
Mein letzter Versuch ist zwar nicht komplett gescheitert, aber meine Erwartungen wurden leider nicht erfüllt. Also; auf ein Neues!
Der perfekte Mobius-Kopter muss...
1. Günstig & und doch so weit wie möglich ausfallssicher sein
2. Gute Videoaufnahmen ermöglichen (Kein Jello, keine Propeller im Bild)
3. Akzeptable Flugzeiten aufweisen
4. Leicht reparierbar sein
Und der Plan?
Es soll ein normaler X-Quadrocopter werden. Dies ist aus meiner Sicht die einzige Bauweise, die meine Erwartungen erfüllt, denn…
…H-Kopter sind weder gewichseffizient noch verwindungssteif.
…Spider-Kopter sind aufwändiger zu reparieren & planen als X-Kopter. Dazu kommt, dass die hinteren Arme deutlich länger als die Vorderen sind, was die Gefahr eines Aufschwingens(/Resonanz) erhöht!
Flugsteuerung wird ein APM2.6 von Goodluckbuy. Dieses soll mit return to home eine akzeptable Ausfallssicherheit bieten. Der Kopter selbst wird aus 10mm Alu-Vierkantprofilen gebaut. 1 mm starke Carbonplatten müssen als Centerplates reichen.
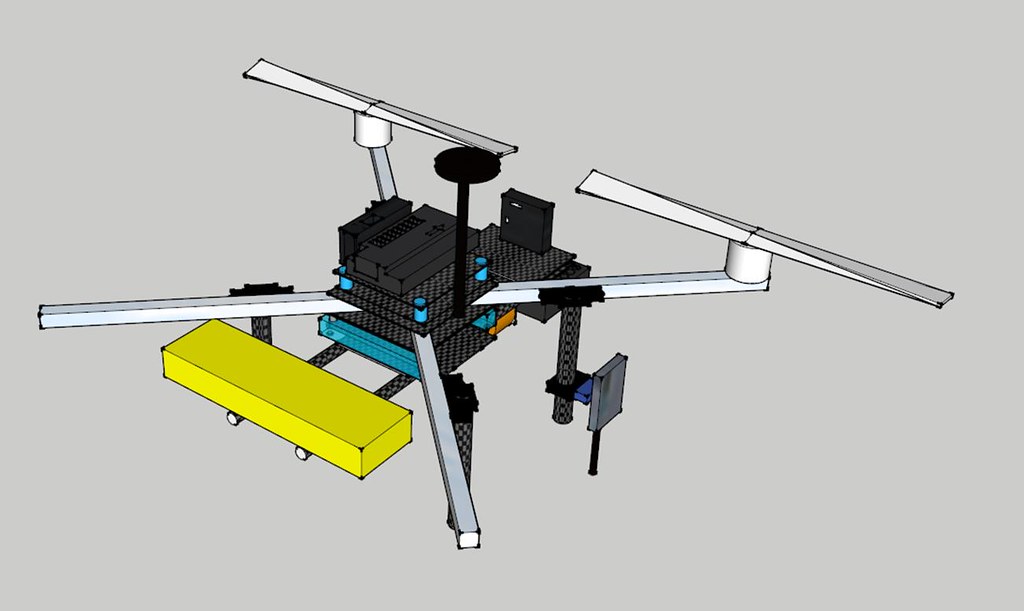
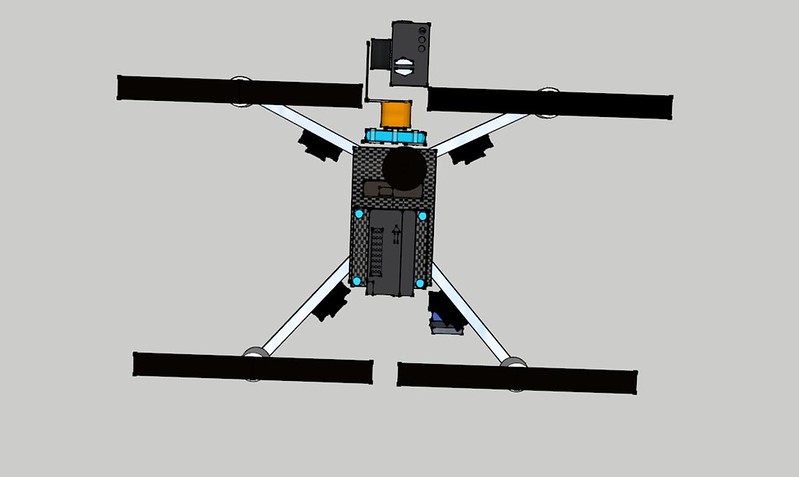
In Google Sketchup habe ich versucht, den Kopter zusammenzubauen…Man möge mir verzeihen, ich habe vorher noch nie mit einem solchen Programm gearbeitet!
