Super danke! Das war die bis jetzt hilfreichsten Antworten
Nur falls ich jetzt Blödsinn erzähl, weißt du warum bin hier noch mehr ein Schwätzer als erfahrener Tuner 🙈
Auf dem Status bin ich mehr oder weniger auch. Das ist mein erster Versuch von PID Tuning.
Aber was mir auffällt, bisher sagt wirklich immer jeder dass man immer nur einen Slider für einen kleinen Wert verstellen und dann wieder in die Blackbox guggen soll. Dann weißt du immer was ein komisches Verhalten auslöst...
genau so hab ich es auch gemacht, genau nach Anleitung. So bin ich schrittweise zu der (für mich gesehen schönen) Kurve gekommen.
Der Bardwell hat zwei verdammt gutes Videos gemacht, das basiert auf den Rosser Empfehlungen, weiß nicht ob du das kennst:
Ja kenne ich, danke! Gefühlt kenne ich alle Video Tutorials zu dem Thema!
")
Gerade deshalb finde ich es auch spannend, dass die Leute teilweise recht unterschiedlich an die Sache rangehen und sich das auch mit den Versionen in Betaflight geändert hat.
..., schrecke aber innerlich noch bissl vor dem Aufwand zurück..... Vielleicht wird das auch mal ein Sonntag auf ner Wiese mit Notebook 🤣
Ja, der Aufwand ist schon nicht ohne, wenn man die ganzen Werte einzeln testfliegt und dann auswertet. Ich hatte den Vorteil, dass ich das direkt im Garten machen konnte und mit der SpeedyBee App geht das umstellen wirklich einfach und schnell, weshalb man die einzelnen Werte von jedem Durchgang recht schnell durch ist.
Das wo ich gedanklich am meisten hänge ist, dass immer noch nicht ganz verstehe was die einzelnen Werte wirklich machen in der Praxis. Grundsätzlich ist mir die Analogie zu einer Autofederung schon klar und in der Theory weiß ich was die P, I und D machen, aber ich könnte jetzt nicht wirklich sagen an welcher Schraube ich drehen muss um welches Verhalten zu verbessern (ich weiß, dass klingt jetzt etwas wiedersprüchlich), wenn das Ding nicht wirklich deutlich in eine Richtung tendiert.
Beispiel: Mit den Standardeinstellungen gibts keine merkliches nachwippen, es vibriert/wobbelt auch nichts auffällig. Es ist also für mich nicht wirklich ein konkretes Problem da welches ich konkret beschreiben könnte und beheben will. Könnte das so fliegen wie es ist und mich damit abfinden. Es ist einfach so, dass die 3" im Vergleich dazu (mehr Vergleich hab ich ja nicht) sich etwas agiler, knackier fliegen lässt und das nicht wegen dem geringeren Gewicht. Sie rastet noch etwas schöner ein nach einer Rolle oder Flip und fühlt sich etwas direkter an. Besser kann ich es nicht beschreiben. Fühlt sich so an wenn du einen Rennwagen nur bis 5000rpm ausfährst, geht und gibt keine negativen Anzeichen, aber das Gefühl ist da, dass da noch mehr gehen muss. Ich hoffe ihr versteht was ich meine!? Einfach MM rauf hat da nicht wirklich was gebracht und bei 1,2 haben schon die Motoren geklingelt. In Verbindung mit den anderen Schiebern bin ich nach dem Tuning dann bei Master 1,3 gelandet ohne, dass sich die motoren gemeldet haben, aber mit dem beschriebenen sonst schlechteren Flugverhalten.
Sowas kann halt schon and filtern + aggressive PIDs liegen. Wenn viel noise in den loop reinkommt, wird der halt von den PIDs mit verarbeitet. Besonders D-Term ist sehr noise anfällig.
PIDs stehen halt hinter den filtern im loop.
Dh du würdest die Filter mal wieder aufdrehen und bei dem agessiveren Tuning bleiben und schauen was bei einem Testflug passiert?
Das kann ich mal machen, dann können wir zu mindestens die Filter als Ursache ausschließen, wenn es nichts bringt.
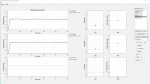
Wenn ich tune, mache ich immer zuerst die Filter und schaue mir nach dem testflug in der Pidtoolbox den noise an. Wenn da im zuviel noise im gefilterten Gyro ist, dann muss man die filter hochdrehen. (Spektrum analyser, Freq vs throttle, parula heat map)
Das ist quasi die basis fürs Pidtuning.
Das hab ich gemacht und da waren selbst ohne Filter die Heat Maps "schöner" als bei den meisten die ich im Internet gesehen habe mit den Filtern aktiv. Ich habe da glaube ich noch einen Screenshot auf dem anderen Rechner, kann ich nachher hochladen. Vielleicht habe ich ja was übersehen.