Hallo
nach längerer Zeit bin ich ENDLICH dazu gekommen den ersten Speedsensor in Betrieb zu nehmen.
Da das ganze Meßsystem erst 2 Tage vor dem (Modellflug) Urlaub fertig wurde, konnte ich noch nicht alle Funktionen implementieren (Kompensation etc..), aber zumindesten die reine Airspeedmessung, das Vario & GPS in Betrieb nehmen.
Die "Besonderheit" dabei war das Selbstbau Prandtl-Rohr.
Aus Gründen der Transportabilität ("Aneck-Gefahr") wollte ich eine abnehmbare Variante einsetzen.
Als Probant musste ein Topmodell-Ventus herhalten.
Da die Schlauchlängen zwischen Sonde und Differenzdrucksensor mehr als 1Meter betrugen, und ich auch nicht ganz sicher war, ob das "System" wirklich dicht ist, war ich etwas skeptisch, ob das alles so überhaupt funktionierte.
Schliesslich war es mein erster Versuch.


Die Sonde habe ich beim "scale" Segler erst einmal vorbildgetreu in die Dämpfungsflosse integriert.
Für Zwecksegler mit schlanken Flossen bzw. V-Leitwerk steht eine gebogene Variante in den Startlöchern, die in etwa auf Höhe der Flächen bzw kurz dahinter aus dem Rumpf herausragen soll, siehe Bilder.
Funktionsweise des Stecksystems ist hoffentlich auch den Bildern zu entnehmen.

Das Rohr hat 4,5mm Aussendurchmesser, auf dem Foto habe ich das schlankere Jeti Rohr zum Vergleich beigelegt.
statischer Druck wird aus 8 Bohrungen a 0,5mm entnommen,
Öffnungsdurchmesser für den dynamischer Druck beträgt 1,5 mm.
Der Statische Druck für Vario/Höhenmessung wird auf der Platine über einen "Bypass" entnommen.
Wie Bernd bereits mal beschrieben hat, "forme" ich mir einen Schrumpfschlauch auf einem Holzvierkant, allerdings durchbohre ich ihn um ein Ms-Rohr hindurchzustechen.
Das MS-Rohr hat im Inneren des Schlauchs eine kleine Öffnung ausgefräst & übergibt dadurch den static Druck an den Sensor.
Der Schrumpfschlauch wird dann mit dem MS-Röhrchen zusammen oben mit einem 0,3mm GFK Plättchen gedeckelt (Sekundenkleber) und auf das Gehäuse des Drucksensors fixiert (ebenfalls Sek.Kleber).
Danach dichte ich dieses "Schrumpfschlauch-Gehäuse" komplett mit Flüssig-Gummi (Plasti-Dip) ab.
Auf der einen Seite des Röhrchens kommt dann der Anschluß-Schlauch des static Ports, das andere Ende wird an den Diffdrucksensor angeschlossen..
Für die Druckübertragung habe ich mich auf Silikonschläuche mit möglichst kleinem Durchmesser geeinigt (ID 1mm).
Schliesslich soll lediglich die Druckänderung schnell übertragen werden, Volumen muss da nicht durch, soweit jedenfalls meine newbee-logik.
Ich war mir nicht sicher ob das wirklich so funtzen würde.
btw:
Viele Anbieter (meist aus dem Anglerzubehör) bieten Schläuche an, die innen noch Talkumreste besitzen.
Um den Drucksensor nicht zu pudern habe ich länger suchen müssen, um saubere Schläuche zu finden.

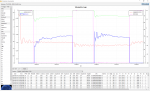
Als Proof of Concept hatte ich mir überlegt, die GPS-Höhenmessung mit der barometrischen Messung zu vergleichen.
meine Annahme ist, dass, wenn die Barometrische Messung keine grossen Abweichungen zeigt, das System mit den langen Schläuchen die Druckänderung korrekt weiterleitet und das System trotz abnehmbarer Sonde dicht ist.
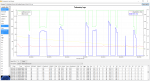
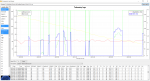
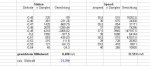
Hier nun die Gegenüberstellung der beiden Messungen:
Dass ist ERHEBLICH besser als ich gehofft hatte,
Unter nomalen Umständen liegt die Abweichung unterhalb von einem Meter !!!
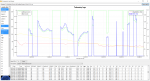
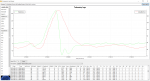
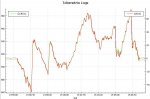
"Unnormale" Umstände sind z.B. Loops.
Das bekommt das GPS System gar nicht wirklich mit, vergleicht man dann aber Airspeed & Baro-Höhe zeigt sich, dass diese (baro-) Messung wohl tatsächlich die zuverlässigere ist !
Auf dem GPS System wurde die Höhenänderung während eines Loops gar nicht mitaufgezeichnet.
Erst einige Sekunden nach dem Loop waren die Messungen wieder deckungsgleich.
Evtl bekommt das GPS durch die plötzliche Fluglageänderung in den Rückenflug kein sauberes Empfangssignal.
Unter dem Strich gilt:
Hallo Bernd !
Danke für deine Unterstützung, und für die Präsentation dieses Messystems hier,
wird bestimmt noch eine Menge Spass bereiten !
Jetzt kann's in die nächste Runde gehen....

") ). Ist noch jemand am Messen zur Zeit? Erfahrungsaustauch gerne auch per Mail.
). Ist noch jemand am Messen zur Zeit? Erfahrungsaustauch gerne auch per Mail.