
Legales UHF-Fernsteuersystem auf OpenLRS-Basis
.
README:
Diese Anleitung ist stark veraltet! Alle Angaben ohne Gewähr. Bitte weder USBASP noch Arduino-Software nutzen sondern alles via 3,3V-FTDI und Chrome-Tool machen, dann sollte nichts schief gehen.
_________________________________________________________________
Changelog:
_____________
Zuerst das Kleingedruckte:
Kurz zusammengefasst:
----------------------------------------------
+ Legal
+ Bessere Durchschlagskraft (und Reichweite) als 2G4-RC
+ Freies 2,4Ghz-Band für Video
+ Sehr niedriger Stromverbrauch des Senders (TX kann direkt an den Sendemodulschacht-Port angeschlossen werden)
+ Sender und Empfänger können beide direkt mit 3S-Lipos befeuert werden ^^
+ Unschlagbar günstig.
+ Kompatibilität - Was FrSky kann, kann auch OpenLRS. Keine Störung der Fernsteuerung durch TX-Leistung.
- Höhere Störanfälligkeit als 2G4-RC.
- Größere Antennen.
- Evtl. Probleme mit anderen RC-Komponenten & HD-Kameras.
- Sender und Empfänger müssen selbst programmiert werden, und dürfen weder verschenkt noch weiterverkauft werden.
----------------------------------------------
So ein bisschen ein Hybrid aus 35Mhz und 2,4 Ghz, alle Vor- und Nachteile miteinander vermischt.
Lasst euch vom Umfang dieses Beitrags nicht abschrecken, das täuscht ein wenig, aber seid euch dennoch bewusst, dass dies kein Plug-And-Play-Ersatz für euer aktuelles Fernsteuersystem ist!
________________________________________________________________________________________
Fangen wir an, so wird's gemacht:
A. Installieren der OpenLRSng-Firmware
Wir brauchen:
- aktuelles OpenLRS Sendemodul*
- aktuelles OpenLRS Empfangsmodul*
- einen 3,3 Volt FTDI-Adapter
- einen Computer mit Windows, Linux oder Macintosh.
*Ihr könnt Sender und Empfänger von OrangeRX als auch Flytron einsetzen und auch untereinander mischen. Flytron bietet ein Modul für Futaba-Sender, Orange für JR und Futaba. Wenn ihr noch V1-Hardware habt, könnt ihr die auch (eingeschränkt) weiter nutzen, seht euch aber vorher den Code an.
Beachtet bitte, dass die 1 Watt Versionen NICHT elektronisch auf 10mw drosselbar sind!
Aktuell gibt es Sender und Empfänger bei Flytron, Hobbyking und ElectronicaRC.
Wer kleine Empfänger braucht, kann sich von DTFUHF (Kanada)/China welche zukommen lassen.
1. Vorbereitendes
Auf dem Computer benötigt ihr die aktuelle Arduino-Software. Diese erhaltet ihr auf http://arduino.cc/en/Main/Software, oder falls ihr (wie ich) Ubuntu nutzt, im Ubuntu Software Center. Ob es Arduino im Mac App Store gibt müsst ihr prüfen, ich habe keinen Mac.
Wenn ihr Windows nutzt, müsst ihr nun womöglich den FTDI-Treiber installieren. Bei dem Laptop meiner Mutter hat es ohne Probleme über die Windows Update Treibersuche geklappt, bei dem von meiner Schwester kam ein Error. Auf der Website von FTDI findet ihr gegebenenfalls den Treiber: http://www.ftdichip.com/FTDrivers.htm
Unter einem aktuellen Linux (lt. hitec) oder Macintosh (lt. RChacker) funktioniert es ohne zusätzliche Treiber.
2. Arduino-Konfiguration
Nun öffnet die Arduino-Software. Um die Verbindung zum später an den FTDI-Adapter angeschlossenen Sender oder Empfänger herzustellen, müsst ihr den COM-Port wissen. Öffnet hierzu das Menü unter "Tools" -> "Serieller Port". Bei Linux ist es normal, dass nur der eine Adapter, den ihr angeschlossen habt, angezeigt wird. Zumindest bei meinen zwei Rechnern.
Unter Windows stehen da vielleicht schon ein paar mehr drinnen, die meisten sind "Fake" und für den User nicht nutzbar. Ihr müsst nun den echten herausfinden. Steckt dazu den FTDI-Adapter ab, startet Arduino, öffnet das oben genannte Menü und notiert euch, welche Portnummern aufgelistet sind (COM1, COM2, …). Nun schließt Arduino, steckt den Adapter an, startet Arduino neu und seht nach, welcher Port neu hinzugekommen ist - dieser ist euer "echter" Adapter. Diesen auswählen.

Für Sender und Empfänger braucht ihr dieselbe Firmware-Version. Die jeweils aktuelle stabile Version der OpenLRSNG-Firmware könnt ihr hier:
https://github.com/kh4/openLRSng/archive/master.zip herunterladen. (Projektseite: https://github.com/kh4/openLRSng )
Ihr erhaltet ein .zip-File. Dieses entpackt ihr, und nennt den Ordner "openLRSng". Dies ist wichtig, da Arduino jedes Projekt in einem Ordner haben möchte, der genauso heißt wie das Projekt selbst. Wenn ihr diesen Ordner öffnet, sollten direkt die openlrsng.ino und ein paar andere Daten sichtbar sein.
Wer panische Angst davor hat, dass ihm auf den zwei Zeilen Arduino-Code ein Fehler unterläuft, der kann sich auch jeweils das richtige Paket für sein Gerät von meiner Skydrive-Seite herunterladen:
- gelöscht, da veraltet -
Wer diese Pakete nutzt, kann hier die Einstellungen im Code überspringen und direkt nach dem öffnen den Prozessor wählen -> Seriellen Port wählen -> Upload. Außerdem sind bei diesen Paketen bereits Leistung, Base-Frequenz und HopList so eingestellt, dass das System theoretisch schon mit Default-Settings, ohne Terminal oder Configurator, in Betrieb genommen werden könnte. Tut dies bitte nicht! Jeder, der dasselbe Paket herunterlädt, installiert und mit Default fliegt kann euch dann im blödesten Falle vom Himmel holen, weil er auf 100% denselben Frequenzen funkt! Ändert unbedingt die Hopping-Kanäle!
3. Code-Einstellungen
Nun öffnet in Arduino via "Datei" -> "Öffnen" die OpenLRSng.ino-Datei aus dem Projektordner. Diese .ino-Datei ist sowas wie ein Index, Arduino verknüpft sich den restlichen Inhalt des Ordners automatisch zusammen.
Nun sollte es ungefähr so aussehen:

Bleibt nun im bereits geöffneten Reiter namens "OpenLRSng", und scrollt ein wenig herunter, bis zu diesem Punkt. Das Bild erklärt alles:

Vorsicht, es ist ab Firmware V3.1 nicht mehr der OrangeRX bzw. FlytronV2-Empfänger als Standardempfänger programmiert! Scrollt ein wenig herunter, bis ihr die zweite bzw. dritte schwarze Zeile im Code findet. Sie liest sich "#define RX_BOARD_TYPE 5"
-> Ihr müsst hier die 5 in eine 3 ändern!
Wenn ihr einen Empfänger als Sender programmieren wollt, müsst ihr zusätzlich (zum gerade genannten) bei "#define TX_BOARD_TYPE 2" die 2 in eine 3 umtauschen. Damit sagt ihr dem Programm, dass es sich um einen Empfänger-TX handelt. An der Hardware müsst ihr dazu nichts ändern.
Wählt oben im Menü noch einen letzten wichtigen Punkt aus, den verwendeten Prozessor:

(Ja, es ist richtig, dass wir ihm sagen dass er auf 5 Volt läuft, er aber in Wirklichkeit nur 3,3 Volt vom Board bekommt. Das muss er aber nicht wissen.") )
)
4. Aktion!
Wenn ihr das habt, schließt euren Sender oder Empfänger an den FTDI-Adapter an. Beachtet hierbei die PIN-Belegung! Die FTDI-Adapter, die ich bisher auf Ebay gesehen habe, hatten alle dieselbe PIN-Belegung wie die Programmierports auf Sender oder Empfänger. Und vorsicht, der Prozessor verträgt zwar theoretisch 5 Volt, aber das Funkmodul nicht - und das hängt an derselben Spannungsversorgung. Kein FTDI-Board mit 5 Volt Output verwenden, sondern eins mit 3,3 Volt!
Und, eine Bitte: NIEMALS eine Platine, welche einen Sendebaustein enthält, unter Strom setzen, ohne dass eine Antenne angeschlossen ist. Es tut nicht weh, vorsichtshalber eine Antenne anzuschließen, aber wenn ihr es nicht tut zerstört ihr euch womöglich euren Sender! Der Empfänger hat übrigens denselben HF-Baustein wie der Sender, sprich, auch ihn niemals ohne Antenne betrieben, egal ob beim Reichweitentest oder beim Programmieren!
Oben auf den
 neben dem "Häkchen" klicken, und warten, bis Arduino unten vermeldet "Upload abgeschlossen". Glückwunsch, ihr habt euren Sender oder Empfänger jetzt mit einer neuen Firmware beschrieben!
neben dem "Häkchen" klicken, und warten, bis Arduino unten vermeldet "Upload abgeschlossen". Glückwunsch, ihr habt euren Sender oder Empfänger jetzt mit einer neuen Firmware beschrieben!
Sobald TX und RX mit der neuen Software versorgt wurden, haben wir die Hälfte geschafft, als nächstes folgt das Einstellen von Frequenz, Sendeleistung, welche Kanäle ihr gerne hättet, ob ihr einen Rangebeep (Telemetrie) wollt, und der Kompromiss Geschwindigkeit vs. Reichweite.
__________________________________________________________________________________________
B. Setup über Google Chrome + BrowserApp
Jetzt kommt ein einfacher Part. Bis vor kurzem musste man jetzt ein Terminal-Programm installieren, mehrere Tasten (am besten mit 3 Händen (Hufen?)) gleichzeitig drücken und anschließend via Tastatur ein Menü bedienen. Okay, ich dramatisiere das ein bisschen, aber es war dennoch für viele nicht ganz easy. Aber seit Firmware V3.12 gibt es ein Programm speziell für das OpenLRS, sodass wir nicht mehr dazu gezwungen sind, ein Universal-Terminal zu nutzen.
Der Nachteil an der Sache ist, dass man hierfür Google Chrome benötigt, und dort ein Programm installieren muss - wozu man in Chrome mit einem Google-Konto angemeldet sein muss. Um diese App zu nutzen, braucht man also ein Google-Konto (aka. GoogleMail). Wenn ihr kein Google-Konto anlegen wollt bzw. es aus Datenschutzgründen nicht mit Chrome verbinden wollt, könnt ihr nach wie vor auf die Teraterm-Variante zurückgreifen, ich werde sie etwas weiter unten in diesem HowTo "archivieren".
1. Installation
Dieses Programm, auch App genannt, läuft also auf Basis des Browsers Chrome / Chromium / Chrome Canary von Google. Das bedeutet, dass ihr euch einen der Browser installieren müsst, falls ihr es noch nicht getan habt.
--> Installiert/startet Chrome, und installiert euch danach folgendes Programm: http://goo.gl/iX7dJx
2. Setup:
Nach der Installation sollte euch Chrome, wenn ihr einen neuen Tab öffnet, eine neue App namens "OpenLRSng - Configurator" anbieten. Schließt den Sender über den FTDI-Adapter an den USB-Port an, und startet die App.
Der Willkommen-Screen ist eher mager, daher schnell weiter. Klickt oben links auf das PullDown-Menü, und wählt den seriellen Port aus, über den ihr schon in Arduino den Sender geflasht habt, und klickt auf "Connect". Die App baut nun eine Verbindung auf, und führt euch...

...direkt zum Konfigurations-Menü des Senders:

Eine Kleine Auflistung dessen, welche Einstellung was bewirkt:
Wenn ihr eure Einstellungen gemacht habt, dann vergesst nicht, rechts auf den "Safe to EEPROM"-Button zu klicken! Ohne diesen wird keine der von euch gemachten Einstellungen übernommen!
Wenn ihr etwas an eurem Empfänger konfigurieren wollt, dann müsst ihr ihn jetzt griffbereit haben. Sobald ihr auf den Reiter mit "RX" klickt, werdet ihr aufgefordert, den Empfänger einzuschalten. Tut dies, und der Sender baut via Funk eine Verbindung zum Empfänger auf. Das Konfigurations-Menü des Empfängers sieht folgendermaßen aus:

Wieder habt ihr jede Menge Knöpfe zum drann rumspielen. Was sie genau machen:
Nun der dritte Reiter - "Spectrum Analyser". Mit diesem Tool könnt ihr vom Sendermodul das Spektrum aller technisch empfangbaren Frequenzen anzeigen lassen, und somit Störquellen im Modell, andere UHF-Sender oder kosmische Strahlung ausfindig machen. Wenn ihr unten bei "Start Frequency" 433,05 und bei "Stop Frequency" 434,79 eintragt, könnt ihr den Frequenzbereich eurer Fernsteuerung sehen. (Zur Verfeinerung der Anzeige am besten noch bei "Average Sampels" 1000 und "Chanel Spacing" 25 eintragen.)
Damit habe ich z.B. heute schon festgestellt, dass meine GoPro Hero2 entgegen diverser Youtube-Berichte 100% sauber ist, die HoryzonHD V3, wenn ich sie komplett mit Alufolie einwickle, auch UHF-Freundlich ist UND dass mein Autoschlüssel auf exakt 434 Mhz sendet, aber ziemlich weit streut.

Nachdem wir uns durch das ganze System durchgearbeitet haben, noch einmal oben auf "Disconnect" klicken und den Sender abstecken - Großartig, das System ist nun auf legalen Frequenzen und Leistungen unterwegs! Viel Spaß! =)
B II. - Alternative zur Chrome-App: Teraterm
Dieser Teil wird vorerst nicht weiter geupdated! Sollte sich etwas geändert haben und ihr braucht Hilfe, könnt ihr mich gerne anschreiben.
C. Tipps und Tricks - und sonstiges...
(Vieles noch ungetestet und nur von der Github-Projektseite auf Deutsch übertragen)
1. Empfänger als Sender nutzen.
2. Summensignal am Empfänger
3. Failsafe setzen
4. Binding!
5. Spektrum Analyser (Experimental)
6. Antennen:
7. Vorsicht vor Brownouts!
Ein kleines Demovideo (Video-Description lesen):
http://youtu.be/eJsmRvCShpg
________________________________________________________________________________________
D. Danksagung, ohne Reihenfolge:
E. Sonstiges
"Warum hast du das jetzt gemacht?"
Nun, ich sehe hier mein altes GF-Highend-2G4-Set herumstauben, und es stört mich, dass ich es nicht mehr einsetzen kann, weil ich die Fernsteuerfrequenz auf 2G4 gewechselt habe. (Und meine Fatshark hat nen 2G4-RX). Im Vergleich zu dem, was ich unter 2G4-Video geflogen bin, ist meine Zeit unter 5G8 verschwindend gering.
Zweitens finde ich es echt schade, dass das Konzept OpenLRS gestorben ist, und zwar aus keinem wirklichen Grund. Ich hab mir den ganzen originalen 36-Seiten-Thread zum OpenLRS von 2011 reingezogen und keinen Grund gefunden, warum das Projekt "eingestellt" wurde - Nein, die Bundesnetzagentur hat uns für die Sache damals schon grünes Licht gegeben.
Das Problem lag woanders: Irgendwann ist die Stimmung im Thread gekippt, die ersten haben mangelhafte Platinen erhalten, nicht funktionsfähige Empfänger, erste Easystar-Verluste, zuckende Servos, irgendwer hat sein eigenes System parallel im selben Thread entwickelt, Chaos, Schokoladenregen, unzuverlässige Firmware, Schlammschlacht, keiner hat sich mehr gemocht und seither ist Funkstille.
Seither hat sich aber auch die Qualität des OpenLRS, vor allem der Software um Welten verbessert. Die OpenLRSng-Firmware von Kha stellt hier einen Quantensprung dar.
Es wird heute kaum beachtet, vielleicht wegen des im Vergleich zu „den Großen" sehr niedrigen Komplettpreises (2x RX) von 40 USD (Kost nix taugt nix), weil die Programmierung zu aufwendig erscheint oder es gleich mit dem „UHF IST ILLEGAL!“-Vorurteil-Hammer abgeschmettert wird.
Und ehrlich: Welches „FPV-Team“ fliegt OpenLRS? Update: Die Dark Side Crew fliegt OpenLRS!
Gruß,
hitec

.
README:
Diese Anleitung ist stark veraltet! Alle Angaben ohne Gewähr. Bitte weder USBASP noch Arduino-Software nutzen sondern alles via 3,3V-FTDI und Chrome-Tool machen, dann sollte nichts schief gehen.
_________________________________________________________________
Changelog:
09.04.2014: Brownout-Demovideo hinzugefügt. Bitte nutzt unbedingt einen Stützkondensator um die BEC-Spannung zu stabilisieren, selbst 9 Gramm Digitalservos können den Empfänger im Flug außer Gefecht setzen! Mehr dazu ganz unten im HowTo, kurz vor dem Schlusswort.
HINWEIS an alle, die noch vor dem Ändern der Stock-Software auf OpenLRSng stehen: Es ist inzwischen möglich, ohne Arduino, direkt über die Chrome-Configurator-App, die Software aufzuspielen. Damit wird, abgesehen von der App, keine weitere Software mehr benötigt.
In der App findet sich auf der Startseite unten links ein kleiner Knopf "Firmware Flasher". Im folgenden Menü auswählen, welche Hardware man flashen will & ab die Post.
Eine Anpassung des gesamten HowTo's kommt noch. Vielleicht. :/
Kleines Update auf V3.2 : Neue Audio-Telemetrie via VideoTX - wird morgen ausprobiert. Zeitmangel!
# GROßES Update am 1. September: Einführung von Firmware V3.12, und damit der Chrome-Configurator-App, die das System erheblich einfacher macht. Das Terminal wird nun nicht mehr benötigt. Zusätzlich die Abschnitts-Markierungen lila gemacht, um den Bericht besser überblicken zu können, und den alten Teraterm-Teil in ein Quote-Fenster verschoben. Zusätzlich gibt's fertige Firmware-Packs für gängige Geräte, inklusive legaler Default-Werte.
# Update am 15. August: HowTo auf Firmware V3.1 geupdated. Änderungen hauptsächlich im Terminal.
HINWEIS an alle, die noch vor dem Ändern der Stock-Software auf OpenLRSng stehen: Es ist inzwischen möglich, ohne Arduino, direkt über die Chrome-Configurator-App, die Software aufzuspielen. Damit wird, abgesehen von der App, keine weitere Software mehr benötigt.
In der App findet sich auf der Startseite unten links ein kleiner Knopf "Firmware Flasher". Im folgenden Menü auswählen, welche Hardware man flashen will & ab die Post.
Eine Anpassung des gesamten HowTo's kommt noch. Vielleicht. :/
Kleines Update auf V3.2 : Neue Audio-Telemetrie via VideoTX - wird morgen ausprobiert. Zeitmangel!
# GROßES Update am 1. September: Einführung von Firmware V3.12, und damit der Chrome-Configurator-App, die das System erheblich einfacher macht. Das Terminal wird nun nicht mehr benötigt. Zusätzlich die Abschnitts-Markierungen lila gemacht, um den Bericht besser überblicken zu können, und den alten Teraterm-Teil in ein Quote-Fenster verschoben. Zusätzlich gibt's fertige Firmware-Packs für gängige Geräte, inklusive legaler Default-Werte.
# Update am 15. August: HowTo auf Firmware V3.1 geupdated. Änderungen hauptsächlich im Terminal.
Zuerst das Kleingedruckte:
- Bevor sich gleich der erste „UHF ist illegal!“-Finger hebt: Nein, das ist es nicht - nicht jedes. Ich habe mich hierfür extra mit der Bundesnetzagentur in Verbindung gesetzt. Da es sich bei diesem Projekt sowohl um einen Eigenbau als auch um ein weder verkäufliches noch zu verschenkendes Stück Sendetechnik im SRD-Bereich handelt, müssen hierfür keine exotischen Konformitätsverfahren durchlaufen werden. Kein freier Handel, kein für den freien Handel nötiger Papierkram. Es MUSS aber sichergestellt werden, dass das Gerät sich an die für den SRD-Bereich innerhalb von 433 Mhz geltenden Regeln hält. Das bedeutet: Kein ausbrechen aus dem erlaubten Frequenzrahmen (433,05 <-> 434,79) und auch keine Steigerung der Sendeleistung über die erlaubten 10mw (10 dbm) hinaus. (Damit fahren wir auf derselben Zuteilung wie z.B. Autoschlüssel, Funkthermometer oder Garagentoröffner.)
Dies kann über die Softwareparameter innerhalb der OpenLRSng-Firmware eingestellt werden. Auch habe ich nachgefragt, ob Frequenzhopping erlaubt ist. Laut BnetzA spricht da nichts dagegen.
Das hat Rangarid Anno 2011 schon festgestellt, und wurde mir via Email vor kurzem nochmals bestätigt.
- Noch etwas: Der Umstieg auf 433 Mhz lohnt sich nur wirklich für "Buschpiloten", also solche, die regelmäßig mit dem Multicopter oder Flugzeug "im Unterholz" unterwegs sind, wo Objekte wie Bäume oder Büsche das Sichtfeld blockieren. Das könnte eine 2,4 Ghz-Fernsteuerung zwar sicherlich auch wegstecken, allerdings kein 5,8 Ghz-Videolink. Durch das Entrümpeln des 2,4-Bandes vom Fernsteuerlink wird dieses für einen Videolink frei, welcher dank der niedrigeren Frequenz eine bessere Durchschlagskraft verspricht. ImmersionRC hat für demnächst eine neue Generation 2,4 Ghz-FPV-Empfänger angekündigt - ich hoffe, dass man da nochmal was an Performance rauskitzeln kann.
Auf dem offenen Feld hingegen würde ich das OpenLRS nicht einsetzen, denn das auf dem Markt erhältliche 5,8 Ghz-Equipment hat sich qualitativ sehr stark verbessert im Vergleich zu den Anfangszeiten, und auch eine 2,4-Fernsteuerung bietet heute bis zu 4 Kilometer Reichweite. Solange das Sichtfeld frei ist, wird man kaum einen Unterschied spüren. Außerdem sind auf 433 Mhz noch jede Menge anderer Störsender unterwegs - nicht nur Autoschlüssel, Funkwetterstationen oder Garagentoröffner, welche nur kurz einen Stör-Blitz abgeben, nein: Es gibt auch Amateurfunkverkehr, Kran-Fernsteuerungen mit weit mehr Leistung als SRD, Betriebsfunk über größere Distanzen und und und.
- Das OpenLRS bietet maximal 24 Kanäle für‘s Frequenzhopping, HoTT bietet 75 Kanäle.
- Das OpenLRS hat einen Frequenzbereich von 1,74 Mhz, 2G4-RC hat 83,5 Mhz zur Verfügung.
Die Verbindung einer 2,4Ghz-Fernsteuerung ist nahezu unstörbar, auf 433Mhz ist einfach nicht der Platz da zum ausweichen. Es ist nicht gefährlich auf dieser Frequenz zu fliegen, wir haben immerhin auch 24 Hopping-Kanäle zur Verfügung, aber man sollte trotzdem "in der nähe der Zivilisation" vorsichtig sein.
Außerdem sei noch angemerkt, dass viele HD-Kameras leicht in das Signal stören, bis hin zur HoryzonHD, welche selbst in der Version 3 ohne Alufolie-Umwicklung absolut nicht für UHF geeignet ist. Siehe den Test von Bruce (RCmodelreviews). Die einzige 100% UHF-kompatible "dicke" HD-Kamera, die ich kenne, ist die Boscam Explorer.
- Ihr kennt das: Ich schreibe hier nur, und was ihr macht, liegt in eurer Verantwortung. Ich übernehme keine Haftung für Schäden/Folgeschäden/whatever, die durch Nachahmen von etwas hier niedergeschriebenen entstehen. Wenn sich hier Fehler eingeschlichen haben, informiert mich bitte, dass ich es korrigieren kann.
Dies kann über die Softwareparameter innerhalb der OpenLRSng-Firmware eingestellt werden. Auch habe ich nachgefragt, ob Frequenzhopping erlaubt ist. Laut BnetzA spricht da nichts dagegen.
Das hat Rangarid Anno 2011 schon festgestellt, und wurde mir via Email vor kurzem nochmals bestätigt.
- Noch etwas: Der Umstieg auf 433 Mhz lohnt sich nur wirklich für "Buschpiloten", also solche, die regelmäßig mit dem Multicopter oder Flugzeug "im Unterholz" unterwegs sind, wo Objekte wie Bäume oder Büsche das Sichtfeld blockieren. Das könnte eine 2,4 Ghz-Fernsteuerung zwar sicherlich auch wegstecken, allerdings kein 5,8 Ghz-Videolink. Durch das Entrümpeln des 2,4-Bandes vom Fernsteuerlink wird dieses für einen Videolink frei, welcher dank der niedrigeren Frequenz eine bessere Durchschlagskraft verspricht. ImmersionRC hat für demnächst eine neue Generation 2,4 Ghz-FPV-Empfänger angekündigt - ich hoffe, dass man da nochmal was an Performance rauskitzeln kann.
Auf dem offenen Feld hingegen würde ich das OpenLRS nicht einsetzen, denn das auf dem Markt erhältliche 5,8 Ghz-Equipment hat sich qualitativ sehr stark verbessert im Vergleich zu den Anfangszeiten, und auch eine 2,4-Fernsteuerung bietet heute bis zu 4 Kilometer Reichweite. Solange das Sichtfeld frei ist, wird man kaum einen Unterschied spüren. Außerdem sind auf 433 Mhz noch jede Menge anderer Störsender unterwegs - nicht nur Autoschlüssel, Funkwetterstationen oder Garagentoröffner, welche nur kurz einen Stör-Blitz abgeben, nein: Es gibt auch Amateurfunkverkehr, Kran-Fernsteuerungen mit weit mehr Leistung als SRD, Betriebsfunk über größere Distanzen und und und.
- Das OpenLRS bietet maximal 24 Kanäle für‘s Frequenzhopping, HoTT bietet 75 Kanäle.
- Das OpenLRS hat einen Frequenzbereich von 1,74 Mhz, 2G4-RC hat 83,5 Mhz zur Verfügung.
Die Verbindung einer 2,4Ghz-Fernsteuerung ist nahezu unstörbar, auf 433Mhz ist einfach nicht der Platz da zum ausweichen. Es ist nicht gefährlich auf dieser Frequenz zu fliegen, wir haben immerhin auch 24 Hopping-Kanäle zur Verfügung, aber man sollte trotzdem "in der nähe der Zivilisation" vorsichtig sein.
Außerdem sei noch angemerkt, dass viele HD-Kameras leicht in das Signal stören, bis hin zur HoryzonHD, welche selbst in der Version 3 ohne Alufolie-Umwicklung absolut nicht für UHF geeignet ist. Siehe den Test von Bruce (RCmodelreviews). Die einzige 100% UHF-kompatible "dicke" HD-Kamera, die ich kenne, ist die Boscam Explorer.
- Ihr kennt das: Ich schreibe hier nur, und was ihr macht, liegt in eurer Verantwortung. Ich übernehme keine Haftung für Schäden/Folgeschäden/whatever, die durch Nachahmen von etwas hier niedergeschriebenen entstehen. Wenn sich hier Fehler eingeschlichen haben, informiert mich bitte, dass ich es korrigieren kann.
----------------------------------------------
+ Legal
+ Bessere Durchschlagskraft (und Reichweite) als 2G4-RC
+ Freies 2,4Ghz-Band für Video
+ Sehr niedriger Stromverbrauch des Senders (TX kann direkt an den Sendemodulschacht-Port angeschlossen werden)
+ Sender und Empfänger können beide direkt mit 3S-Lipos befeuert werden ^^
+ Unschlagbar günstig.
+ Kompatibilität - Was FrSky kann, kann auch OpenLRS. Keine Störung der Fernsteuerung durch TX-Leistung.
- Höhere Störanfälligkeit als 2G4-RC.
- Größere Antennen.
- Evtl. Probleme mit anderen RC-Komponenten & HD-Kameras.
- Sender und Empfänger müssen selbst programmiert werden, und dürfen weder verschenkt noch weiterverkauft werden.
----------------------------------------------
So ein bisschen ein Hybrid aus 35Mhz und 2,4 Ghz, alle Vor- und Nachteile miteinander vermischt.
Lasst euch vom Umfang dieses Beitrags nicht abschrecken, das täuscht ein wenig, aber seid euch dennoch bewusst, dass dies kein Plug-And-Play-Ersatz für euer aktuelles Fernsteuersystem ist!
________________________________________________________________________________________
Fangen wir an, so wird's gemacht:
A. Installieren der OpenLRSng-Firmware
Wir brauchen:
- aktuelles OpenLRS Sendemodul*
- aktuelles OpenLRS Empfangsmodul*
- einen 3,3 Volt FTDI-Adapter
- einen Computer mit Windows, Linux oder Macintosh.
*Ihr könnt Sender und Empfänger von OrangeRX als auch Flytron einsetzen und auch untereinander mischen. Flytron bietet ein Modul für Futaba-Sender, Orange für JR und Futaba. Wenn ihr noch V1-Hardware habt, könnt ihr die auch (eingeschränkt) weiter nutzen, seht euch aber vorher den Code an.
Beachtet bitte, dass die 1 Watt Versionen NICHT elektronisch auf 10mw drosselbar sind!
Aktuell gibt es Sender und Empfänger bei Flytron, Hobbyking und ElectronicaRC.
Wer kleine Empfänger braucht, kann sich von DTFUHF (Kanada)/China welche zukommen lassen.
1. Vorbereitendes
Auf dem Computer benötigt ihr die aktuelle Arduino-Software. Diese erhaltet ihr auf http://arduino.cc/en/Main/Software, oder falls ihr (wie ich) Ubuntu nutzt, im Ubuntu Software Center. Ob es Arduino im Mac App Store gibt müsst ihr prüfen, ich habe keinen Mac.
Wenn ihr Windows nutzt, müsst ihr nun womöglich den FTDI-Treiber installieren. Bei dem Laptop meiner Mutter hat es ohne Probleme über die Windows Update Treibersuche geklappt, bei dem von meiner Schwester kam ein Error. Auf der Website von FTDI findet ihr gegebenenfalls den Treiber: http://www.ftdichip.com/FTDrivers.htm
Unter einem aktuellen Linux (lt. hitec) oder Macintosh (lt. RChacker) funktioniert es ohne zusätzliche Treiber.
2. Arduino-Konfiguration
Nun öffnet die Arduino-Software. Um die Verbindung zum später an den FTDI-Adapter angeschlossenen Sender oder Empfänger herzustellen, müsst ihr den COM-Port wissen. Öffnet hierzu das Menü unter "Tools" -> "Serieller Port". Bei Linux ist es normal, dass nur der eine Adapter, den ihr angeschlossen habt, angezeigt wird. Zumindest bei meinen zwei Rechnern.
Unter Windows stehen da vielleicht schon ein paar mehr drinnen, die meisten sind "Fake" und für den User nicht nutzbar. Ihr müsst nun den echten herausfinden. Steckt dazu den FTDI-Adapter ab, startet Arduino, öffnet das oben genannte Menü und notiert euch, welche Portnummern aufgelistet sind (COM1, COM2, …). Nun schließt Arduino, steckt den Adapter an, startet Arduino neu und seht nach, welcher Port neu hinzugekommen ist - dieser ist euer "echter" Adapter. Diesen auswählen.
Für Sender und Empfänger braucht ihr dieselbe Firmware-Version. Die jeweils aktuelle stabile Version der OpenLRSNG-Firmware könnt ihr hier:
https://github.com/kh4/openLRSng/archive/master.zip herunterladen. (Projektseite: https://github.com/kh4/openLRSng )
Ihr erhaltet ein .zip-File. Dieses entpackt ihr, und nennt den Ordner "openLRSng". Dies ist wichtig, da Arduino jedes Projekt in einem Ordner haben möchte, der genauso heißt wie das Projekt selbst. Wenn ihr diesen Ordner öffnet, sollten direkt die openlrsng.ino und ein paar andere Daten sichtbar sein.
Wer panische Angst davor hat, dass ihm auf den zwei Zeilen Arduino-Code ein Fehler unterläuft, der kann sich auch jeweils das richtige Paket für sein Gerät von meiner Skydrive-Seite herunterladen:
- gelöscht, da veraltet -
Wer diese Pakete nutzt, kann hier die Einstellungen im Code überspringen und direkt nach dem öffnen den Prozessor wählen -> Seriellen Port wählen -> Upload. Außerdem sind bei diesen Paketen bereits Leistung, Base-Frequenz und HopList so eingestellt, dass das System theoretisch schon mit Default-Settings, ohne Terminal oder Configurator, in Betrieb genommen werden könnte. Tut dies bitte nicht! Jeder, der dasselbe Paket herunterlädt, installiert und mit Default fliegt kann euch dann im blödesten Falle vom Himmel holen, weil er auf 100% denselben Frequenzen funkt! Ändert unbedingt die Hopping-Kanäle!
3. Code-Einstellungen
Nun öffnet in Arduino via "Datei" -> "Öffnen" die OpenLRSng.ino-Datei aus dem Projektordner. Diese .ino-Datei ist sowas wie ein Index, Arduino verknüpft sich den restlichen Inhalt des Ordners automatisch zusammen.
Nun sollte es ungefähr so aussehen:
Bleibt nun im bereits geöffneten Reiter namens "OpenLRSng", und scrollt ein wenig herunter, bis zu diesem Punkt. Das Bild erklärt alles:
Vorsicht, es ist ab Firmware V3.1 nicht mehr der OrangeRX bzw. FlytronV2-Empfänger als Standardempfänger programmiert! Scrollt ein wenig herunter, bis ihr die zweite bzw. dritte schwarze Zeile im Code findet. Sie liest sich "#define RX_BOARD_TYPE 5"
-> Ihr müsst hier die 5 in eine 3 ändern!
Wenn ihr einen Empfänger als Sender programmieren wollt, müsst ihr zusätzlich (zum gerade genannten) bei "#define TX_BOARD_TYPE 2" die 2 in eine 3 umtauschen. Damit sagt ihr dem Programm, dass es sich um einen Empfänger-TX handelt. An der Hardware müsst ihr dazu nichts ändern.
Wählt oben im Menü noch einen letzten wichtigen Punkt aus, den verwendeten Prozessor:
(Ja, es ist richtig, dass wir ihm sagen dass er auf 5 Volt läuft, er aber in Wirklichkeit nur 3,3 Volt vom Board bekommt. Das muss er aber nicht wissen.
)4. Aktion!
Wenn ihr das habt, schließt euren Sender oder Empfänger an den FTDI-Adapter an. Beachtet hierbei die PIN-Belegung! Die FTDI-Adapter, die ich bisher auf Ebay gesehen habe, hatten alle dieselbe PIN-Belegung wie die Programmierports auf Sender oder Empfänger. Und vorsicht, der Prozessor verträgt zwar theoretisch 5 Volt, aber das Funkmodul nicht - und das hängt an derselben Spannungsversorgung. Kein FTDI-Board mit 5 Volt Output verwenden, sondern eins mit 3,3 Volt!
Und, eine Bitte: NIEMALS eine Platine, welche einen Sendebaustein enthält, unter Strom setzen, ohne dass eine Antenne angeschlossen ist. Es tut nicht weh, vorsichtshalber eine Antenne anzuschließen, aber wenn ihr es nicht tut zerstört ihr euch womöglich euren Sender! Der Empfänger hat übrigens denselben HF-Baustein wie der Sender, sprich, auch ihn niemals ohne Antenne betrieben, egal ob beim Reichweitentest oder beim Programmieren!
Oben auf den
Sobald TX und RX mit der neuen Software versorgt wurden, haben wir die Hälfte geschafft, als nächstes folgt das Einstellen von Frequenz, Sendeleistung, welche Kanäle ihr gerne hättet, ob ihr einen Rangebeep (Telemetrie) wollt, und der Kompromiss Geschwindigkeit vs. Reichweite.
__________________________________________________________________________________________
B. Setup über Google Chrome + BrowserApp
Jetzt kommt ein einfacher Part. Bis vor kurzem musste man jetzt ein Terminal-Programm installieren, mehrere Tasten (am besten mit 3 Händen (Hufen?)) gleichzeitig drücken und anschließend via Tastatur ein Menü bedienen. Okay, ich dramatisiere das ein bisschen, aber es war dennoch für viele nicht ganz easy. Aber seit Firmware V3.12 gibt es ein Programm speziell für das OpenLRS, sodass wir nicht mehr dazu gezwungen sind, ein Universal-Terminal zu nutzen.
Der Nachteil an der Sache ist, dass man hierfür Google Chrome benötigt, und dort ein Programm installieren muss - wozu man in Chrome mit einem Google-Konto angemeldet sein muss. Um diese App zu nutzen, braucht man also ein Google-Konto (aka. GoogleMail). Wenn ihr kein Google-Konto anlegen wollt bzw. es aus Datenschutzgründen nicht mit Chrome verbinden wollt, könnt ihr nach wie vor auf die Teraterm-Variante zurückgreifen, ich werde sie etwas weiter unten in diesem HowTo "archivieren".
1. Installation
Dieses Programm, auch App genannt, läuft also auf Basis des Browsers Chrome / Chromium / Chrome Canary von Google. Das bedeutet, dass ihr euch einen der Browser installieren müsst, falls ihr es noch nicht getan habt.
--> Installiert/startet Chrome, und installiert euch danach folgendes Programm: http://goo.gl/iX7dJx
2. Setup:
Nach der Installation sollte euch Chrome, wenn ihr einen neuen Tab öffnet, eine neue App namens "OpenLRSng - Configurator" anbieten. Schließt den Sender über den FTDI-Adapter an den USB-Port an, und startet die App.
Der Willkommen-Screen ist eher mager, daher schnell weiter. Klickt oben links auf das PullDown-Menü, und wählt den seriellen Port aus, über den ihr schon in Arduino den Sender geflasht habt, und klickt auf "Connect". Die App baut nun eine Verbindung auf, und führt euch...
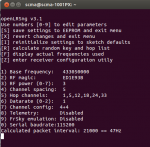
...direkt zum Konfigurations-Menü des Senders:
Eine Kleine Auflistung dessen, welche Einstellung was bewirkt:
Basic Settings:
Advanced Settings:
Hop Channels:
- RFM_Type: Das eingesetzte Modul. Man kann das OpenLRS auch auf anderen Frequenzen betreiben, indem man ein anderes HF-Modul einlötet. Kurz gesagt: Tut es nicht. Ihr habt die Wahl zwischen 868Mhz (nur 2 Hopping-Kanäle) und 915Mhz (Mobilfunknetz). 433Mhz ist eine gute Wahl für RC.
- Operating Frequency: Die Basisfrequenz des OpenLRS. Tragt hier 433050 ein. Ich hab euch da was schönes gemalt zur Erklärung, hier: Turm...
- RF Power: Die Sendeleistung, von 0 bis 7. Kurz eine Auflistung, was was ist:
7 = 100mw
6 = 50mw
5 = 25mw
4 = 13mw
3 = 6mw
2 = 3mw
1 = 1,6mw
0 = 1,3mw
Unsere Wahl ist die Nummer 3, also 6 Milliwatt. Das entspricht 8 dBm Ausgangsleistung, in Kombination mit einem Dipol (z.B. DIY oder Nagoya-771) kommen wir damit perfekt auf die erlaubten 10 dBm EIRP. - Channel Spacing: Sollte nicht geändert werden. Dieser Punkt beschreibt den Abstand, den das System zwischen den Kanälen lässt. 5 steht für 50000 Hz.
- Serial Baudrate Die Baudrate, mit der das OpenLRS via Terminal oder Chrome-App angesprochen werden kann. Nicht ändern.
- Baudrate: Kritischer Punkt. Ihr habt die Optionen 4800, 9600 und 19200:
4800 = hohe Reichweite, wenig Daten
9600 = mittlere Reichweite, mittlere Daten
19200 = kurze Reichweite, viele Daten.
Je weniger Daten übertragen werden, desto mehr Zeitverzögerung habt ihr zwischen der Steuereingabe an der Fernsteuerung und der Reaktion des Servos. Die Aktualisierungsrate in Hz könnt ihr auf der rechten Seite des Menüs unter "Info" ablesen. Wie viel ihr da aushaltet, ist eure Sache. Warum dann nicht einfach eine höhere Baudrate wählen?
Nun, ein OpenLRS auf 9600 und 10mw kommt ca. genauso weit wie ein OpenLRS mit 19200 und 100mw, denn je höher die Baudrate ist, desto unempfindlicher wird der Empfänger. Ich empfehle 9600 (ohne Telemetrie), was gleichzeitig eine hohe Reichweite und angenehm/sofort reagierende Servos bringt. - Telemetry: Mein Lieblingspunkt: Wenn man es aktiviert ("Yes"), warnt es einen wenn man an die Reichweitengrenze fliegt (Verlorene Pakete = Piepen), allerdings bedeutet es auch, dass die Servoaktualisierungsrate halbiert wird - wodurch ihr die Baudrate hochdrehen müsst, was euch wiederum massiv Reichweite kostet. Aktuell bin ich der Meinung, dass man das nicht braucht, weil das OLRS sowieso eine enorme Reichweite hat, die man nicht so einfach mal bricht. Allerdings wäre es praktisch bei Störungen, da das piepen bei verlorenen Paketen im Gegensatz zu RSSI auch mitteilt, wenn das Band zu stark "verseucht" ist.
Die einzige Telemetriefunktion, abgesehen vom FrSky-Mode, ist bisher der Rangebeep. Wer sich damit sicher fühlt und sowieso nicht so weit weg will, der kann es ja mal ausprobieren, ich für meinen Teil kann es aber nicht empfehlen.
Interessant ist der FrSky-Telemetrie-Modus ("Yes - FrSky") - er schaltet dem OpenLRS eine Emulation der FrSky-Telemetrie hinzu. Sprich, wenn ihr ein paar Sensoren an euren aktuellen FrSky-Empfänger angeschlossen habt und auf OpenLRS umsteigt, könnt ihr diese Telemetriesensoren weiter nutzen! Außerdem kann euch eine Fernsteuerung, die euch zuvor noch die RSSI-Werte des FrSky-Systems angezeigt hat, nun die OpenLRS-RSSI-Werte anzeigen.
Über die genaue Anbindung der Module an Sensoren und Fernsteuerung konnte ich noch nichts finden, meines Wissens läuft es über die TX- und RX-Ports, an welche auch der FTDI-Adapter zum programmieren oder fürs Terminal angeschlossen wird. Wie gesagt, ich besitze kein FrSky-System, und kann es daher nicht ausprobieren. - Channel Config: Hier wird die Kanalzahl eingestellt. Ihr könnt hier zwischen vollwertigen und On/Off-Kanälen wählen. Die 4+4-Version überträgt, wie das Setup schon sagt, 4 proportionale Kanäle um das Modell zu steuern, und bietet zusätzlich 4 Schaltkanäle. Nuri-Piloten nutzen meist eh nur 3 Kanäle (Motor + 2 Servos), weshalb die 4+4-Option hier locker ausreicht, so Sachen wie Kamera-Auslöser oder HH/ACC können nach wie vor auf den Schalter-Kanälen gesteuert werden. Faustregel auch hier: Je weniger übertragen werden muss, desto schneller kommen die Daten bei den Servos an, siehe die unter "Baudrate" erwähnte Hz-Zahl.
Advanced Settings:
- Number of Hop Chanels: Im Grunde selbsterklärend, die Anzahl der verwendeten Kanäle. Ihr könnt hier frontal 24 eintragen und das ganze 433Mhz-Band niederwalzen, was natürlich auch die Chance erhöht, andere 433-Anwender zu stören. Außerdem springt der Empfänger, wenn er mehrere Pakete hintereinander verliert, wieder auf Kanal 1 und wartet bis der Sender wieder "vorbeispringt" - und je mehr Kanäle er hat, desto länger muss der Empfänger warten. Kann an der Reichweitengrenze zu Problemen führen, da gute Pakete im Rauschen ausgelassen werden, weil der Empfänger wartet.
Als gutes Mittel haben sich 6 bis 8 Kanäle erwiesen, quer über das Band verteilt. Dadurch hält sich die Belastung des Bandes in Grenzen, und die Verbindung ist dennoch sicher. - Maximum desired frequency: Die Frequenzobergrenze, bis wie weit das System hoch darf. Tragt hier 434790 ein, und klickt bei Bedarf einmal auf den Button "Randomize", um das System nun zufällig passende Kanäle auswählen zu lassen, siehe dem nächsten Abschnitt:
Hop Channels:
Hier stellt ihr eure Kanäle ein, auf denen das System hoppt. Es ist wichtig, dass ihr zumindest unter "Advanced Settings" einmal auf "Randomize" klickt, oder noch besser euch selbst Kanäle quer über das Band aussucht, um zu verhindern, dass sich das eure System und das eines anderen Piloten überschneiden. Wenn ihr die Zeit habt, sucht euch selbst möglichst weit über das Band gefächerte Kanäle, das erhöht eure Chancen, eine dickere Störung zu umgehen. Im Grunde reicht es aber, unter "Advanced Settings" 8 Hopping-Kanäle zufällig auswählen zu lassen.
Noch was: Wenn ihr zusammen mit Freunden OpenLRS fliegen wollt, dann klärt unbedingt ab, wer welche Kanäle nutzt. Ja, im Grunde muss man das nicht machen, Hopping und so, klar, aber auf UHF ist das nun mal was anderes als auf 2,4Ghz. Und auf UHF sollte man schon darauf achten, sich nicht gegenseitig zu stören - vor allem, wenn es so kinderleicht einstellbar ist.
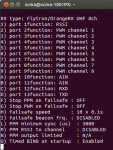
Wenn ihr etwas an eurem Empfänger konfigurieren wollt, dann müsst ihr ihn jetzt griffbereit haben. Sobald ihr auf den Reiter mit "RX" klickt, werdet ihr aufgefordert, den Empfänger einzuschalten. Tut dies, und der Sender baut via Funk eine Verbindung zum Empfänger auf. Das Konfigurations-Menü des Empfängers sieht folgendermaßen aus:
Wieder habt ihr jede Menge Knöpfe zum drann rumspielen. Was sie genau machen:
Basic Settings:
Failsafe Settings
Beacon Setting
Chanel Output
- Minimum PPM sync Time PPM-Sync-Zeit. Konnte hierzu keine weiteren Informationen finden, womöglich für experimentelle Zwecke. Für Naza, APM und co. sollte eigentlich 3000 als Standard passen. hoffe ich mal.
- Inject RSSI on servo channel Hier könnt ihr einen Kanal auswählen, auf dem später ein Servo angeschlossen ist, das euch anzeigt, wie stark euer RSSI ist. Dieses Servo könnt ihr dann am Blickfeldrand eurer FPV-Kamera montieren, und könnt so auch ohne datenfressende Telemetrie oder OSD sehen, wie stark euer Fernsteuersignal ist.
- Always bind on startup Diesen Modus bitte aktiviert lassen. Er beschreibt, dass euer Empfänger nach dem Einschalten für 0,5 Sekunden in den Bind-Modus geht, und erst dann normal arbeitet. Damit spart ihr euch herumfummeln mit Jumpern, wenn ihr den Empfänger binden oder mit dieser App programmieren wollt. Sollte der Empfänger jedoch einen BEC-Zusammenbruch erleben, wird er beim Reboot ebenfalls erst 0,5 Sekunden in den Bind-Mode gehen, daher auf eine ausreichend dimensionierte Stromversorgung achten!
Failsafe Settings
- Failsafe Delay: Die Zeit, bis der Empfänger nach einem Signalausfall den Failsafe reinkickt. Standardmäßig ist er auf eine Sekunde eingestellt, wie die Kalkulation "10x0,1" bereits vermuten lässt.
- Stop PWM on Failsafe: Der Empfänger stellt sich für alle angeschlossenen Geräte einfach tot, sobald er kein Signal mehr von der Fernsteuerung hat. Servos halten nicht die Position, sondern lassen sich frei herumdrehen, als wären sie stromlos.
- Stop PPM on Failsafe: Bedeutet, dass im Falle eines Signalausfalls kein Summensignal mehr ausgegeben wird. Wie die dahinter hängende Flugsteuerung drauf reagiert, müsst ihr ausprobieren. Manche aktivieren daraufhin ihren eigenen Failsafe (z.B. RTH), andere drehen am Rad und fallen vom Himmel. Habe diese Funktion selbst noch nicht getestet.
Beacon Setting
- Beacon frequency: Der "Beacon" ist ein Peilsendermodus, in welchen der Empfänger verfällt, wenn er für länger als ein paar Sekunden kein Signal mehr von der Fernsteuerung erhält. Hierbei sendet er drei unterschiedliche Tonhöhen auf drei unterschiedlichen Sendeleistungen aus, sodass man abschätzen kann, wie nahe man der Absturzstelle ist.
Wenn ihr diesen Modus aktiviert, wählt "PMR" (europäische Walkietalkies) und den gewünschten Sendekanal ein.
PMR-Walkietalkies gibt es bereits für 25€ bei Amazon, allerdings ist dieser Modus im Vergleich zu GPS-GSM-Peilsendern, welche die exakten Koordinaten via SMS an den Piloten sendet, fast schon lächerlich unpräzise. Wer kein Walkietalkie herumliegen hat, sollte sich die Investition sparen und zu einem aktuellen GPS-Tracker greifen. - Beacon interval Die Zeit in Sekunden zwischen den Aussendungen. Muss nicht geändert werden.
- Beacon deadtime Die Zeit in Sekunden, bis er dem einfachen Failsafe den Beacon-Mode hinzuschaltet.
--> Der Beacon ist leider nicht legal nutzbar, da "selbstgebasteltes" und alles, was kein Handfunkgerät ist, in diesem Band nicht funken darf. Genaueres dazu gibt es hier, danke an dd8ed für die Aufklärung!
Chanel Output
- Das sind die einzelnen Ausgänge an eurem (Orange oder FlytronV2)-Empfänger. Beachtet, dass die Ausgänge aufgrund vom RSSI um einen Port nach oben verschoben sind - Port 2 führt z.B. zur Konfiguration von Kanal 1. Ihr könnt hier jedem Empfängerport ein beliebiges Servosignal zuweisen. Ideal auch, wenn man bereits alles in den neuen Nuri einlaminiert hat, und dann feststellt, dass man zwei Servoanschlüsse verdreht hat. Einfach den Sender an den Computer, Terminal auf, Nuri einschalten, Kanäle neu zuweisen, speichern, fertig!
Alle Kanäle hinter Port 9 (Kanal 8) sind experimentelle Ports, womöglich auch die für das FrSky-System. Wer sich hierfür interessiert, muss leider selbst auf Info-Suche gehen, ich sehe keinen Nutzen für den Ottonormalpiloten.
Damit habe ich z.B. heute schon festgestellt, dass meine GoPro Hero2 entgegen diverser Youtube-Berichte 100% sauber ist, die HoryzonHD V3, wenn ich sie komplett mit Alufolie einwickle, auch UHF-Freundlich ist UND dass mein Autoschlüssel auf exakt 434 Mhz sendet, aber ziemlich weit streut.
Nachdem wir uns durch das ganze System durchgearbeitet haben, noch einmal oben auf "Disconnect" klicken und den Sender abstecken - Großartig, das System ist nun auf legalen Frequenzen und Leistungen unterwegs! Viel Spaß! =)
B II. - Alternative zur Chrome-App: Teraterm
Dieser Teil wird vorerst nicht weiter geupdated! Sollte sich etwas geändert haben und ihr braucht Hilfe, könnt ihr mich gerne anschreiben.
Dies hier ist nicht ganz so easy wie der obere Teil, hauptsächlich wegen dem schwierigen Öffnen des Bind-Modes in Kombination mit dem Terminal. Das Arduino-interne Serial-Terminal ist sehr kooperationsunwillig, daher brauchen wir Alternativsoftware. Da ich keinen Mac besitze und die Linux-Only-Nutzer vermutlich mit dem Tipp "sudo apt-get install minicom" und "minicom -s" eh schon bedient sind, folgt nun die Anleitung für Windows:
1. Installation und Konfiguration des Terminals
2. Versetzen des Sendermoduls in den Bind-Mode
Ich habe eine ganze Zeit gebraucht, bis ich verstand, was Kha mit seiner sehr kurzen Anleitung auf der OpenLRSng-Projektseite meinte.
Es gibt zwei Zusammensteck-Reihenfolgen, wie man in das Menü gelangen kann. Option 1 ist im Grunde einfacher, weil kein Zeitdruck da ist, aber es gibt Leute (wie z.B. mich), die dank diverser Umbauten am TX-Modul nicht mehr so einfach gleichzeitig die Bind-Taste drücken und das FTDI-Modul am Sender anschließen können. Ich nutze daher meist Option 2.
_________
Option 1:
Option 2:
*
Wenn ihr es ins Menü geschafft habt: Glückwunsch! Wenn nicht - lasst euch nicht unterkriegen!
3. Konfiguration
Nun zum Menü: Wenn ihr etwas ändern wollt, drückt die Zahl oder den Buchstaben des Menüpunktes, den ihr ändern wollt. Unterhalb des Menüs erscheint euer Kursor, ihr gebt den neuen Wert ein, und drückt Enter zum temporären sichern (vergesst nicht das abschließende Speichern!)
Die einzelnen Menüpunkte erklärt:
Mein Setup findet ihr oben in dem Screenshot des Menüs. (Wehe jemand klaut meinen RF magic! )
(Wenn ihr nur den Sender neu programmieren wollt, dann könnt ihr den noch folgenden Abschnitt ignorieren und direkt die Taste "S" zum speichern drücken, das Terminal schließen, warten bis die LED am Sender nicht mehr konstant leuchtet und dann den Sender abschließen.)
______________
3.5 Neu: Empfängerkonfiguration!
Und jetzt kommt Magie ins Spiel: Drückt einmal am Computer die Taste Z, und schaltet anschließend euren OpenLRS-Empfänger ein. Der TX baut nun via Funk eine Verbindung zum RX auf, und es öffnet sich folgendes Menü:
Huzzaa! "The fun has been doubled!"
Kurze Erklärung:
--> Abschließend drückt ihr einmal die Taste "S", erst dann sind eure Einstellungen im Empfänger gespeichert!
Drückt ESC, um wieder zurück zum Sender-Menü zu kommen. Prüft die Einstellungen dort noch einmal, drückt wieder "S" um auch die Sendereinstellungen zu speichern, und schließt das Terminal.
Beachtet, dass man nach jeder Änderung im Menü alle Empfänger neu an den Sender binden muss, weil er ein neues Passwort hat. Wenn ihr den Empfänger neu bindet, werden auch automatisch alle anderen Einstellungen die ihr vorgenommen habt auf den Empfänger übertragen - außer die empfängerspezifischen Einstellungen aus dem Empfängermenü, versteht sich.
Glückwunsch, das System ist nun auf legalen Frequenzen und Leistungen unterwegs! Viel Spaß! =)
1. Installation und Konfiguration des Terminals
- Ladet euch die OpenSorce-Software Teraterm (http://www.heise.de/download/teraterm-pro.html) herunter und installiert sie. Ihr kennt das: Weiter, akzeptiere, Weiter, Weiter, Weiter, Fertig.
- Schließt den FTDI-Adapter an dem Computer an.
- Startet das Programm. Wählt in dem Fenster, das euch entgegenspringt, unten "Serial" und den COM-Port aus, an dem euer Gerät hängt. (Ist derselbe wie bei Arduino)

- Oben in der Leiste auf "Einstellungen" -> "Serieller Port" -> "Baud rate" auf 115200 setzen, sonst nichts ändern und mit "Ok" bestätigen.


- Wieder oben in der Leiste "Einstellungen" -> "Setup sichern" -> Schaltfläche "Speichern". Sonst nichts ändern, das Programm überschreibt damit automatisch die Standard-Einstellungen, mit denen es startet. Und genau das wollen wir.

- Teraterm schließen, FTDI-Adapter abschließen, Teraterm testweise neu starten. Wenn es sich beschwert, dass der COM-Port fehlt, habt ihr alles richtig gemacht.
2. Versetzen des Sendermoduls in den Bind-Mode
Ich habe eine ganze Zeit gebraucht, bis ich verstand, was Kha mit seiner sehr kurzen Anleitung auf der OpenLRSng-Projektseite meinte.
Es gibt zwei Zusammensteck-Reihenfolgen, wie man in das Menü gelangen kann. Option 1 ist im Grunde einfacher, weil kein Zeitdruck da ist, aber es gibt Leute (wie z.B. mich), die dank diverser Umbauten am TX-Modul nicht mehr so einfach gleichzeitig die Bind-Taste drücken und das FTDI-Modul am Sender anschließen können. Ich nutze daher meist Option 2.
_________
Option 1:
- FTDI-Adapter an den Computer anschließen.
- Terminal starten.
- Bind-Knopf drücken, FTDI-Adapter an Sender anschließen.
- Warten bis die LED am Sender dauerhaft leuchtet, dann den Knopf loslassen und am PC enter drücken. Daraufhin sollte ein Menü erscheinen.*
Option 2:
- Markiert Teraterm auf eurem Desktop, sodass ihr nur noch auf die Enter-Taste hauen müsst, um es zu aktivieren. Dieser Schritt ist wichtig, ihr habt später keine Zeit mit dem Mauszeiger nach dem Teraterm-Icon zu suchen.
- Schließt den FTDI-Adapter am Sender an, drückt und haltet die Bind-Taste.
- Schließt das USB-Kabel des FTDI-Adapters an den Computers an. Wartet, bis die LED konstant leuchtet. Dann drückt SOFORT die Enter-Taste des Computers, um das Terminal zu starten. (Das Terminal startet nur ohne Fehlermeldung, wenn es einen COM-Port erkennt.)
- Die LED geht kurzzeitig aus. Wartet, bis sie wieder konstant leuchtet, lasst dann den Bind-Knopf los und drückt am Computer nochmal auf die Enter-Taste. Daraufhin sollte ein Menü erscheinen.*
*
Wenn ihr es ins Menü geschafft habt: Glückwunsch!
Wenn nicht - lasst euch nicht unterkriegen! 3. Konfiguration
Nun zum Menü: Wenn ihr etwas ändern wollt, drückt die Zahl oder den Buchstaben des Menüpunktes, den ihr ändern wollt. Unterhalb des Menüs erscheint euer Kursor, ihr gebt den neuen Wert ein, und drückt Enter zum temporären sichern (vergesst nicht das abschließende Speichern!)
Die einzelnen Menüpunkte erklärt:
- Base Frequency: Die Basisfrequenz des OpenLRS. Tragt hier 433050000 ein. Ich hab euch da was schönes gemalt zur Erklärung, hier: Turm...
- RF Magic: Das ist das "Passwort", welches der Sender beim Binden an den Empfänger übermittelt, sodass dieser nur auf "seinen" Sender hört. Dieses Passwort wird sowieso jedes mal durchgewürfelt, wenn man etwas via Terminal ändert, also nichts ändern. Sollte hier etwas wie "0xDEADFEED" oder ähnlich drinnen stehen fehlt dieser noch, drückt daher einmal die Taste "R", um einen zufälligen RF-Magic zuzuweisen.
- RF Power: Die Sendeleistung, von 0 bis 7. Kurz eine Auflistung, was was ist:
7 = 100mw
6 = 50mw
5 = 25mw
4 = 13mw
3 = 6mw
2 = 3mw
1 = 1,6mw
0 = 1,3mw
Unsere Wahl ist die Nummer 3, also 6 Milliwatt. Das entspricht 8 dBm Ausgangsleistung, in Kombination mit einem Dipol (z.B. DIY oder Nagoya-771) kommen wir damit perfekt auf die erlaubten 10 dBm EIRP. - Channel Spacing: Sollte nicht geändert werden. Dieser Punkt beschreibt den Abstand, den das System zwischen den Kanälen lässt. 5 steht für 50000 Hz.
- Hop Channels: Dieser Punkt ist wichtig. Ihr sagt hier dem System, zwischen welchen Frequenzen es herumspringen soll. Tragt also nach Möglichkeit möglichst weit voneinander entfernte Kanäle ein, um Störungen im Band möglichst gut zu umgehen. Ihr könnt bis zu 24 Kanäle eintragen, und die legalen Kanäle sind von 0 bis 34. Bedenkt, dass auf dem Band auch noch andere senden und empfangen, das ganze Band niederzumähen hilft hier nicht unbedingt - 6 Kanäle über das Band verteilt sind auch schon ziemlich sicher.
Wenn ihr mit Freunden zusammen fliegt, die sich auch ein OpenLRS umgebastelt haben, dann klärt unbedingt ab, wer welche Kanäle nutzt, damit sich die Systeme nicht gegenseitig stören.
Ach ja, eins noch: Ich kann nicht versprechen, dass bei Auswahl von Kanal 0 und Kanal 34, welche ja genau auf den Grenzen liegen, das System nicht doch minimal außerhalb des erlaubten Bereichs abstrahlt. Meidet daher bitte Kanal 0 und Kanal 34. - Baudrate: Kritischer Punkt. Ihr habt die Optionen 0, 1 und 2:
0 = hohe Reichweite, wenig Daten
1 = mittlere Reichweite, mittlere Daten
2 = "kürzere" Reichweite, viele Daten.
Ich selbst hatte bisher keine Zeit, professionell den Reichweitenunterschied zu messen, das OpenLRS übertrifft auf 1 jedoch immernoch deutlich eine 2,4Ghz-Fernsteuerung.
Je weniger Daten übertragen werden, desto mehr Zeitverzögerung habt ihr zwischen der Steuereingabe an der Fernsteuerung und der Reaktion des Servos. Die Aktualisierungsrate in Hz könnt ihr unten am Menü ablesen. Wie viel ihr da aushaltet, ist eure Sache. Mein provisorischer Test hat ergeben, dass zwischen 0 und 1 kaum ein Unterschied ist, zwischen 1 und 2 aber ein ziemlich großer. Ich empfehle Setting 1 (ohne Telemetrie), nichts geht über smooth und sofort reagierende Servos. - Channel Config: Hier wird die Kanalzahl eingestellt. Meines Wissens ist der Unterschied zwischen zusammenaddierten und ganzen Zahlen, dass die zusammenaddierten zwischen vollwertigen und schalt-Kanälen unterscheiden. Zum Beispiel: 4 Kanäle + 4 Schalter, während 8 wirklich volle 8 proportionale Kanäle liefert. Die ganzen Nuri-Piloten nutzen meist eh nur 3 Kanäle (Motor + 2 Servos), weshalb die 4+4-Option hier ausreicht, so Sachen wie Kamera-Auslöser oder HH/ACC können nach wie vor auf den Schalter-Kanälen gesteuert werden. Faustregel auch hier: Je weniger übertragen werden muss, desto schneller kommen die Daten bei den Servos an, siehe die unter "Baudrate" erwähnte Hz-Zahl.
- Telemetry: Mein Lieblingspunkt: Wenn man es aktiviert, warnt es einen wenn man an die Reichweitengrenze fliegt (Verlorene Pakete = Piepen), allerdings bedeutet es auch, dass die Servoaktualisierungsrate halbiert wird - wodurch ihr die Baudrate hochdrehen müsst, was euch wiederum massiv Reichweite kostet. Aktuell bin ich der Meinung, dass man das nicht braucht, weil das OLRS sowieso eine enorme Reichweite hat, die man nicht so einfach mal bricht. Allerdings wäre es praktisch bei Störungen, da das piepen bei verlorenen Paketen im Gegensatz zu RSSI auch mitteilt, wenn das Band zu stark "verseucht" ist.
Die einzige Telemetriefunktion bisher ist der Rangebeep. Wer sich damit sicherer fühlt, der aktiviert es, wer nicht, der nicht. - FrSky emulation: Diesen Menüpunkt konnte ich noch nicht selbst erproben - er schaltet dem OpenLRS eine Emulation der FrSky-Telemetrie hinzu. Sprich, wenn ihr ein paar Sensoren an euren aktuellen FrSky-Empfänger angeschlossen habt und auf OpenLRS umsteigt, könnt ihr diese Telemetriesensoren weiter nutzen! Außerdem kann euch eine Fernsteuerung, die euch zuvor noch die RSSI-Werte des FrSky-Systems angezeigt hat, nun die OpenLRS-RSSI-Werte anzeigen.
Über die genaue Anbindung der Module an Sensoren und Fernsteuerung konnte ich noch nichts finden, meines Wissens läuft es über die TX- und RX-Ports, an welche auch der FTDI-Adapter zum programmieren oder fürs Terminal angeschlossen wird. Vermutlich muss hierzu auch die normale Telemetrie aktiviert sein. Wie geschrieben, ich besitze kein FrSky-System, und kann es daher nicht ausprobieren. - Serial Baudrate: Nicht verändern. Erinnert ihr euch an die Baudrate, die ihr in Teraterm eingestellt habt? Genau. Kein Grund, es zu ändern.
Mein Setup findet ihr oben in dem Screenshot des Menüs. (Wehe jemand klaut meinen RF magic!
)(Wenn ihr nur den Sender neu programmieren wollt, dann könnt ihr den noch folgenden Abschnitt ignorieren und direkt die Taste "S" zum speichern drücken, das Terminal schließen, warten bis die LED am Sender nicht mehr konstant leuchtet und dann den Sender abschließen.)
______________
3.5 Neu: Empfängerkonfiguration!
Und jetzt kommt Magie ins Spiel: Drückt einmal am Computer die Taste Z, und schaltet anschließend euren OpenLRS-Empfänger ein. Der TX baut nun via Funk eine Verbindung zum RX auf, und es öffnet sich folgendes Menü:
Huzzaa! "The fun has been doubled!"
Kurze Erklärung:
- 1) bis 9): Das sind die einzelnen Ausgänge an eurem (Orange oder FlytronV2)-Empfänger. Beachtet, dass die Ausgänge aufgrund vom RSSI um einen Port nach oben verschoben sind - drücken der Taste 2 führt z.B. zur Konfiguration von Kanal 1. Ihr könnt hier jedem Empfängerport ein beliebiges Servosignal zuweisen. Ideal auch, wenn man alles in den neuen Nuri einlaminiert hat, und dann feststellt, dass man zwei Servoanschlüsse verdreht hat. Einfach den Sender an den Computer, Terminal auf, Nuri einschalten, Kanäle neu zuweisen, speichern, fertig!
- A) bis D): "Experimentelle Ports", von welchen ich nicht wirklich weiß, wo sie auf dem Board sitzen. Für den Ottonormalpiloten nutzlos.
- Stop PPM on Failsafe: Bedeutet, dass im Falle eines Signalausfalls kein Summensignal mehr ausgegeben wird. Wie die dahinter hängende Flugsteuerung drauf reagiert, müsst ihr ausprobieren. Manche aktivieren daraufhin ihren eigenen Failsafe (z.B. RTH), manche drehen am Rad und fallen vom Himmel. Habe diese Funktion selbst noch nicht getestet.
- Stop PWM on Failsafe: Dasselbe wie bei PPM: Der Empfänger stellt sich für alle angeschlossenen Geräte einfach tot, sobald er kein Signal mehr von der Fernsteuerung hat.
- Failsafe Speed: Die Zeit, bis der Empfänger nach einem Signalausfall den Failsafe reinkickt. Standardmäßig ist er auf eine Sekunde eingestellt, wie die Kalkulation "10x0,1" bereits vermuten lässt.
- Failsafe beacon freq.: Der "Beacon" ist ein Peilsendermodus, in welchen der Empfänger verfällt, wenn er für länger als ein paar Sekunden kein Signal mehr von der Fernsteuerung erhält. Hierbei sendet er drei unterschiedliche Tonhöhen auf drei unterschiedlichen Sendeleistungen aus, sodass man abschätzen kann, wie nahe man der Absturzstelle ist.
Wenn ihr diesen Modus aktiviert, gebt "P" (europäische Walkietalkies) und den gewünschten Kanal ein. Also z.B. "P1" oder "P2".
Mit einem Druck auf Enter zeigt er euch dann die Frequenz an, auf der er Peilsenden wird. Er gibt euch auch die Option, den Intervall (in Sekunden) einzustellen, in dem er seine Signale aussendet.
PMR-Walkietalkies gibt es bereits für 25€ bei Amazon, allerdings ist dieser Modus im Vergleich zu GPS-GSM-Peilsendern, welche die exakten Koordinaten via SMS an den Piloten sendet, fast schon lächerlich unpräzise. Wer kein Walkietalkie herumliegen hat, sollte sich die Investition sparen und zu einem aktuellen GPS-Tracker greifen. --> Edit: Nicht legal nutzbar, siehe weiter oben im Text. - PPM RSSI to channel: Hier könnt ihr einen Kanal auswählen, auf dem später ein Servo angeschlossen ist, das euch anzeigt, wie stark euer RSSI ist. Dieses Servo könnt ihr dann am Blickfeldrand eurer FPV-Kamera montieren, und könnt so auch ohne datenfressende Telemetrie oder OSD sehen, wie stark euer Fernsteuersignal ist.
- PPM Output Limited Hiermit könnt ihr euer PPM-Signal auf 8 Kanäle herunterdrosseln. Noch nicht getestet.
- Timed BIND at startup Diesen Modus bitte aktiviert lassen. Er beschreibt, dass euer Empfänger nach dem Einschalten für 0,5 Sekunden in den Bind-Modus geht, und erst dann normal arbeitet. Damit spart ihr euch herumfummeln mit Jumpern, wenn ihr den Empfänger binden oder in dieses Terminal gelangen wollt. Sollte der Empfänger jedoch einen BEC-Zusammenbruch erleben, wird er beim Reboot ebenfalls erst 0,5 Sekunden in den Bind-Mode gehen.
--> Abschließend drückt ihr einmal die Taste "S", erst dann sind eure Einstellungen im Empfänger gespeichert!
Drückt ESC, um wieder zurück zum Sender-Menü zu kommen. Prüft die Einstellungen dort noch einmal, drückt wieder "S" um auch die Sendereinstellungen zu speichern, und schließt das Terminal.
Beachtet, dass man nach jeder Änderung im Menü alle Empfänger neu an den Sender binden muss, weil er ein neues Passwort hat. Wenn ihr den Empfänger neu bindet, werden auch automatisch alle anderen Einstellungen die ihr vorgenommen habt auf den Empfänger übertragen - außer die empfängerspezifischen Einstellungen aus dem Empfängermenü, versteht sich.
Glückwunsch, das System ist nun auf legalen Frequenzen und Leistungen unterwegs! Viel Spaß! =)
(Vieles noch ungetestet und nur von der Github-Projektseite auf Deutsch übertragen)
1. Empfänger als Sender nutzen.
Sehr praktisch, wenn man einen Futaba- oder Hitec-Sender hat, und trotzdem das Orange-Equipment nutzen will, denn der Empfänger passt problemlos in den Modulschacht der Fernsteuerung. Oder auch für Fernsteuerungen, die gar keinen Modulschacht haben. Dazu muss der Empfänger anders via Arduino programmiert werden, unter dem dritten Bild in diesem HowTo steht wie es gemacht wird.
An der Steckerleiste, an der normalerweise die Servos angeschlossen werden, speist man nun an Servoanschluss 4 die 5Volt, Minus und PPM der Fernsteuerung in den Empfänger, und zwar genau so, wie man normalerweise auch ein Servo anschließt.
Den Binding-Knopf kann man simulieren, indem man zwischen dem Signal-Ausgang von Kanal 3 und GND eine Verbindung herstellt. (Jumper, Taster, ...)
Kha schreibt noch:
"buzzer via transistor on 3rd slot (ch2) (active high)", sprich, man kann auch den Summer via einem Transistor nachrüsten. Irgendwie. ^^
An der Steckerleiste, an der normalerweise die Servos angeschlossen werden, speist man nun an Servoanschluss 4 die 5Volt, Minus und PPM der Fernsteuerung in den Empfänger, und zwar genau so, wie man normalerweise auch ein Servo anschließt.
Den Binding-Knopf kann man simulieren, indem man zwischen dem Signal-Ausgang von Kanal 3 und GND eine Verbindung herstellt. (Jumper, Taster, ...)
Kha schreibt noch:
"buzzer via transistor on 3rd slot (ch2) (active high)", sprich, man kann auch den Summer via einem Transistor nachrüsten. Irgendwie. ^^
2. Summensignal am Empfänger
Update: Im Configurator oder Terminal den Empfänger ansprechen und diesem auf Kanal 4 (oder 5?) das Summensignal zuweisen. Es ist nur ein Pin in der Lage PPM auszugeben, 4 oder 5, einer von beiden hat die Option zur Auswahl.
3. Failsafe setzen
Dazu alle Kanäle in die Failsafe-Stellung bringen, und die Taste am Sender für ~1 Sekunde drücken, sobald entweder die rote LED leuchtet oder der Summer piept ist das Failsafe gespeichert.
4. Binding!
Ganz wichtig, fast vergessen. Hierzu den Knopf am Sender drücken, Fernsteuerung einschalten, warten bis die rote LED leuchtet, dann loslassen. Wenn ihr einen Summer habt, wird dieser nun "PiepPiepPiep..." machen. Sobald er das macht, den Empfänger einschalten, 5 bis 10 Sekunden warten, beide Seiten neu starten - fertig.
Ab V3.1 hört der Sender auf zu piepsen, sobald der Empfänger gebunden ist. Ihr könnt dann gleich beide neu starten, ohne zu warten.
Ab V3.1 hört der Sender auf zu piepsen, sobald der Empfänger gebunden ist. Ihr könnt dann gleich beide neu starten, ohne zu warten.
5. Spektrum Analyser (Experimental)
Gelöscht. Es gab mal ne eigene Spektrum-Analyser-App für Chrome, inzwischen wurde die aber von der Configurator-App abgelöst.
6. Antennen:
Ich zitiere jemanden von RCgroups: "Destroy those Antennas immediately!" - er bezog sich auf die grausamen Hobbyking-Antennen, die beim Orange-LRS dabei sind. An der Fernsteuerung scheinen viele eine Nagoya 771 einzusetzen, vielleicht werde ich mir da auch eine organisieren - die ist dann immerhin robuster und nicht so umständlich wie mein aktuelles "Dipol-Konstrukt".
Ein paar Anregungen für Eigenbau-Antennen:
- SanderStyle-Monopol-Antenne: http://www.rcgroups.com/forums/showpost.php?p=16104039&postcount=652 Da es bereits öfters schlechte Erfahrungen (insbesondere bei Verwendung von Telemetrie) bei der Nutzung von Monopolen gab, wird der Bereich eingegraut. Monopole wirklich nur einsetzen, wenn es platzmäßig nicht anders realisierbar ist. Sonst unbedingt einen Dipol oder eine Turnstile einsetzen, danke.
- Simpler Dipol: http://fpvlab.com/forums/showthread.php?3156-433MHz-Half-wave-dipole-for-LRS
- Noch simplererer Dipol alá hitec: http://sdrv.ms/17Ps1Lv
- IBcrazy Turnstile: http://www.rcgroups.com/forums/showthread.php?t=1417408
...aktuell würde ich am Sender eine Nagoya einsetzen (wenn ich das Geld hätt), und am Empfänger einen Dipol.
*(Danke an AndreasL90 und fofi1 für den Hinweis bezüglich der Monopole!)
Ein paar Anregungen für Eigenbau-Antennen:
- SanderStyle-Monopol-Antenne: http://www.rcgroups.com/forums/showpost.php?p=16104039&postcount=652 Da es bereits öfters schlechte Erfahrungen (insbesondere bei Verwendung von Telemetrie) bei der Nutzung von Monopolen gab, wird der Bereich eingegraut. Monopole wirklich nur einsetzen, wenn es platzmäßig nicht anders realisierbar ist. Sonst unbedingt einen Dipol oder eine Turnstile einsetzen, danke.
- Simpler Dipol: http://fpvlab.com/forums/showthread.php?3156-433MHz-Half-wave-dipole-for-LRS
- Noch simplererer Dipol alá hitec: http://sdrv.ms/17Ps1Lv
- IBcrazy Turnstile: http://www.rcgroups.com/forums/showthread.php?t=1417408
...aktuell würde ich am Sender eine Nagoya einsetzen (wenn ich das Geld hätt), und am Empfänger einen Dipol.
*(Danke an AndreasL90 und fofi1 für den Hinweis bezüglich der Monopole!)
7. Vorsicht vor Brownouts!
Alle bisherigen OpenLRS-Empfänger reagieren ziemlich empfindlich auf Unterspannung, sprich, wenn das BEC ganz kurz unter eine bestimmte Spannung sinkt. Testet vor allem bei Digitalservos unbedingt bevor ihr das erste mal fliegt, ob alle Servos zusammen nicht evtl. doch das BEC in die Knie zwingen können. Ihr könnt versuchen, einen "etwas größeren Kondensator" parallel an das Regler-BEC anzuschließen um die Spannung zu stabilisieren, oder am besten gleich den Empfänger an eine eigene separate Stromversorgung hängen. Sicher ist sicher. Der Empfänger selbst läuft übrigens problemlos direkt von 2S oder 3S Lipos.
Ein kleines Demovideo (Video-Description lesen):
http://youtu.be/eJsmRvCShpg
________________________________________________________________________________________
D. Danksagung, ohne Reihenfolge:
- Natürlich Kha, welcher die hervorragende OpenLRSng-Firmware geschrieben hat.
- IBCrazy, welcher in Kooperation mit FliteTest gezeigt hat, dass das OpenLRS gar nicht so schlimm ist, wie ich es in Erinnerung hatte. Er war der Zündfunke.
- Marc (RChacker), welcher mit seinen SEHR eindrücklichen Reichweitentests des OpenLRS mit OpenLRSNG-Firmware dafür gesorgt hat, dass ich mich weiter in dieses Thema eingelesen habe. Ohne ihn gäbe es diesen Beitrag nicht.
- Rangarid, welcher 2011 hier im Forum den ersten OpenLRS-Thread eröffnet, eine Menge Entwicklerarbeit in das System gesteckt und auch als erster bei der Bundesnetzagentur angefragt hat. Danke dir!
E. Sonstiges
"Warum hast du das jetzt gemacht?"
Nun, ich sehe hier mein altes GF-Highend-2G4-Set herumstauben, und es stört mich, dass ich es nicht mehr einsetzen kann, weil ich die Fernsteuerfrequenz auf 2G4 gewechselt habe. (Und meine Fatshark hat nen 2G4-RX). Im Vergleich zu dem, was ich unter 2G4-Video geflogen bin, ist meine Zeit unter 5G8 verschwindend gering.
Zweitens finde ich es echt schade, dass das Konzept OpenLRS gestorben ist, und zwar aus keinem wirklichen Grund. Ich hab mir den ganzen originalen 36-Seiten-Thread zum OpenLRS von 2011 reingezogen und keinen Grund gefunden, warum das Projekt "eingestellt" wurde - Nein, die Bundesnetzagentur hat uns für die Sache damals schon grünes Licht gegeben.
Das Problem lag woanders: Irgendwann ist die Stimmung im Thread gekippt, die ersten haben mangelhafte Platinen erhalten, nicht funktionsfähige Empfänger, erste Easystar-Verluste, zuckende Servos, irgendwer hat sein eigenes System parallel im selben Thread entwickelt, Chaos, Schokoladenregen, unzuverlässige Firmware, Schlammschlacht, keiner hat sich mehr gemocht und seither ist Funkstille.
Seither hat sich aber auch die Qualität des OpenLRS, vor allem der Software um Welten verbessert. Die OpenLRSng-Firmware von Kha stellt hier einen Quantensprung dar.
Es wird heute kaum beachtet, vielleicht wegen des im Vergleich zu „den Großen" sehr niedrigen Komplettpreises (2x RX) von 40 USD (Kost nix taugt nix), weil die Programmierung zu aufwendig erscheint oder es gleich mit dem „UHF IST ILLEGAL!“-Vorurteil-Hammer abgeschmettert wird.
Und ehrlich: Welches „FPV-Team“ fliegt OpenLRS? Update: Die Dark Side Crew fliegt OpenLRS!
Gruß,
hitec
Anhänge
-
 958,6 KB Aufrufe: 732
958,6 KB Aufrufe: 732
Zuletzt bearbeitet:



