
Hallo Leute,
vor kurzem habe ich mir meinen ersten RaceCopter geplant, zusammengebaut und anschließend getestet.
Meine Konfiguration ist folgende:
Der Maidenflug (gestern) hat, bis auf den nachfolgend beschriebenen Fehler, wunderbar funktioniert, war überrascht und erfreut zugleich")
Folgendes Problem bekomme ich leider bisher noch nicht in den Griff:
Der Kopter fliegt außerordentlich gut, sehr smooth und alles scheint soweit zu passen- natürlich müssen die PID´s noch ordentlich eingestellt werden, aber für den Anfang wirklich TOP! Nachdem ersten Start, der wirklich gut gelaufen ist (etwas ängstlich ist vermutlich normal, will ja nicht gleich wieder zu basteln anfangen...), beginnt der Kopter innerhalb von Millisekunden zu drehen ("bisher" ausschließlich beim Start bzw. bei der Landung).
Allerdings "dreht" er sich so schnell, dass er dabei jedes mal Abstürzt. Nun habe ich es eben, bevor es dunkel wird, noch einmal getestet, es passiert nahezu bei jeder Landung (manchmal klappt auch das tadellos), es sei denn ich schalte ihn kurz vorm aufsetzen einfach ab (ARM = off), dann setzt er natürlich auf -> und ich kann ihn sofort wieder starten.
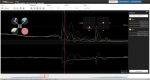
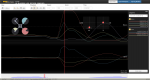
Der Blackbox zu urteilen drehen zwei bzw. ein Motor auf 100%, den Motor habe ich bereits ausgetauscht, weiterhin gleiches Problem, ggf. der Regler? Möglich wäre auch ein Defekt der Steuerungsgyros, aber diese scheinen mir nicht das Problem zu sein, denn wenn ich die Gyro´s in Betaflight teste und den Kopter bewege reagieren diese perfekt, ohne unerklärliche Schwankungen...
Folgende Zusatzinformationen kann ich euch geben:
Also, soweit erstmal, falls ich noch etwas vergessen haben sollte, werde ich dieses kurzfristig hinzufügen.
Schon mal vorab, vielen Dank für eure Hilfe, wäre klasse wenn einer eine Lösung oder zumindest eine solche Ansatz dazu findet..
PS: In einem der angehängten Bilder gibt der Gyro einen Wert von 516deg/s raus, das scheint mir viel zu viel zu sein, daher hierzu auch die Tabelle im Anhang!
Vielen Dank,
Lg. Blacktime
vor kurzem habe ich mir meinen ersten RaceCopter geplant, zusammengebaut und anschließend getestet.
Meine Konfiguration ist folgende:
- Realacc X210
- DYS SE2205 Race Edition PRO
- MS25A RacerStar
- SP Racing F3 Acro mit Betaflight 3.2
- Taranis X9D Plus Sender und FrSky Empfänger X4RSB per SBUS angebunden
- Runcam Eagle hängt am PDB von Matek
- Aomway 25mw Sender + LC Filter, hängt am PDB von Matek
- MinimOSD micro, mit eigenem BEC und LC-Filter, da ansonsten das Bild dauernd verschwand, scheint jedes Mal neuzustarten.
Der Maidenflug (gestern) hat, bis auf den nachfolgend beschriebenen Fehler, wunderbar funktioniert, war überrascht und erfreut zugleich
Folgendes Problem bekomme ich leider bisher noch nicht in den Griff:
Der Kopter fliegt außerordentlich gut, sehr smooth und alles scheint soweit zu passen- natürlich müssen die PID´s noch ordentlich eingestellt werden, aber für den Anfang wirklich TOP! Nachdem ersten Start, der wirklich gut gelaufen ist (etwas ängstlich ist vermutlich normal, will ja nicht gleich wieder zu basteln anfangen...), beginnt der Kopter innerhalb von Millisekunden zu drehen ("bisher" ausschließlich beim Start bzw. bei der Landung).
Allerdings "dreht" er sich so schnell, dass er dabei jedes mal Abstürzt. Nun habe ich es eben, bevor es dunkel wird, noch einmal getestet, es passiert nahezu bei jeder Landung (manchmal klappt auch das tadellos), es sei denn ich schalte ihn kurz vorm aufsetzen einfach ab (ARM = off), dann setzt er natürlich auf -> und ich kann ihn sofort wieder starten.
Der Blackbox zu urteilen drehen zwei bzw. ein Motor auf 100%, den Motor habe ich bereits ausgetauscht, weiterhin gleiches Problem, ggf. der Regler? Möglich wäre auch ein Defekt der Steuerungsgyros, aber diese scheinen mir nicht das Problem zu sein, denn wenn ich die Gyro´s in Betaflight teste und den Kopter bewege reagieren diese perfekt, ohne unerklärliche Schwankungen...
Folgende Zusatzinformationen kann ich euch geben:
- PID Loop 4 kHz, bereits verstellt auf 2kHz, keine Besserung
- Gyro 4kHz, bereits verstellt auf 2kHz, keine Besserung.
- DShot 600, jedoch bereits Dshot 300 und auch Oneshot versucht, immer der gleich Fehler.
- Motoren habe ich nun mehrfach neu angelernt, keine Besserung, mit der Betaflight-Software funkioniert alles perfekt.
- Die Blackboxfile (ein Ausschnitt als Bild) hänge ich anliegend an, ich denke damit erklärt sich das Problem von selbst, ich gebe kein bzw. nahezu null Throttle und der Kopter geht ab wie´n Zäpfchen, dreht sich und stürzt.
- PID´s alle auf null gesetzt, bis auf die "P-Werte" welche alle auf 15 standen, fliegt damit natürlich sehr schlecht, aber er fliegt und stürzt genauso ab wie zuvor.
Also, soweit erstmal, falls ich noch etwas vergessen haben sollte, werde ich dieses kurzfristig hinzufügen.
Schon mal vorab, vielen Dank für eure Hilfe, wäre klasse wenn einer eine Lösung oder zumindest eine solche Ansatz dazu findet..
PS: In einem der angehängten Bilder gibt der Gyro einen Wert von 516deg/s raus, das scheint mir viel zu viel zu sein, daher hierzu auch die Tabelle im Anhang!
Vielen Dank,
Lg. Blacktime
Anhänge
-
 189,7 KB Aufrufe: 17
189,7 KB Aufrufe: 17 -
 167,3 KB Aufrufe: 18
167,3 KB Aufrufe: 18 -
 112,4 KB Aufrufe: 17
112,4 KB Aufrufe: 17







