
Hallo
Ich nutze auf meinem diatone white sheep ein APM Mini inkl 3DR LEA6 V2.1. Der Copter fliegt in allen nicht unterstützen Flugmodes perfekt. Jedoch vor allem im Loiter wird er so unkontrollierbar, dass zwei von 3 Flügen im Acker endeten. Ich nutze weiter APM’s ohne Probleme.
Nach Recherche bin ich darauf gekommen, das ggf der interne Kompass Probleme machen kann, Da es in meinem Rahmen recht eng zu geht, und die Regler nahe am FC sitzen, fühlte ich mich bestätigt.
Doch irgendwas stimmt hier nicht:
Meine Brücke JP2 ist unterbrochen. Bedeutet, der Board Kompass ist außer betrieb, richtig?
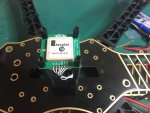
Ich habe die Anschlüsse am ext. Kompass fest verlötet (siehe Bild). Also 5V, RX, TX, GND, SCL und SDA.
Sollte somit der externe Kompass voll genutzt sein?
In einem Youtube Video habe ich gesehen dass alle Anschlüsse vom ext. Kompass aufs Board geführt werden sollen/müssen. Habe ich hier einen Denkfehler?
Im Anhang einige Bilder zur Erläuterung...



Danke,
Michael
Ich nutze auf meinem diatone white sheep ein APM Mini inkl 3DR LEA6 V2.1. Der Copter fliegt in allen nicht unterstützen Flugmodes perfekt. Jedoch vor allem im Loiter wird er so unkontrollierbar, dass zwei von 3 Flügen im Acker endeten. Ich nutze weiter APM’s ohne Probleme.
Nach Recherche bin ich darauf gekommen, das ggf der interne Kompass Probleme machen kann, Da es in meinem Rahmen recht eng zu geht, und die Regler nahe am FC sitzen, fühlte ich mich bestätigt.
Doch irgendwas stimmt hier nicht:
Meine Brücke JP2 ist unterbrochen. Bedeutet, der Board Kompass ist außer betrieb, richtig?
Ich habe die Anschlüsse am ext. Kompass fest verlötet (siehe Bild). Also 5V, RX, TX, GND, SCL und SDA.
Sollte somit der externe Kompass voll genutzt sein?
In einem Youtube Video habe ich gesehen dass alle Anschlüsse vom ext. Kompass aufs Board geführt werden sollen/müssen. Habe ich hier einen Denkfehler?
Im Anhang einige Bilder zur Erläuterung...
Danke,
Michael

