Hi,
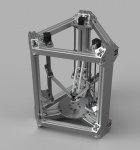
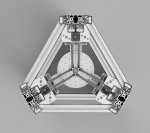
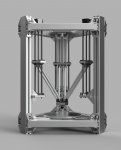
wie der Titel schon sagt, möchte ich hier die Konstruktion und den Bau einer kleinen Deltafräse dokumentieren.
Aber bevor ich loslege will ich mich noch kurz vorstellen:
Ich heiße Stefan, bin 20 Jahre alt und studiere Maschinenbau in Hamburg.
Seit über 11 Jahren bin ich Modellflieger und lese bei euch seit 2011 fleißig mit")
Wie bin ich überhaupt darauf gekommen?
Vor nicht ganz einem Jahr bin ich beim wahllosen scrollen durch ein Forum mal wieder auf einen Delta 3D-Drucker gestoßen. Darauf hin habe ich mich dann gefragt, ob es sowas nicht auch als Fräse gibt. Es dauerte nicht lang bis ich die ersten Videos eines 5-Achsen Modells gefunden hatte, was zugegeben sehr cool aussah
Darauf hin hab ich mich dann ein bisschen intensiver mit der Thematik beschäftigt.
So, jetzt aber zum interessanten Teil:
Zuerst habe ich mich mit der Armlänge beschäftigt. Wenn man ein bisschen googelt, findet man eine Seite über das Thema Delta-Geometrie bei 3D-Druckern. Auf dieser heißt es: Je größer der minimal Winkel zwischen Grundplatte und Arm, umso stabiler ist der Effektor. Je flacher der Winkel, umso schneller ist er.
Da leider nicht wirklich beschrieben war wie diese Erkenntnisse zu Stande gekommen sind und die Belastungen von Drucker und Fräse nicht vergleichbar sind, habe ich ein vereinfachtes Modell des Effektors aufgestellt.
Durch ein bisschen überlegen habe ich die ersten Grundparameter wie folgt festgelegt:
Durchmesser des Arbeitskreises 200mm
Abstand der Armgelenke vom Effektormittelpunkt 30mm
Minimaler Abstand der Führungen (bzw. den Armgelenke) vom Effektor (bzw. dem anderen Gelenk) 40mm
Dann habe ich die aufgestellten Funktionen in Grapher eingegeben und habe die Funktion für eine Armlänge von 240 bis 350mm dargestellt. Außerdem habe ich die X-Koordinate des Effektors von 40mm bis 240mm animiert.
Das Ergebnis sieht man im folgenden Video:
[video=youtube;L-j59Dge18M]https://www.youtube.com/watch?v=L-j59Dge18M[/video]
Selbstverständliche habe ich die Simulation nochmal mit umgekehrt wirkenden Kräften etc. gemacht.
Das Ergebnis bleibt jedoch das Gleiche:
Die Kräfte in den Armen 2 und 3 (lila und blau) steigen am Rand des Arbeitskreises im vorderen Bereich auf einmal exponentiell. Außerdem steigen die Kräfte in den Armen mit zunehmender Armlänge an.
Was lernen wir daraus?
Die Aussage, dass ein größerer Winkel erhöhte Stabilität bedeutet, ist bei den Belastungen einer Fräse falsch.
Die optimale Armlänge befindet sich an der Stelle, an der die Funktion nicht mehr signifikant ansteigt.
In meinem Fall 260mm.
Für die Leute, die es interessiert, habe ich Fotos von meinem Freikörperbild und den Berechnungen angehängt. Beachtet bitte, dass meistens nur die erste Zeile der Rechnung relevant ist und so eingetippt wurde. Die ausformulierten Zeilen darunter können also Fehler enthalten.
Als nächstes werde ich mich um die Herzstücke aller Deltas kümmern: die Gelenke
Bitte verzeiht mir falls es nicht so oft updates gibt, aber Klausuren gehen leider vor
wie der Titel schon sagt, möchte ich hier die Konstruktion und den Bau einer kleinen Deltafräse dokumentieren.
Aber bevor ich loslege will ich mich noch kurz vorstellen:
Ich heiße Stefan, bin 20 Jahre alt und studiere Maschinenbau in Hamburg.
Seit über 11 Jahren bin ich Modellflieger und lese bei euch seit 2011 fleißig mit
Wie bin ich überhaupt darauf gekommen?
Vor nicht ganz einem Jahr bin ich beim wahllosen scrollen durch ein Forum mal wieder auf einen Delta 3D-Drucker gestoßen. Darauf hin habe ich mich dann gefragt, ob es sowas nicht auch als Fräse gibt. Es dauerte nicht lang bis ich die ersten Videos eines 5-Achsen Modells gefunden hatte, was zugegeben sehr cool aussah
Darauf hin hab ich mich dann ein bisschen intensiver mit der Thematik beschäftigt.
So, jetzt aber zum interessanten Teil:
Zuerst habe ich mich mit der Armlänge beschäftigt. Wenn man ein bisschen googelt, findet man eine Seite über das Thema Delta-Geometrie bei 3D-Druckern. Auf dieser heißt es: Je größer der minimal Winkel zwischen Grundplatte und Arm, umso stabiler ist der Effektor. Je flacher der Winkel, umso schneller ist er.
Da leider nicht wirklich beschrieben war wie diese Erkenntnisse zu Stande gekommen sind und die Belastungen von Drucker und Fräse nicht vergleichbar sind, habe ich ein vereinfachtes Modell des Effektors aufgestellt.
Durch ein bisschen überlegen habe ich die ersten Grundparameter wie folgt festgelegt:
Durchmesser des Arbeitskreises 200mm
Abstand der Armgelenke vom Effektormittelpunkt 30mm
Minimaler Abstand der Führungen (bzw. den Armgelenke) vom Effektor (bzw. dem anderen Gelenk) 40mm
Dann habe ich die aufgestellten Funktionen in Grapher eingegeben und habe die Funktion für eine Armlänge von 240 bis 350mm dargestellt. Außerdem habe ich die X-Koordinate des Effektors von 40mm bis 240mm animiert.
Das Ergebnis sieht man im folgenden Video:
[video=youtube;L-j59Dge18M]https://www.youtube.com/watch?v=L-j59Dge18M[/video]
Selbstverständliche habe ich die Simulation nochmal mit umgekehrt wirkenden Kräften etc. gemacht.
Das Ergebnis bleibt jedoch das Gleiche:
Die Kräfte in den Armen 2 und 3 (lila und blau) steigen am Rand des Arbeitskreises im vorderen Bereich auf einmal exponentiell. Außerdem steigen die Kräfte in den Armen mit zunehmender Armlänge an.
Was lernen wir daraus?
Die Aussage, dass ein größerer Winkel erhöhte Stabilität bedeutet, ist bei den Belastungen einer Fräse falsch.
Die optimale Armlänge befindet sich an der Stelle, an der die Funktion nicht mehr signifikant ansteigt.
In meinem Fall 260mm.
Für die Leute, die es interessiert, habe ich Fotos von meinem Freikörperbild und den Berechnungen angehängt. Beachtet bitte, dass meistens nur die erste Zeile der Rechnung relevant ist und so eingetippt wurde. Die ausformulierten Zeilen darunter können also Fehler enthalten.
Als nächstes werde ich mich um die Herzstücke aller Deltas kümmern: die Gelenke
Bitte verzeiht mir falls es nicht so oft updates gibt, aber Klausuren gehen leider vor
Anhänge
-
 1 MB Aufrufe: 24
1 MB Aufrufe: 24 -
 1,1 MB Aufrufe: 24
1,1 MB Aufrufe: 24 -
 1,1 MB Aufrufe: 24
1,1 MB Aufrufe: 24 -
 1,1 MB Aufrufe: 29
1,1 MB Aufrufe: 29