Softwarefehler oder Hardwarefehler wie ist das zu erklären?
Habe mich gestern Abend mal wieder mit einem Quadkopter der mit dem AQ M4 bestückt ist zum Testflug auf die Wiese gewagt.
Der Kopter ist schon etwas speziell (sehr leicht Abfluggewicht 1kg mit 16" großen Rotoren)
Bin gestern Abend also auf die Wiese habe alles vorbereitet den Kompass kalibriert DIMU tariert und bin im GPS Mode (Position Hold) gestartet und in ca. 2m Höhe geschwebt. Kopter flog recht ruhig und unauffällig. OK dachte ich mir, dann teste ich gleich mal wie hoch der Energiebedarf ist und wollte eine halbe Stunde weiterschweben.
Nach guten 8 1/2 Minuten bewegte sich der Kopter plötzlich ohne erkennbaren Grund in schwingenden Bewegungen sehr rasch nach oben. Da die Reaktion des Kopters für mich völlig unverhofft war, habe ich sofort versucht das Gas ruter zu nehmen und dann auch die Motoren zu stoppen. Der Kopter ist dann etwas unsanft gelandet, hat aber trotz der sehr filigranen Bauweise keinen Schaden genommen.
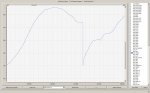
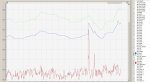
Nun habe ich mir heute das Log-File (siehe Anlage) angesehen und dabei ist mir aufgefallen, dass zwischen 158.158 und 158.159 die Werte für GPS_HEIGHT und ADC_PRESSURE1 sich schlagartig um -2,6m bzw. +0,22hPa verändert haben. Der Kopter hat somit scheinbar richtig reagiert indem er die Motoren stark beschleunigt hat. Das und meine wohl nicht ganz richtige Reaktion sind im log gut zu erkennen.
Die Werte für GPS_HACC und GPS_VACC lagen durchgängig auf einem guten Niveau so um die 0,7
Ich denke die anderen Werte liegen bis zum besagten Ereignis auch in einem vernünftigem Bereich.
Meine Frage nun, wo kommt die sprunghafte Veränderung der Werte für GPS_HEIGHT und ADC_PRESSURE1 her? Und warum reagiert die Software auf den vermeintlichen Fehler der Sensoren so heftig?
In der Anlage das LOG-File und Parameterliste. Habe die Situation auch auf Video, denke aber aus dem LOG kann mann alles schon gut erkennen.
VG Reiner
Anhang anzeigen PARAMS.txt
PS: LOG ist zu groß als direkte Anlage daher hier in der Dropbox: https://www.dropbox.com/s/41qcrj2ulcp5wpn/037-AQL.LOG?dl=0
Habe mich gestern Abend mal wieder mit einem Quadkopter der mit dem AQ M4 bestückt ist zum Testflug auf die Wiese gewagt.
Der Kopter ist schon etwas speziell (sehr leicht Abfluggewicht 1kg mit 16" großen Rotoren)
Bin gestern Abend also auf die Wiese habe alles vorbereitet den Kompass kalibriert DIMU tariert und bin im GPS Mode (Position Hold) gestartet und in ca. 2m Höhe geschwebt. Kopter flog recht ruhig und unauffällig. OK dachte ich mir, dann teste ich gleich mal wie hoch der Energiebedarf ist und wollte eine halbe Stunde weiterschweben.
Nach guten 8 1/2 Minuten bewegte sich der Kopter plötzlich ohne erkennbaren Grund in schwingenden Bewegungen sehr rasch nach oben. Da die Reaktion des Kopters für mich völlig unverhofft war, habe ich sofort versucht das Gas ruter zu nehmen und dann auch die Motoren zu stoppen. Der Kopter ist dann etwas unsanft gelandet, hat aber trotz der sehr filigranen Bauweise keinen Schaden genommen.
Nun habe ich mir heute das Log-File (siehe Anlage) angesehen und dabei ist mir aufgefallen, dass zwischen 158.158 und 158.159 die Werte für GPS_HEIGHT und ADC_PRESSURE1 sich schlagartig um -2,6m bzw. +0,22hPa verändert haben. Der Kopter hat somit scheinbar richtig reagiert indem er die Motoren stark beschleunigt hat. Das und meine wohl nicht ganz richtige Reaktion sind im log gut zu erkennen.
Die Werte für GPS_HACC und GPS_VACC lagen durchgängig auf einem guten Niveau so um die 0,7
Ich denke die anderen Werte liegen bis zum besagten Ereignis auch in einem vernünftigem Bereich.
Meine Frage nun, wo kommt die sprunghafte Veränderung der Werte für GPS_HEIGHT und ADC_PRESSURE1 her? Und warum reagiert die Software auf den vermeintlichen Fehler der Sensoren so heftig?
In der Anlage das LOG-File und Parameterliste. Habe die Situation auch auf Video, denke aber aus dem LOG kann mann alles schon gut erkennen.
VG Reiner
Anhang anzeigen PARAMS.txt
PS: LOG ist zu groß als direkte Anlage daher hier in der Dropbox: https://www.dropbox.com/s/41qcrj2ulcp5wpn/037-AQL.LOG?dl=0
Zuletzt bearbeitet: