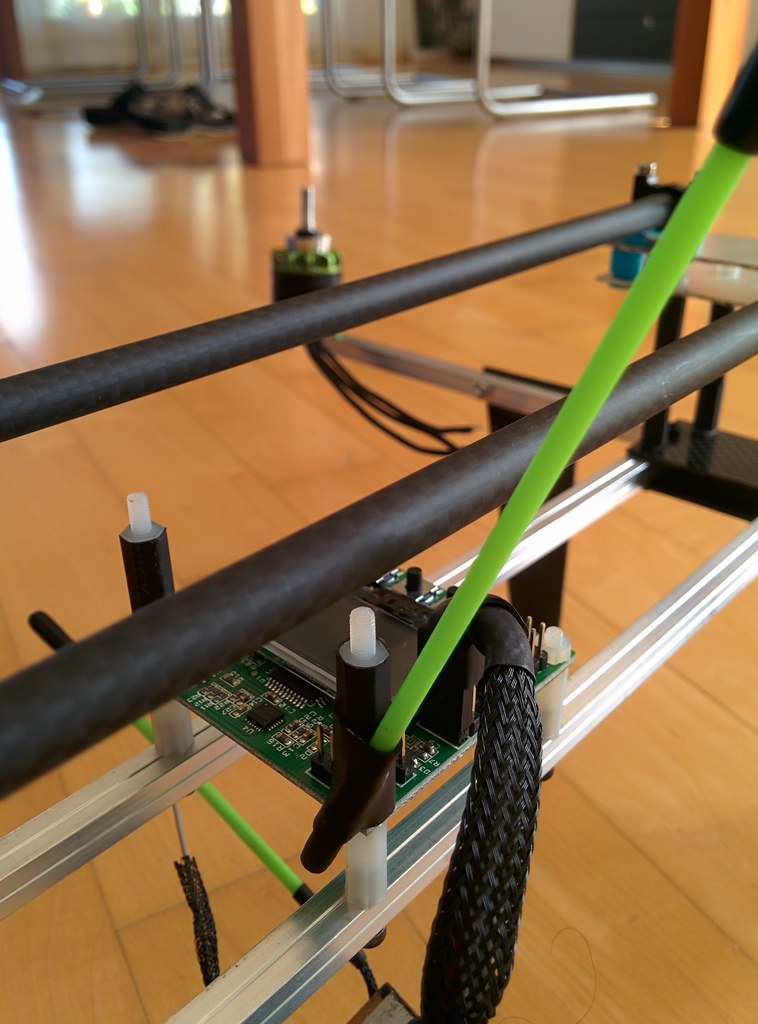
Zwischen den H-Mittelstegen ist etwa 4cm Platz. Das heisst, ein KK2.1 lässt sich ohne weitere Carbonplatte direkt mit dem Frame verschrauben.
Die Carbonrohre wirken als "überrollbügel" für Flightcontrol, Kamera, Videosender und Akku.
Morgen gehts ans FPV-Equipment und die restliche Elektronik.
Mit freundlichen Grüssen,
Christian
V-Oktokopter, H-Kopter, X-Kopter, Spiderquadro - ich habe mittlerweile alle möglichen Formen an Koptern ausprobiert. Alle haben so ihre Vorteile und Nachteile. Mein nächstes Projekt soll wiederum einen H-Kopter ergeben. Diese sind relativ leicht zu bauen, einfach reparierbar und die Kamera filmt keine Propeller.
Nun, was soll der Kopter können?
Er soll eine Mobius, wahlweise mit oder ohne Brushlessgimbal, tragen können. 10'' Propeller sollten also eine sinnvolle Grösse darstellen, zudem habe ich passende Motoren und Propeller da.
So weit, so gut - hier der Anfang des Baus:
Ihr fragt euch, wozu die Aluplatten gut sein sollen? Das Frame soll eine komplett gedämpfte Ebene erhalten, auf welcher die Mobius, Videosender und evtl. der Akku platz finden können.
Nach einzeichnen, Bohren und provisorischem Zusammenbau zeigt sich die Form des Kopters
Nun, wenn ich hier keinen dummen Überlegungsfehler gemacht hätte, wäre es an der Zeit, die Motoren einzubauen. Doch leider sind die Alu-Profile zu kurz - ich habe vergessen, Platz für die Dämpfungsebene miteinzuberechnen. Die Propeller würden bis knapp zu der kleinen Carbonplatte reichen...
Aber kein Problem! Neue Aluprofile gekauft, Löcher gebohrt und Landegestell montiert - passt!
Die FPV-Kamera findet ihren Platz ganz vorne, zwischen den eingeschrumpften Nylon-Abstandhaltern.
Das Frame wiegt, inklusive Platinenkamera mit Metallgehäuse, rund 300 Gramm. Nicht gerade ein ferdlscher Leichtgewichtkopter, aber durchaus akzeptabel.
Detailaufnahme der Vibrationsdämpfung
Die Dämpfung besteht aus zwei Aluplatten vorne und hinten, zwischen welchen jeweils 4 kleine Gummidämpfer montiert sind. Verbunden sind die Platten mit 8mm Carbonrohren. Die Idee ist, dass die Vibrationsdämpfer gleichmässig belastet werden - vorne Gimbal, hinten Akku. Auch soll die gedämpfte Ebene einigermassen stabil sein und nicht allzu sehr herumschwabbeln.
Der Clue ist aber die variablen Möglichkeiten. Die Mobius kann entweder direkt auf dem Frame befestigt werden...
...oder aber auf einem Brushlessgimbal
Dieses besteht nebst Standardkomponenten aus einer Carbonplatte mit vier Vibrationsabsorbierenden Rohrschellen. Nicht, dass diese tatsächlich Vibrationen absorbieren sollen, aber das Gimbal lässt sich dadurch wunderbar auf die Rohre schieben und hält stramm - ohne eine einzige Schraube anzuziehen!
Inklusive Befestigung und Mobius wiegt das Ganze läppische 188g.
Multistarmotörchen mit 980Kv sollen in Verbindung mit 10'' Billig-Rctimer Propellern den benötigten Schub erzeugen.
Ich bin zwar kein Fan von unnötigen Steckverbindungen, aber bei diesem Projekt soll die Verbindung zwischen Regler und Motor doch per 3.5mm Goldstecker erfolgen. Dadurch wird vieles einfacher.
Zwischen den H-Mittelstegen ist etwa 4cm Platz. Das heisst, ein KK2.1 lässt sich ohne weitere Carbonplatte direkt mit dem Frame verschrauben.
Die Carbonrohre wirken als "überrollbügel" für Flightcontrol, Kamera, Videosender und Akku.
Morgen gehts ans FPV-Equipment und die restliche Elektronik.
Mit freundlichen Grüssen,
Christian
") ...das gimbal hast du selber gebaut oder?
...das gimbal hast du selber gebaut oder?