Hi,
ich wollte euch mal den Bau meines neuen Kopters vorstellen. (Und habe auch noch ein paar fragen...siehe unten)
Vor einiger Zeit bin ich hier im Forum auf den Tarot T960 Frame aufmerksam geworden...
Ich konnte es natürlich nicht lassen und habe mir einen bestellt.
Geplant war eigentlich ihn als HEXA aufzubauen aber letztlich habe ich mich für einen DODECA entschieden
Aufgebaut habe ich ihn mit folgenden Teilen:
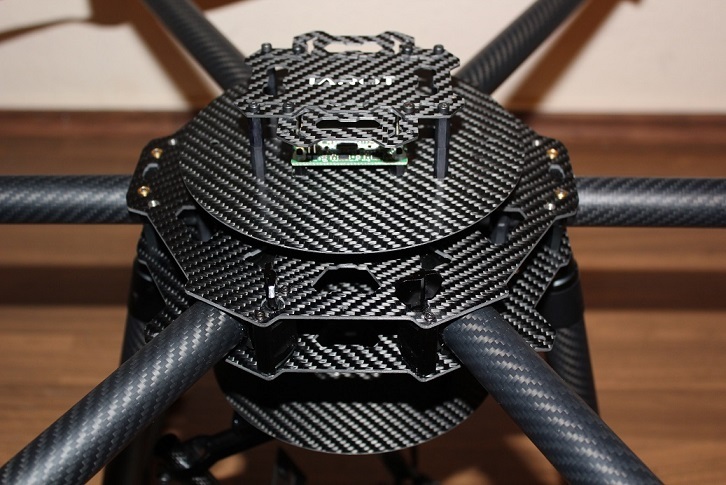
Frame: Tarot T960
Landegestell: Tarot T960 six-axis folding tripod
Motormounts: 12 x Schellen und 12 x CFK Motorträger für 25mm Rohr
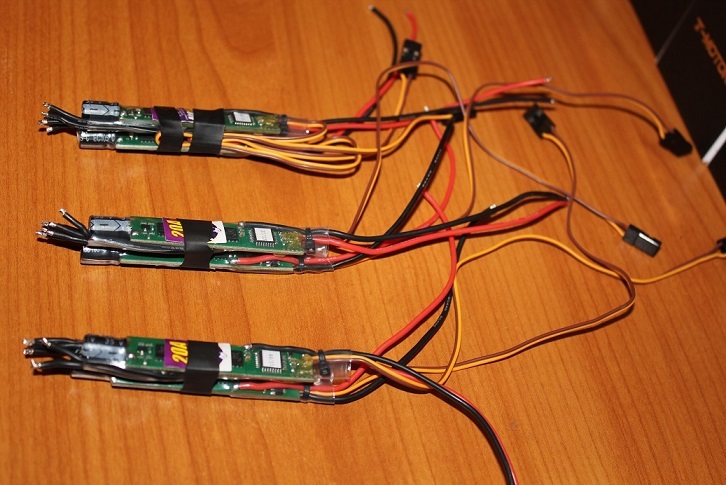
ESC: 12 x Afro Slim 20A
Motoren: 12 x T-Motor NM3508-20 580KV
Propeller: 12 x 16x5.5 Carbon Props
Gimbal: Brushless Gimbal für DSLR-Cams
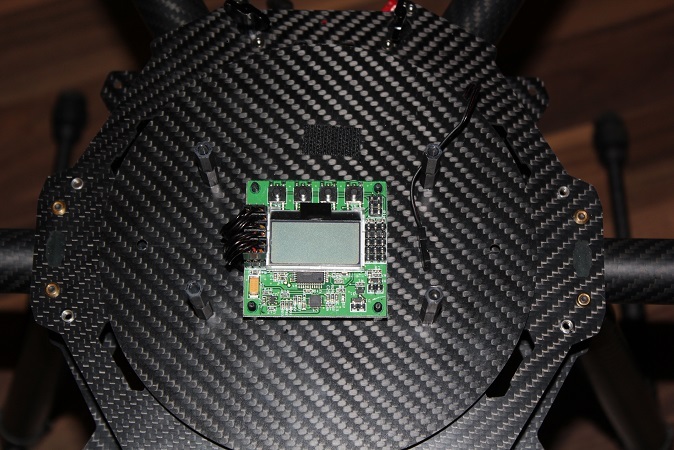
FC: zum testen erstmal ein KK2.1 Board später dann Naza oder Wookong





Ich bin kein großer Schreiber daher habe ich einfach mal viele Bilder gemacht.
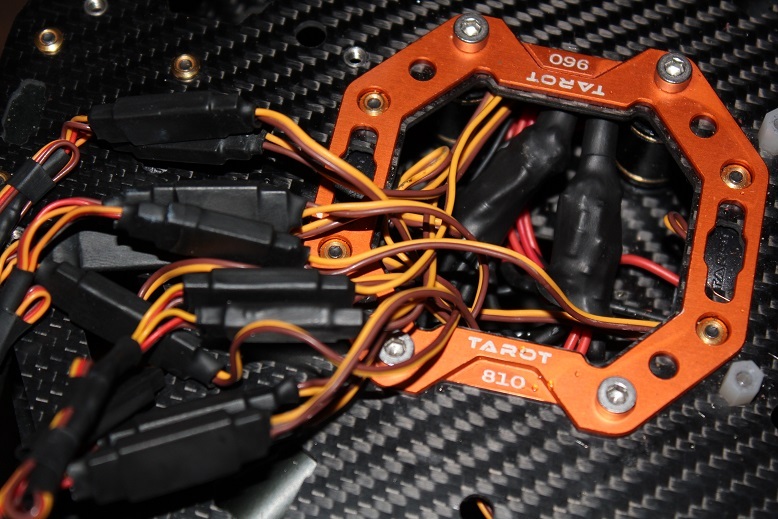
Zu sagen gibt es eigentlich nur das die "Afro Slim ESC" in den Auslegern verbaut sind (je 2 pro Auslegerrohr) und das ich kein Stromverteilerboard und keine Stecker benutze (Ich löte immer alles direkt zusammen).
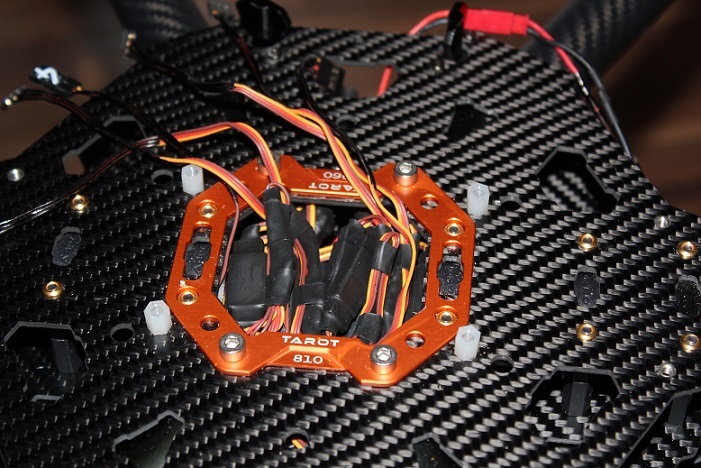
Zusätzlich zum Originalrahmen habe ich noch 2 x 0,8mm CFK-Platten als obere Abdeckung und als Akkuhalterung verbaut.







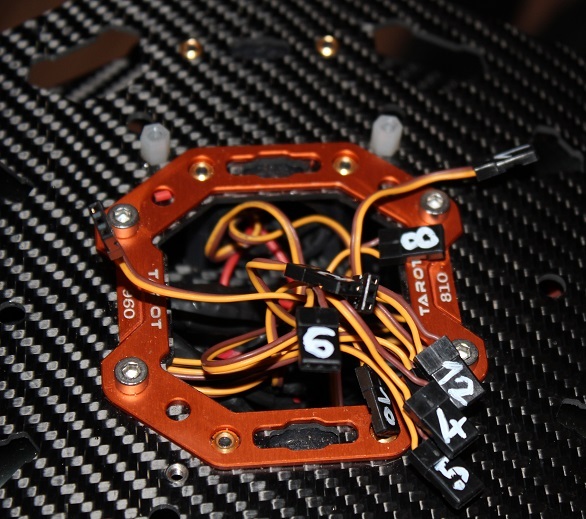
Alles verkabelt






Fertig




Fertig aufgebaut wiegt das gute Stück genau 2993 Gramm.
Mit Gimbal und DSLR 4330 Gramm.

Die ersten Tests stehen noch aus!
Ich bin mir auch noch gar nicht sicher welche Konfiguration ich am besten in der FC auswähle...
Habe gelesen das andere ihre Dodecas als Y-Hexa fliegen !?
Und bei mir habe ich jeweils die 2 ESC-Servokabel eines Auslegers verbunden (da ja die FC keine 12 Eingänge hat). Funktioniert das so überhaupt? xD Denn ich habe hier im Forum gelesen das andere bei Dodecas je 2 ESC von nebeneinander liegenden Auslegern verbunden haben...aber da verstehe ich den Sinn nicht ganz
Ich kann ihn doch einfach als Flat-Hexa konfigurieren und die untere Ebene einfach entgegengesetzt laufen lassen ODER ?
Ja ich weiß...ich hätte vor dem bauen fragen sollen Aber die Servokabel sind ja schnell getauscht.
ich wollte euch mal den Bau meines neuen Kopters vorstellen. (Und habe auch noch ein paar fragen...siehe unten)
Vor einiger Zeit bin ich hier im Forum auf den Tarot T960 Frame aufmerksam geworden...
Ich konnte es natürlich nicht lassen und habe mir einen bestellt.
Geplant war eigentlich ihn als HEXA aufzubauen aber letztlich habe ich mich für einen DODECA entschieden
Aufgebaut habe ich ihn mit folgenden Teilen:
Frame: Tarot T960
Landegestell: Tarot T960 six-axis folding tripod
Motormounts: 12 x Schellen und 12 x CFK Motorträger für 25mm Rohr
ESC: 12 x Afro Slim 20A
Motoren: 12 x T-Motor NM3508-20 580KV
Propeller: 12 x 16x5.5 Carbon Props
Gimbal: Brushless Gimbal für DSLR-Cams
FC: zum testen erstmal ein KK2.1 Board später dann Naza oder Wookong
Ich bin kein großer Schreiber daher habe ich einfach mal viele Bilder gemacht.
Zu sagen gibt es eigentlich nur das die "Afro Slim ESC" in den Auslegern verbaut sind (je 2 pro Auslegerrohr) und das ich kein Stromverteilerboard und keine Stecker benutze (Ich löte immer alles direkt zusammen).
Zusätzlich zum Originalrahmen habe ich noch 2 x 0,8mm CFK-Platten als obere Abdeckung und als Akkuhalterung verbaut.
Alles verkabelt
Fertig
Fertig aufgebaut wiegt das gute Stück genau 2993 Gramm.
Mit Gimbal und DSLR 4330 Gramm.
Die ersten Tests stehen noch aus!
Ich bin mir auch noch gar nicht sicher welche Konfiguration ich am besten in der FC auswähle...
Habe gelesen das andere ihre Dodecas als Y-Hexa fliegen !?
Und bei mir habe ich jeweils die 2 ESC-Servokabel eines Auslegers verbunden (da ja die FC keine 12 Eingänge hat). Funktioniert das so überhaupt?
xD Denn ich habe hier im Forum gelesen das andere bei Dodecas je 2 ESC von nebeneinander liegenden Auslegern verbunden haben...aber da verstehe ich den Sinn nicht ganzIch kann ihn doch einfach als Flat-Hexa konfigurieren und die untere Ebene einfach entgegengesetzt laufen lassen ODER ?
Ja ich weiß...ich hätte vor dem bauen fragen sollen
Aber die Servokabel sind ja schnell getauscht.
Zuletzt bearbeitet: