Baubericht: Das Tagebuch eines Hexacopters
Vorwort:
Im Frühjahr 2012 hatte ich mir bereits das Ziel gesetzt einen großen Copter zu bauen der lange Flugzeiten bietet, ruhig fliegt und in erster Linie eine GoPro heben kann, später dann auch eine etwas größere Cam.
Das Ziel mit der Flugzeit wurde auch erreicht, aber der Copter war sehr unruhig. Darauf hin habe ich von Ferdl hier aus dem Forum den Tip bekommen andere Motoren zu verbauen......

[HR][/HR]
Aus vielem Überlegen und Planen ist nun folgendes Entstanden:
Das Tagebuch eines Hexacopters
Die Anforderungen an den Copter:
-Ruhige Kamera-Plattform
-lange Flugzeit
-FPV-Fähig
[HR][/HR]
Direktlinks:
Baubericht Teil 1: (in diesem Beitrag) --- Planungsphase / Setup / Rohbau / Grundverkabelung
Baubericht Teil 2: Klick --- Liposchienen / GPS / Erstflug / Montage der 22N24P HP4114 Motoren
Baubericht Teil 3: Klick --- FPV-Equipment / Gimbal
Baubericht Teil 4: (in Arbeit)
[HR][/HR]
Video zum Erstflug: >>>Klick<<<
Video mit Gimbal: >>>Klick<<<
[HR][/HR]
Entstandene Luftfotos:
>>zum Album<<
[HR][/HR]
Das Setup:
Motoren:
5010-14 360KV >>>Klick<<<
22N24P HP4114-350KV >>>Klick<<< .......... Kurz-Vorstellung der HP4114-Motoren: >>>Klick<<<
Regler:
Mystery 40Amp geflasht mit SimonK
Lipo:
2x 5000er 6S
2x 5800er 6S
Props zum testen:
6 Stück 15,7 von Smartdrones
6 Stück 1575 von Foxtech
6 Stück 1555 von Foxtech
6 Stück 1755 von Foxtech
Schwebestrom:
20 bis 22 Amp (mit beiden Motorentypen in etwa gleich)
Steuerung:
-DJI Naza M mit GPS
[HR][/HR]
Die Ausmaße des Copters:
Abstand von Motorwelle zu Motorwelle: 1 Meter
Gesamtdruchmesser von Auslegerende zu Auselgerende: 113 cm
Duchmesser der Centerplates: 20 cm
Gewicht des Rahmens mit Motoren, Regler und Verkabelung beträgt 2450 Gramm
Abfluggewicht mit den 5010-14 360KV Gesamt: 4200 Gramm (Ohne FPV und sonstigem Equipment)
Abfluggewicht mit den 22N24P HP4114-350KV Gesamt: 4580 Gramm (Ohne FPV und sonstigem Equipment)
[HR][/HR]
Rechlticher Hintergrund:
Hier ein paar Infos zu meinem Hexacopter-Projekt aus rein rechtlicher Sicht:
Ich habe mehrere Telefonate mit unserer Landes-Luftfahrtbehörde Oberbayern geführt und herausgefunden das es zumindest hier in Bayern relativ problemlos ist eine Aufstiegsgenehmigung über 5 Kg zu bekommen.
Ich musste eine formlose Mail an den zuständigen Herren schreiben das ich diese benötige. Nun bekomme ich für den privaten Gebrauch eine Aufstiegsgenehmigung für 2 Jahre für komplett Bayern (wo ich mich zu 99,999 % zum fliegen aufhalte) mit der Genehmigung "Luftaufnahmen" für den privaten Gebrauch zu machen.
Die Probleme gehen erst los, wenn man das gewerblich machen will. Dann benötigt man zusätzlich zu der zweijährigen Aufstiegsgenehmigung für jeden Foto-Standort eine Einzelaufstiegsgehnehmigung.
Das Interessante ist: Wenn man einen Copter unter 5 kg betreibt, bekommt man eine Aufstiegs- und Fotogenehmigung für 2 Jahre ausgestellt für gewerbliche Zwecke....
Wenn man das ganze nicht gewerblich betreiben will und unter 5 Kg bleibt, ist das alles sowieso ohne Relevants....
Alles leicht verplant ;D
Da ich mich aber immer bemühe alles so legal wie möglich zu halten, habe ich diese Aufstiegsgenehmigung beantragt.
Ein zweiter Punkt ist der Versicherungsschutz. Hier muss jeder für sich abklären ob Modelle und in diesem Fall speziell Multicopter über 5 Kg mitversichert sind.
Eine extra Versicherung musste in meinem Fall nicht abgeschlossen werden, da beim DMO Modelle bis 150 Kg (Multicopter eingeschlossen) versichert sind. Sobald ich die gesetzlichen Auflagen einhalte (was mit meiner Aufstiegsgenehmigung der Fall ist) bin ich versichert und muss nichts zusätzlich abschließen.
Ich hoffe das hilft dem ein oder anderen der vor dem selben Problem steht wie ich es hatte und keinen Plan hat was dies angeht ;D
#########################################################
Beginn der Planung im Früh-Sommer 2012
Zuerst wurde gezeichnet das dass CAD glühte und heraus kam das hier:








Da ich mich im Sommer und Herbst mehr auf die FPV-Fliegerrei mit Flächenmodellen konzentriert hatte, kam ich nur sporadisch zum zeichnen und planen des neuen Hexas.
Die letzten paar Wochen habe aber alle Teile zusammen bestellt die erstmal benötigt werden und die Materialschlacht kann beginnen.
#########################################################
Beginn der Arbeiten am 23.12.2012
-Die ersten Teile fielen aus der Fräse
-Die 25mm CFK-Rohre wurden auf Länge gebraucht. Ein Rohr ist 49,5 cm lang.
-Die beiden Centerplates haben einen Materialstärke von 2mm.









Heute ist leider auch meine Fräse ausgefallen und ich kann, bis der Fehler festgestellt und repariert ist nicht mehr weiterfräsen
Als nächstes wollte ich die Mystery 40 Regler mit SimonK flashen. Sowas vertreibt die Zeit ganz gut bis die Fräse wieder läuft.
#########################################################
Tagebucheintrag vom 28.12.2012:
(es geht endlich weiter)
Heute ging es wieder etwas weiter so dass endlich mal der Rohbau fertig wird.
Hierzu habe ich der Fräse die restlichen Teile entlockt. Das CFK flog nur so durch die Gegend und raus fiel dies hier:


Das Zusammenbauen dauert dann doch etwas länger als das Fräsen, aber es hat sich gelohnt und die Teile passen alle wie angegossen


Die Motoren in Reih und Glied vor ihrer Befestigung...

Der Rohbau mit angeschraubten Motoren ist dann schon mal fertig und die Ausmaße des Hexas werden sichtbar. Es handelt sich schließlich um reine 15 Zoll (40cm) Propeller ;D




#########################################################
Tagebucheintrag vom 05.01.2013:
Heute begann die Oberbayerische Löt-Weltmeisterschaft im Hexacopter-Electronik-Löten
Ich dachte eigentlich, ich habe noch eine Stromverteiler-Platine von Flyduino rumliegen. Dem war aber nicht so. Nun hatte ich die Möglichkeit fast eine Woche zu warten oder selbst eine zu kreieren.
Kurz überlegt und im CAD-Programm gewütet und heraus kam eine einfache kupferbeschichtete GFK-Platte mit passenden Löchern für 3,5mm Goldies.
Nun habe ich die Möglichkeit jeden Regler einzeln, ohne großes Kabelgewirr anzustecken.


Als nächstes habe ich auf die Regler die passende SimonK-Software drauf geladen und neue Kabel mit richtiger Länge angelötet.
Die 3 Kabel pro Regler, die zum Motor führen, folgen noch.

Die Stromverteilerplatine passt super in das Zentrum des Hexas und man kann die Regler schön von Oben anstecken.
Zwei Gold-Kontakt-Stecker, jeweils einer pro Seite geht nach unten um vom Eagle Tree, was in die unterste Ebene eingebaut werden soll, den Strom zu erhalten.


Anschließend habe ich die Regler zum Platz-Test provisorisch mit Kabelbinder befestigt um zu sehen ob sie sich sauber anstöpseln lassen.


Weiter geht es dann mit der Verkabelung zwischen Motor und Regler

12 Meter Kabel, 245 Gramm schwer, das verbindet die Regler über die Ausleger mit den Motoren......
........ und dabei handelt es sich nur um 1,5qmm Kupfer-Litzen.

Kabelsalat ;D

Hier habe ich langsam begonnen die unterste Ebene mit der vorgesehenen Elektronik zu bestücken.
Verbaut werden soll später ein komplettes Eagle-Tree-System. Um spätere Umbauarbeiten so gering wie möglich zu halten binde ich den eLogger von Eagle Tree gleich mit ein. Zusätzliche Kabel für spätere Anschlussmöglichkeiten habe ich auch gleich mit in den Kabelbaum integriert.

Vorwort:
Im Frühjahr 2012 hatte ich mir bereits das Ziel gesetzt einen großen Copter zu bauen der lange Flugzeiten bietet, ruhig fliegt und in erster Linie eine GoPro heben kann, später dann auch eine etwas größere Cam.
Das Ziel mit der Flugzeit wurde auch erreicht, aber der Copter war sehr unruhig. Darauf hin habe ich von Ferdl hier aus dem Forum den Tip bekommen andere Motoren zu verbauen......
[HR][/HR]
Aus vielem Überlegen und Planen ist nun folgendes Entstanden:
Das Tagebuch eines Hexacopters
-Ruhige Kamera-Plattform
-lange Flugzeit
-FPV-Fähig
Direktlinks:
Baubericht Teil 1: (in diesem Beitrag) --- Planungsphase / Setup / Rohbau / Grundverkabelung
Baubericht Teil 2: Klick --- Liposchienen / GPS / Erstflug / Montage der 22N24P HP4114 Motoren
Baubericht Teil 3: Klick --- FPV-Equipment / Gimbal
Baubericht Teil 4: (in Arbeit)
Video zum Erstflug: >>>Klick<<<
Video mit Gimbal: >>>Klick<<<
[HR][/HR]
Entstandene Luftfotos:
>>zum Album<<
Das Setup:
Motoren:
5010-14 360KV >>>Klick<<<
22N24P HP4114-350KV >>>Klick<<< .......... Kurz-Vorstellung der HP4114-Motoren: >>>Klick<<<
Regler:
Mystery 40Amp geflasht mit SimonK
Lipo:
2x 5000er 6S
2x 5800er 6S
Props zum testen:
6 Stück 15,7 von Smartdrones
6 Stück 1575 von Foxtech
6 Stück 1555 von Foxtech
6 Stück 1755 von Foxtech
Schwebestrom:
20 bis 22 Amp (mit beiden Motorentypen in etwa gleich)
Steuerung:
-DJI Naza M mit GPS
[HR][/HR]
Die Ausmaße des Copters:
Abstand von Motorwelle zu Motorwelle: 1 Meter
Gesamtdruchmesser von Auslegerende zu Auselgerende: 113 cm
Duchmesser der Centerplates: 20 cm
Gewicht des Rahmens mit Motoren, Regler und Verkabelung beträgt 2450 Gramm
Abfluggewicht mit den 5010-14 360KV Gesamt: 4200 Gramm (Ohne FPV und sonstigem Equipment)
Abfluggewicht mit den 22N24P HP4114-350KV Gesamt: 4580 Gramm (Ohne FPV und sonstigem Equipment)
[HR][/HR]
Rechlticher Hintergrund:
Hier ein paar Infos zu meinem Hexacopter-Projekt aus rein rechtlicher Sicht:
Ich habe mehrere Telefonate mit unserer Landes-Luftfahrtbehörde Oberbayern geführt und herausgefunden das es zumindest hier in Bayern relativ problemlos ist eine Aufstiegsgenehmigung über 5 Kg zu bekommen.
Ich musste eine formlose Mail an den zuständigen Herren schreiben das ich diese benötige. Nun bekomme ich für den privaten Gebrauch eine Aufstiegsgenehmigung für 2 Jahre für komplett Bayern (wo ich mich zu 99,999 % zum fliegen aufhalte) mit der Genehmigung "Luftaufnahmen" für den privaten Gebrauch zu machen.
Die Probleme gehen erst los, wenn man das gewerblich machen will. Dann benötigt man zusätzlich zu der zweijährigen Aufstiegsgenehmigung für jeden Foto-Standort eine Einzelaufstiegsgehnehmigung.
Das Interessante ist: Wenn man einen Copter unter 5 kg betreibt, bekommt man eine Aufstiegs- und Fotogenehmigung für 2 Jahre ausgestellt für gewerbliche Zwecke....
Wenn man das ganze nicht gewerblich betreiben will und unter 5 Kg bleibt, ist das alles sowieso ohne Relevants....
Alles leicht verplant ;D
Da ich mich aber immer bemühe alles so legal wie möglich zu halten, habe ich diese Aufstiegsgenehmigung beantragt.
Ein zweiter Punkt ist der Versicherungsschutz. Hier muss jeder für sich abklären ob Modelle und in diesem Fall speziell Multicopter über 5 Kg mitversichert sind.
Eine extra Versicherung musste in meinem Fall nicht abgeschlossen werden, da beim DMO Modelle bis 150 Kg (Multicopter eingeschlossen) versichert sind. Sobald ich die gesetzlichen Auflagen einhalte (was mit meiner Aufstiegsgenehmigung der Fall ist) bin ich versichert und muss nichts zusätzlich abschließen.
Ich hoffe das hilft dem ein oder anderen der vor dem selben Problem steht wie ich es hatte und keinen Plan hat was dies angeht ;D
#########################################################
Beginn der Planung im Früh-Sommer 2012
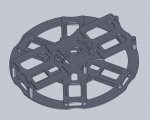
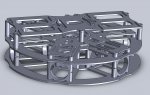
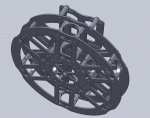
Zuerst wurde gezeichnet das dass CAD glühte und heraus kam das hier:
Da ich mich im Sommer und Herbst mehr auf die FPV-Fliegerrei mit Flächenmodellen konzentriert hatte, kam ich nur sporadisch zum zeichnen und planen des neuen Hexas.
Die letzten paar Wochen habe aber alle Teile zusammen bestellt die erstmal benötigt werden und die Materialschlacht kann beginnen.
#########################################################
Beginn der Arbeiten am 23.12.2012
-Die ersten Teile fielen aus der Fräse
-Die 25mm CFK-Rohre wurden auf Länge gebraucht. Ein Rohr ist 49,5 cm lang.
-Die beiden Centerplates haben einen Materialstärke von 2mm.
Heute ist leider auch meine Fräse ausgefallen und ich kann, bis der Fehler festgestellt und repariert ist nicht mehr weiterfräsen
Als nächstes wollte ich die Mystery 40 Regler mit SimonK flashen. Sowas vertreibt die Zeit ganz gut bis die Fräse wieder läuft.
#########################################################
Tagebucheintrag vom 28.12.2012:
(es geht endlich weiter)
Heute ging es wieder etwas weiter so dass endlich mal der Rohbau fertig wird.
Hierzu habe ich der Fräse die restlichen Teile entlockt. Das CFK flog nur so durch die Gegend und raus fiel dies hier:
Das Zusammenbauen dauert dann doch etwas länger als das Fräsen, aber es hat sich gelohnt und die Teile passen alle wie angegossen
Die Motoren in Reih und Glied vor ihrer Befestigung...
Der Rohbau mit angeschraubten Motoren ist dann schon mal fertig und die Ausmaße des Hexas werden sichtbar. Es handelt sich schließlich um reine 15 Zoll (40cm) Propeller ;D
#########################################################
Tagebucheintrag vom 05.01.2013:
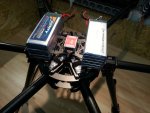
Heute begann die Oberbayerische Löt-Weltmeisterschaft im Hexacopter-Electronik-Löten
Ich dachte eigentlich, ich habe noch eine Stromverteiler-Platine von Flyduino rumliegen. Dem war aber nicht so. Nun hatte ich die Möglichkeit fast eine Woche zu warten oder selbst eine zu kreieren.
Kurz überlegt und im CAD-Programm gewütet und heraus kam eine einfache kupferbeschichtete GFK-Platte mit passenden Löchern für 3,5mm Goldies.
Nun habe ich die Möglichkeit jeden Regler einzeln, ohne großes Kabelgewirr anzustecken.
Als nächstes habe ich auf die Regler die passende SimonK-Software drauf geladen und neue Kabel mit richtiger Länge angelötet.
Die 3 Kabel pro Regler, die zum Motor führen, folgen noch.
Die Stromverteilerplatine passt super in das Zentrum des Hexas und man kann die Regler schön von Oben anstecken.
Zwei Gold-Kontakt-Stecker, jeweils einer pro Seite geht nach unten um vom Eagle Tree, was in die unterste Ebene eingebaut werden soll, den Strom zu erhalten.
Anschließend habe ich die Regler zum Platz-Test provisorisch mit Kabelbinder befestigt um zu sehen ob sie sich sauber anstöpseln lassen.
Weiter geht es dann mit der Verkabelung zwischen Motor und Regler
12 Meter Kabel, 245 Gramm schwer, das verbindet die Regler über die Ausleger mit den Motoren......
........ und dabei handelt es sich nur um 1,5qmm Kupfer-Litzen.
Kabelsalat ;D
Hier habe ich langsam begonnen die unterste Ebene mit der vorgesehenen Elektronik zu bestücken.
Verbaut werden soll später ein komplettes Eagle-Tree-System. Um spätere Umbauarbeiten so gering wie möglich zu halten binde ich den eLogger von Eagle Tree gleich mit ein. Zusätzliche Kabel für spätere Anschlussmöglichkeiten habe ich auch gleich mit in den Kabelbaum integriert.
Zuletzt bearbeitet: