
Hallo zusammen,
ich möchte hier den Bau meines Oktokopters in V-Form von der Idee bis zum fertigen Fluggerät dokumentieren.
Ich werde erstmal die großen Meilensteine beschreiben, wenn weitere Details von Interesse sind, kann ich gern noch Bilder oder genauere Beschreibungen liefern.
Inspiriert durch einige Projekte (cutworx bei Mikrokopter, usw.) habe ich beschlossen mich an den Bau eines solchen Oktokopters zu wagen. Die Vorteile einer V-Form liegen ganz klar bei der guten Lageerkennung in großer Entfernung und der freien Sicht der Kamera.
Ein paar Kleinigkeiten wollte ich dabei etwas verbessern:
- Der Rahmen sollte nicht so filigran sein wie manch anderer - natürlich zu Lasten des Gewichts
- Die Propeller sollten nur die Außenrohre überstreichen, nicht aber die inneren Halter
Die Randbedingungen:
- Gewicht < 5kg (später)
- in meinen Kofferraum sollte er passen
- Propeller bis 12"
- Kamerahalterung mit Pitch und Roll
- erstmal die vorhandenen Motoren KDA20-20L mit AXI Kugellagern nutzen (für Gewicht < 3kg)
- Steuerung erstmal Flyduino Board mit MegapiratesNG
- genug Platz für Elektronikkomponenten im "inneren"
Hier das erste Anschauungsobjekt noch mit 10" Probs:

vorn 800mm und hinten 400mm breit
Also ging es im Sommerurlaub 2011 an die ersten Bestellungen:
- 4 x 1m 21mm/22mm 61g CFK Rohr
- 5 x 1,5mm 150mm*300mm CFK Platten
- 20 x Heckrohrhalter des Compass Atom 500
- 20 Alu Abstandsgalter 30mm ebenfalls vom Atom 500
- 10 Black Mantis 30A
- Gimbal von Kopterframe
Hier die Anordnung von Motoren und Geometrieachsen:

Dann ging es an die Zeichnung des Hauptframes. Das hat schon ein paar Stunden gekostet...
Erst auf´s Papier und dann mit dem Cutter angeritzt.


Dremel dremel schleif schleif und "schon" war der Tag vorbei: (für das nächste Frame hole ich mir eine CNC Fräse)


Nach dem Zusammenbau sieht er dann so aus:

EDIT
09.10.2012 Teil 2
So, dann wollen wir mal weiter dremeln
Von den 20 bestellten Heckrohrhaltern habe ich anfänglich 6 erhalten. Hier begann der Wahnsinn mit Zusagen welche sich von Monat zu Monat verschoben! ... na ja zum Schluss waren es 4 deutsche und zwei ausländische Shops bis ich alle zusammen hatte ...und sage und schreibe 5 Monate rum.
Diese Alpha Gelpads habe ich noch bestellt. Die sind wirklich super.
Als nächstes ging es an die inneren Rohre. Dazu habe ich die Rotorkreisebene mit den entsprechenden Abständen aufgezeichnet und mal zurecht gelegt.

Das dann für beide Seiten und schon sah das schon ganz manierlich aus.

Für die Aufnahme des Steuerung sollte es was windschnittiges sein und die Standardmaße der Platinen sollten berücksichtigt werden. Das kam dabei raus:

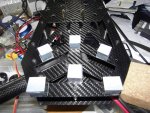
Nun kamen endlich die GelPads zum Verbau. Dazu habe ich kleine CFK Plättchen gedremelt und diese einseitig einfach aufgeklebt und die zweite Seite mit Sekundenkleber geklebt.

Diese werden dann mit doppelseitigem Klebeband (hält wie hölle) verwendet. So kann ich sie immer, falls notwendig, mit einer Rasierklinge dazwischen und sie unbeschadet entfernen.
Schön passgenau zusammen geklebt sieht es dann so aus:

Dann durfte ich endlich die Steller zusammen löten. Hoffentlich geht da nich mal einer kaputt, dann hätte ich schon 1-2 Stunden zu tun. Aber es ist bis heute nicht ein einziger zerstört worden.


... und schön merken, welche Kabel an welchen Motor gehören
Die Ober-, und Unterteile der Rohrverbinder an den Außenrohren habe ich am obigen Plan angezeichnet und mal wieder losgedremelt. Das ist was für die Ewigkeit! So werden die Kräfte aus allen Richtungen notfalls abgefangen.
Zur Info: Die Halterungen (zwei Halbschalen) mit Schrauben und Muttern wieden 25g. Die Dinger kann man bis zur Schmerzgrenze anziehen, ohne das was bricht.

Die LED´s zur Lageerkennung und Nachtflugfähigkeit habe ich nach einiger Suche auch gefunden. Bei den Kühlkörpern war ich schon ein bischen länger dran. 4 x 3,5W - 2 mal rot und zwie mal blau mit zwei separaten Stromquellen 700mA wegen der Redundanz. Eine rote ist zum zweiten mal zerstört worden, obwohl die 800mA vertragen soll. Nun habe ich 1000mA im Reich der Mitte bestellt - mal sehen.
Die Kühlkörper passen saugend in die Rohre. Als befestigung habe ich an allen Vertiefungen dünnen Spritschlauch eingeklemmt. Die Linse wird direkt in den Schlauch verschraubt und hält bombenfest. Die Bilder stammen vom LED-wechsel, also nicht wundern, dass schon alles fertig ist.


...und Ab ins Rohr.


...später dann noch verlötet.

So, nun wurde alles verheiratet. Das war eine schöne Feier und der für mich schönste Moment wärend der Bauphase.
(Da zu dieser Zeit immer noch nicht alle Halter geliefert wurden, musste ich meinen Atom 500 schlachten, damit ich wenigstens 4 Motoren verbauen konnte. So sah das eine ganze Zeit lang aus und ich hatte endlich Zeit micht um die Firmware zu kümmern.


...und von oben.

Über die Montage der Motorern habe ich auch viel gelesen und mich für eine Vibrationsentkopplung entschieden. Dazu habe ich die Gummis bestellt und die 32 inneren Hülsen angefertigt. Verbaut sieht es dann so aus:

Als Resultat würde ich sagen - es bringt ein bischen, aber die eigentliche Entkopplung bringen die Gelpads.
Genau in diesem Zustand bin ich die ersten male im Keller abgehoben Als Firmware habe ich die MultiWii genommen und die Mixer entsprechend angepasst. Die 4 Motörchen hatten schon zu kämpfen. Schubmessungen habe ich mit 1250g-1300g pro Motor gemessen - sollte also genügen.
Da immer noch 4 Halter plus der von meinem Atom gefehlt haben, könnte ich mich mit dem Gimbal bzw. dessen Befestigung befassen. Zum Glück und mit wenigen Änderungen könnte ich die Halterung so verdrehen und invertieren, dass ich sie cutworx-like (langgestreckt) zusammen bauen konnte. Das erkennt man später auf den Bildern. Normalerweise hängt ja das Gimbal unter einem Kopter, also die Aufhängung direkt über dem Schwerpunkt - hier leider nicht.
Also mal wieder eine Aufnahme gedremelt welche ich mit Gelpads befestigt habe. Man sieht sie hinten auf dem Frame liegen.
Hier mal ein paar Bilder von verschiedenen Positionen:





Die Ergebnisse waren so schon sehr gut, jedoch werden die vorderen Pads auf zug belastet was ich später noch geänder habe.
Bilder folgen.
Und eines schönen Tages klingelt es an der Tür - ein Paket aus Holland mit den letzten 5 Haltern. Puh!!!!!
Jetzt konnte endlich mal "richtig" geflogen werden. Zwar noch ohne Landegestell und Akkuhalter aber sonst ok.

UPDATE
16.10.2012 Teil 3
Hier die ersten Videos im Garten:
http://www.youtube.com/watch?v=zmTSsr06nN8
...und Onboard:
http://www.youtube.com/watch?v=75BCM6xjmvc&feature=channel&list=UL
Die Gelpads wollte ich nicht auf Dauer auf zug belasten, daher die erste Erweiterung:

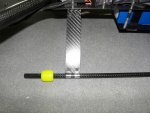
Das Landegestell besteht aus einem Aluhalter mit jeweils 2 CFK Streben außen. Am Ende ist das Rohr mit einer dünnen Edelstahl-Schelle befestigt.

Das Rohr wurde noch gegen ein CFK getauscht:

Jetzt musste noch ein bischen mehr Dampf her. Ich habe mich für Torxpower 2814-11 mit 700kV entschieden ca. 350W. Als Propeller habe ich CFK 12x3.8 bestellt. Mit den 12x3.8 bringt das 2,3kg Schub - und auf meinem Prüfstand einen großen Respekt.



So, das war erstmal hier nur noch zwei Videos. Weitere Infos füge ich zukünftig hinten an.
http://www.youtube.com/watch?v=MbMdfdP3QK0&feature=channel&list=UL
http://www.youtube.com/watch?v=XIFM-Iead_4&feature=channel&list=UL
Grüße,
Olli
ich möchte hier den Bau meines Oktokopters in V-Form von der Idee bis zum fertigen Fluggerät dokumentieren.
Ich werde erstmal die großen Meilensteine beschreiben, wenn weitere Details von Interesse sind, kann ich gern noch Bilder oder genauere Beschreibungen liefern.
Inspiriert durch einige Projekte (cutworx bei Mikrokopter, usw.) habe ich beschlossen mich an den Bau eines solchen Oktokopters zu wagen. Die Vorteile einer V-Form liegen ganz klar bei der guten Lageerkennung in großer Entfernung und der freien Sicht der Kamera.
Ein paar Kleinigkeiten wollte ich dabei etwas verbessern:
- Der Rahmen sollte nicht so filigran sein wie manch anderer - natürlich zu Lasten des Gewichts
- Die Propeller sollten nur die Außenrohre überstreichen, nicht aber die inneren Halter
Die Randbedingungen:
- Gewicht < 5kg (später)
- in meinen Kofferraum sollte er passen
- Propeller bis 12"
- Kamerahalterung mit Pitch und Roll
- erstmal die vorhandenen Motoren KDA20-20L mit AXI Kugellagern nutzen (für Gewicht < 3kg)
- Steuerung erstmal Flyduino Board mit MegapiratesNG
- genug Platz für Elektronikkomponenten im "inneren"
Hier das erste Anschauungsobjekt noch mit 10" Probs:
vorn 800mm und hinten 400mm breit
Also ging es im Sommerurlaub 2011 an die ersten Bestellungen:
- 4 x 1m 21mm/22mm 61g CFK Rohr
- 5 x 1,5mm 150mm*300mm CFK Platten
- 20 x Heckrohrhalter des Compass Atom 500
- 20 Alu Abstandsgalter 30mm ebenfalls vom Atom 500
- 10 Black Mantis 30A
- Gimbal von Kopterframe
Hier die Anordnung von Motoren und Geometrieachsen:
Dann ging es an die Zeichnung des Hauptframes. Das hat schon ein paar Stunden gekostet...
Erst auf´s Papier und dann mit dem Cutter angeritzt.
Dremel dremel schleif schleif und "schon" war der Tag vorbei: (für das nächste Frame hole ich mir eine CNC Fräse)
Nach dem Zusammenbau sieht er dann so aus:
EDIT
09.10.2012 Teil 2
So, dann wollen wir mal weiter dremeln
Von den 20 bestellten Heckrohrhaltern habe ich anfänglich 6 erhalten. Hier begann der Wahnsinn mit Zusagen welche sich von Monat zu Monat verschoben! ... na ja zum Schluss waren es 4 deutsche und zwei ausländische Shops bis ich alle zusammen hatte
...und sage und schreibe 5 Monate rum.Diese Alpha Gelpads habe ich noch bestellt. Die sind wirklich super.
Als nächstes ging es an die inneren Rohre. Dazu habe ich die Rotorkreisebene mit den entsprechenden Abständen aufgezeichnet und mal zurecht gelegt.
Das dann für beide Seiten und schon sah das schon ganz manierlich aus.
Für die Aufnahme des Steuerung sollte es was windschnittiges sein und die Standardmaße der Platinen sollten berücksichtigt werden. Das kam dabei raus:
Nun kamen endlich die GelPads zum Verbau. Dazu habe ich kleine CFK Plättchen gedremelt
und diese einseitig einfach aufgeklebt und die zweite Seite mit Sekundenkleber geklebt.
Diese werden dann mit doppelseitigem Klebeband (hält wie hölle) verwendet. So kann ich sie immer, falls notwendig, mit einer Rasierklinge dazwischen und sie unbeschadet entfernen.
Schön passgenau zusammen geklebt sieht es dann so aus:
Dann durfte ich endlich die Steller zusammen löten. Hoffentlich geht da nich mal einer kaputt, dann hätte ich schon 1-2 Stunden zu tun. Aber es ist bis heute nicht ein einziger zerstört worden.
... und schön merken, welche Kabel an welchen Motor gehören
Die Ober-, und Unterteile der Rohrverbinder an den Außenrohren habe ich am obigen Plan angezeichnet und mal wieder losgedremelt. Das ist was für die Ewigkeit! So werden die Kräfte aus allen Richtungen notfalls abgefangen.
Zur Info: Die Halterungen (zwei Halbschalen) mit Schrauben und Muttern wieden 25g. Die Dinger kann man bis zur Schmerzgrenze anziehen, ohne das was bricht.
Die LED´s zur Lageerkennung und Nachtflugfähigkeit habe ich nach einiger Suche auch gefunden. Bei den Kühlkörpern war ich schon ein bischen länger dran. 4 x 3,5W - 2 mal rot und zwie mal blau mit zwei separaten Stromquellen 700mA wegen der Redundanz. Eine rote ist zum zweiten mal zerstört worden, obwohl die 800mA vertragen soll. Nun habe ich 1000mA im Reich der Mitte bestellt - mal sehen.
Die Kühlkörper passen saugend in die Rohre. Als befestigung habe ich an allen Vertiefungen dünnen Spritschlauch eingeklemmt. Die Linse wird direkt in den Schlauch verschraubt und hält bombenfest. Die Bilder stammen vom LED-wechsel, also nicht wundern, dass schon alles fertig ist.
...und Ab ins Rohr.
...später dann noch verlötet.
So, nun wurde alles verheiratet. Das war eine schöne Feier und der für mich schönste Moment wärend der Bauphase.
(Da zu dieser Zeit immer noch nicht alle Halter geliefert wurden, musste ich meinen Atom 500 schlachten, damit ich wenigstens 4 Motoren verbauen konnte. So sah das eine ganze Zeit lang aus und ich hatte endlich Zeit micht um die Firmware zu kümmern.
...und von oben.
Über die Montage der Motorern habe ich auch viel gelesen und mich für eine Vibrationsentkopplung entschieden. Dazu habe ich die Gummis bestellt und die 32 inneren Hülsen angefertigt. Verbaut sieht es dann so aus:
Als Resultat würde ich sagen - es bringt ein bischen, aber die eigentliche Entkopplung bringen die Gelpads.
Genau in diesem Zustand bin ich die ersten male im Keller abgehoben
Als Firmware habe ich die MultiWii genommen und die Mixer entsprechend angepasst. Die 4 Motörchen hatten schon zu kämpfen. Schubmessungen habe ich mit 1250g-1300g pro Motor gemessen - sollte also genügen.Da immer noch 4 Halter plus der von meinem Atom gefehlt haben, könnte ich mich mit dem Gimbal bzw. dessen Befestigung befassen. Zum Glück und mit wenigen Änderungen könnte ich die Halterung so verdrehen und invertieren, dass ich sie cutworx-like (langgestreckt) zusammen bauen konnte. Das erkennt man später auf den Bildern. Normalerweise hängt ja das Gimbal unter einem Kopter, also die Aufhängung direkt über dem Schwerpunkt - hier leider nicht.
Also mal wieder eine Aufnahme gedremelt welche ich mit Gelpads befestigt habe. Man sieht sie hinten auf dem Frame liegen.
Hier mal ein paar Bilder von verschiedenen Positionen:
Die Ergebnisse waren so schon sehr gut, jedoch werden die vorderen Pads auf zug belastet was ich später noch geänder habe.
Bilder folgen.
Und eines schönen Tages klingelt es an der Tür - ein Paket aus Holland mit den letzten 5 Haltern. Puh!!!!!
Jetzt konnte endlich mal "richtig" geflogen werden. Zwar noch ohne Landegestell und Akkuhalter aber sonst ok.
UPDATE
16.10.2012 Teil 3
Hier die ersten Videos im Garten:
http://www.youtube.com/watch?v=zmTSsr06nN8
...und Onboard:
http://www.youtube.com/watch?v=75BCM6xjmvc&feature=channel&list=UL
Die Gelpads wollte ich nicht auf Dauer auf zug belasten, daher die erste Erweiterung:
Das Landegestell besteht aus einem Aluhalter mit jeweils 2 CFK Streben außen. Am Ende ist das Rohr mit einer dünnen Edelstahl-Schelle befestigt.
Das Rohr wurde noch gegen ein CFK getauscht:
Jetzt musste noch ein bischen mehr Dampf her. Ich habe mich für Torxpower 2814-11 mit 700kV entschieden ca. 350W. Als Propeller habe ich CFK 12x3.8 bestellt. Mit den 12x3.8 bringt das 2,3kg Schub - und auf meinem Prüfstand einen großen Respekt.
So, das war erstmal hier nur noch zwei Videos. Weitere Infos füge ich zukünftig hinten an.
http://www.youtube.com/watch?v=MbMdfdP3QK0&feature=channel&list=UL
http://www.youtube.com/watch?v=XIFM-Iead_4&feature=channel&list=UL
Grüße,
Olli
Zuletzt bearbeitet:

