
Hi Leute,
da mein AQ6 Board neulich lebe wohl gesagt hat und auch eine Reparatur daran nicht ändern konnte, bin ich jetzt stolzer Besitzer eines M4 Boards. Ich konnte mich jedoch bisher leider nicht sehr tief gehend mit diesem beschäftigen und finde einige Dinge nicht ganz eindeutig. Um nicht noch ein Board in die ewigen Jagdgründe schicken will, wollte ich einige Kleinigkeiten mal kurz abklären.
Aufbau:
Quatro X
6S
M4V2r1
AQ M4N4 Expander 1.1
ESC32v3
T-Motor U8Pro 170kv
Graupner mx-20
Der Versuchsaufbau sieht erst einmal so aus:
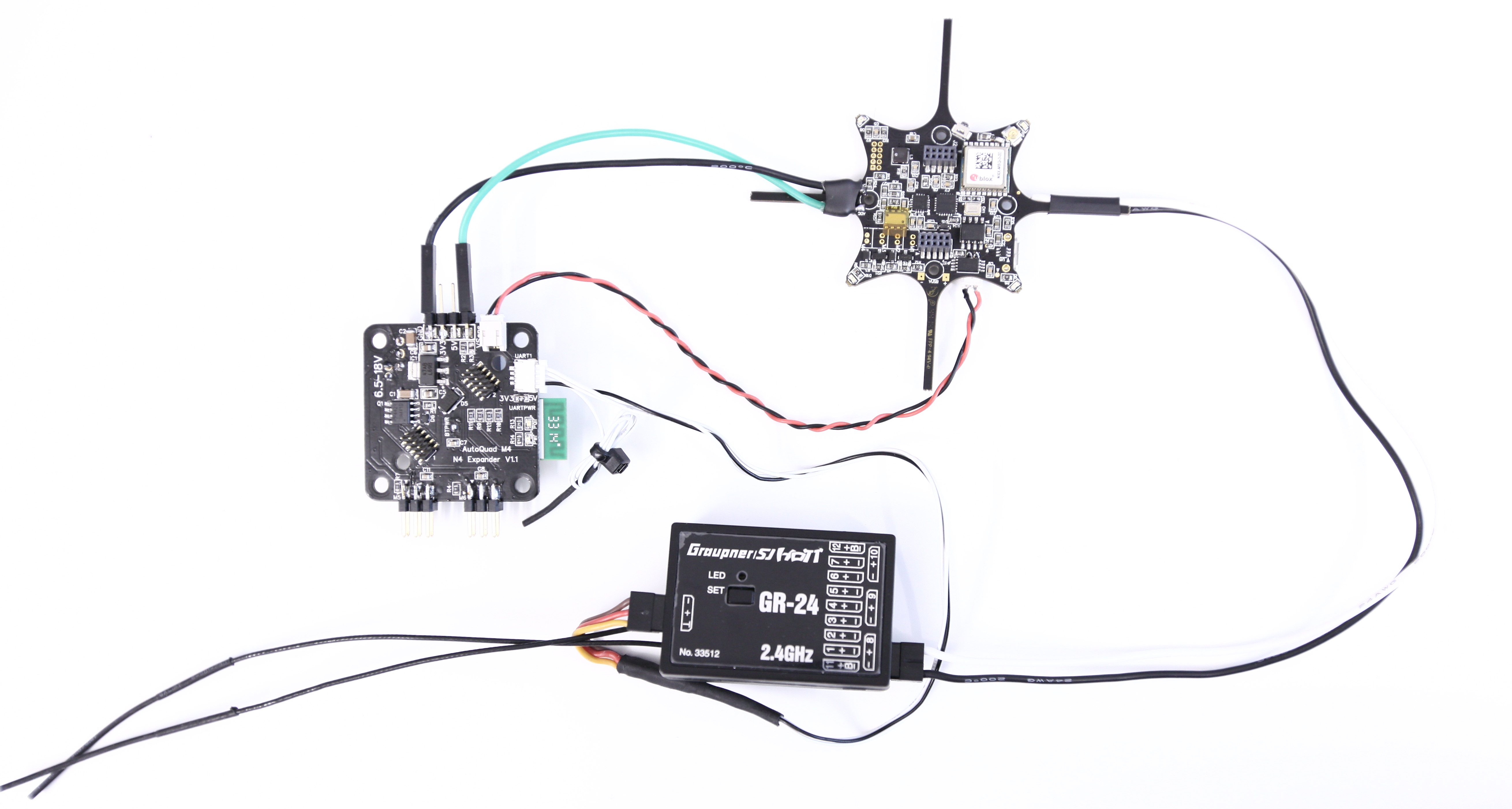
Ist das soweit richtig?
Wenn ich das richtig verstanden habe, dann ist UART und Bluetooth gleichzeitig nicht möglich. Entsprechend wird es nie möglich sein in dieser Kombination bspw. eine Tablet und eine HoTT System gleichzeitig mit (Telemetrie-)Daten zu versorgen. Richtig?
Bei dem gelieferten Expanderboard fehlten leider die Befestigungsschraubensockel (nennt man die so?) zur Befestigung der beiden Boards miteinander. Weiß jemand, wo man diese herbekommt?

Wenn ich jetzt ein Quadsystem mit externen ESCs und externer Radio an die Platine anschließen will, nutze ich für die ESCs am Besten die Ausgänge M5-M8 und schließe die Radio am Besten so wie abgebildet an. Auch richtig?
Desweiteren plane ich den Anschluss von vier Servos. Das Steuerungssignal sollte von der AQ-Platine kommen und via Verteilerboard aufgesplittet werden. Wo bekomme ich ein Signal, welches ich bspw. programmieren oder voa Poti steuern kann am Besten aus der Platine?
Ich hoffe, dass ich mit verständlich ausdrücken konnte.
Vielen Dank schonmal vorab für eure Antworten.
VG.
TheBone
da mein AQ6 Board neulich lebe wohl gesagt hat und auch eine Reparatur daran nicht ändern konnte, bin ich jetzt stolzer Besitzer eines M4 Boards. Ich konnte mich jedoch bisher leider nicht sehr tief gehend mit diesem beschäftigen und finde einige Dinge nicht ganz eindeutig. Um nicht noch ein Board in die ewigen Jagdgründe schicken will, wollte ich einige Kleinigkeiten mal kurz abklären.
Aufbau:
Quatro X
6S
M4V2r1
AQ M4N4 Expander 1.1
ESC32v3
T-Motor U8Pro 170kv
Graupner mx-20
Der Versuchsaufbau sieht erst einmal so aus:
Ist das soweit richtig?
Wenn ich das richtig verstanden habe, dann ist UART und Bluetooth gleichzeitig nicht möglich. Entsprechend wird es nie möglich sein in dieser Kombination bspw. eine Tablet und eine HoTT System gleichzeitig mit (Telemetrie-)Daten zu versorgen. Richtig?
Bei dem gelieferten Expanderboard fehlten leider die Befestigungsschraubensockel (nennt man die so?) zur Befestigung der beiden Boards miteinander. Weiß jemand, wo man diese herbekommt?
Wenn ich jetzt ein Quadsystem mit externen ESCs und externer Radio an die Platine anschließen will, nutze ich für die ESCs am Besten die Ausgänge M5-M8 und schließe die Radio am Besten so wie abgebildet an. Auch richtig?
Desweiteren plane ich den Anschluss von vier Servos. Das Steuerungssignal sollte von der AQ-Platine kommen und via Verteilerboard aufgesplittet werden. Wo bekomme ich ein Signal, welches ich bspw. programmieren oder voa Poti steuern kann am Besten aus der Platine?
Ich hoffe, dass ich mit verständlich ausdrücken konnte.
Vielen Dank schonmal vorab für eure Antworten.
VG.
TheBone
") Alternativ. M2 Kunstoffschrauben mit muttern besorgen.
Alternativ. M2 Kunstoffschrauben mit muttern besorgen.

 ). Damit diese beiden gleichzeitig funktionieren braucht man zwei UARTs.
). Damit diese beiden gleichzeitig funktionieren braucht man zwei UARTs.