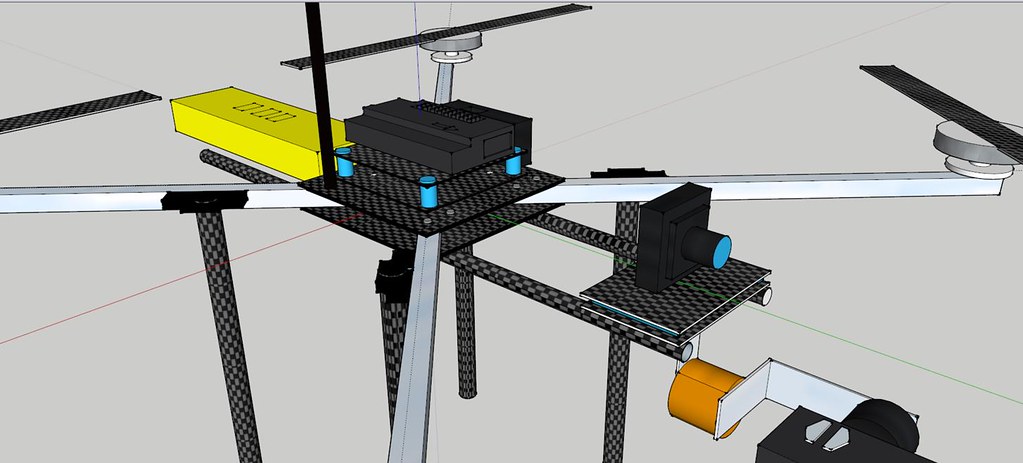
So soll der Kopter ungefähr aussehen:

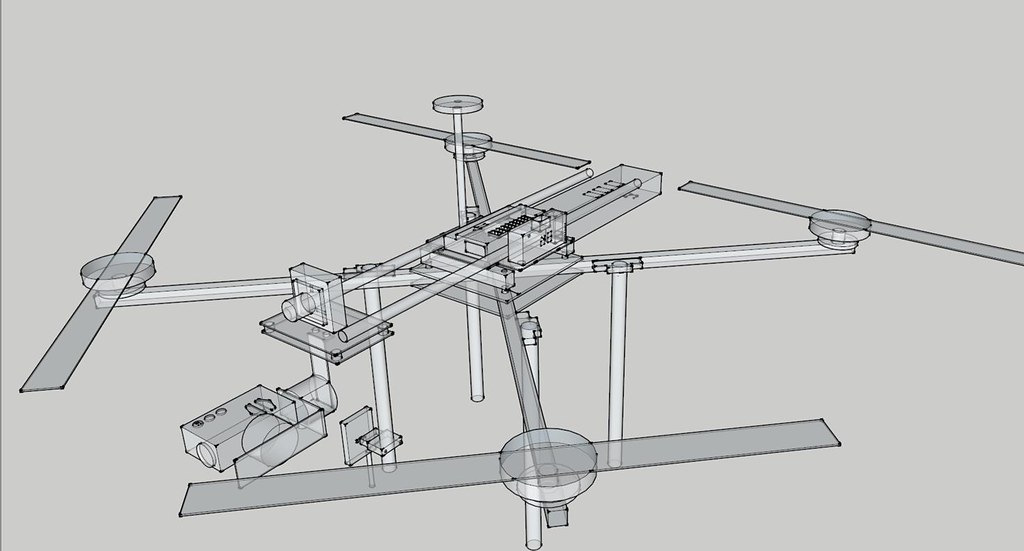
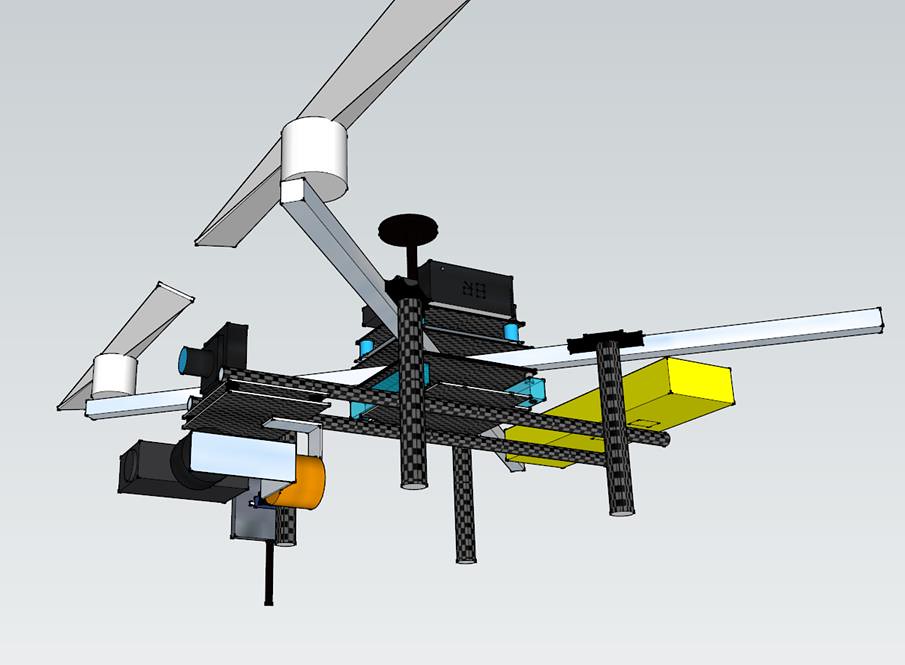
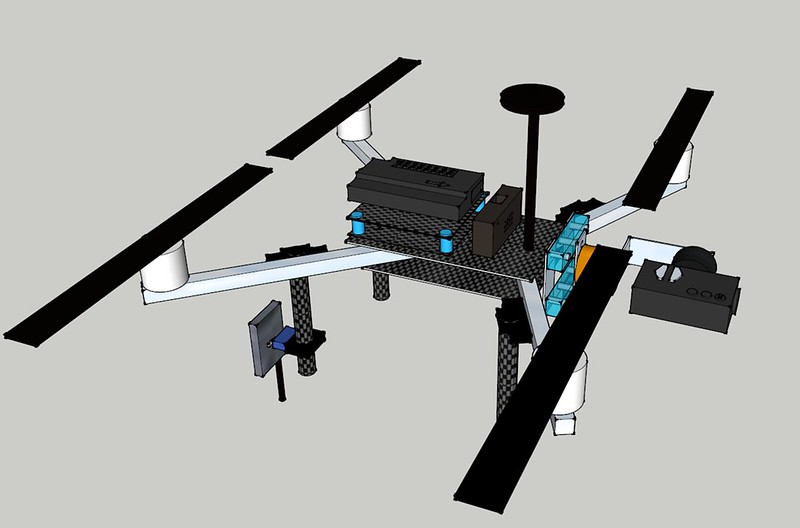
… und weil es so cool ausschaut, hier eine monochrom-röntgen Ansicht
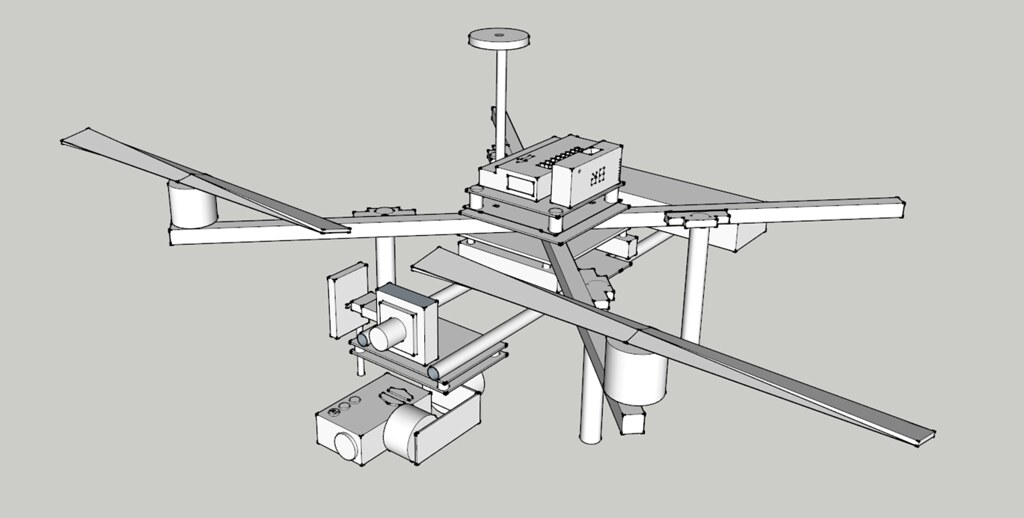
Ursprünglich wollte ich keine grosse, gedämpfte Ebene für Akku, Gimbal, APM usw. machen, sondern alle Komponenten separat dämpfen. Das wäre aber gewichtsmässig schlecht, zudem wäre die träge Masse (=Akku) geringer, was sich negativ auf die Dämpfungseigenschaften auswirken würde. Hier also die ursprüngliche Version:
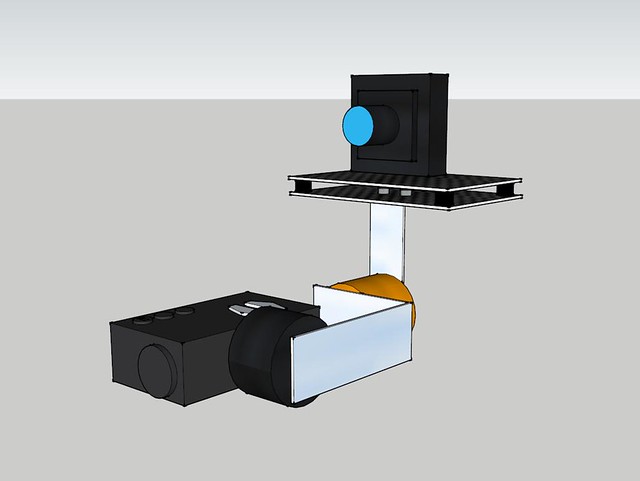
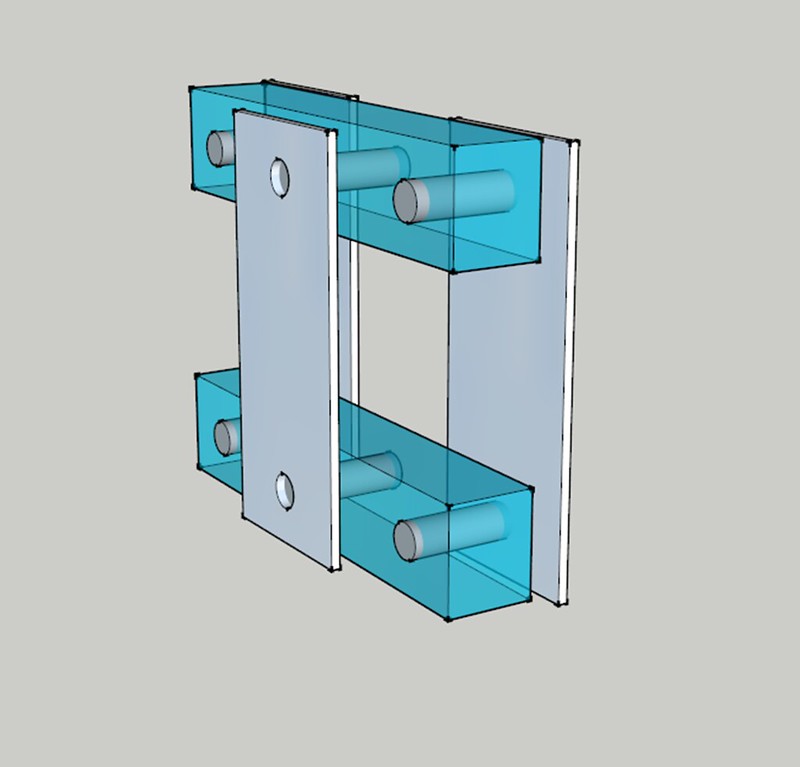
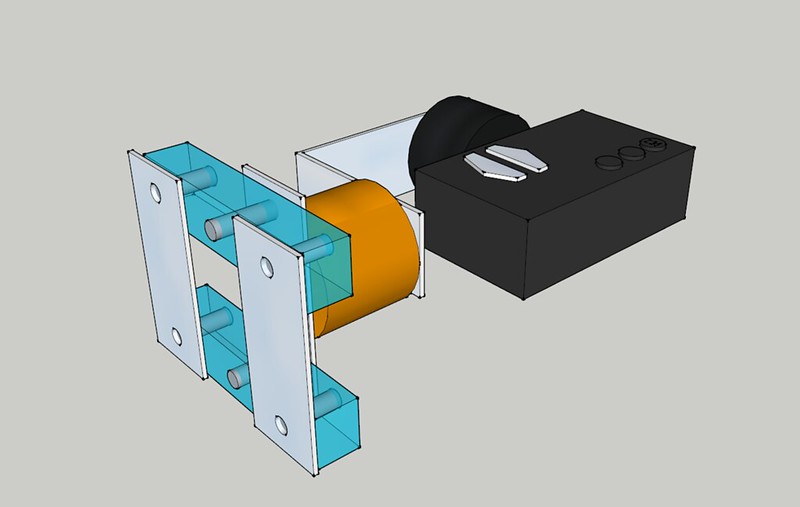
Die neue Idee zur Schwinungsdämpfung im Grossformat:
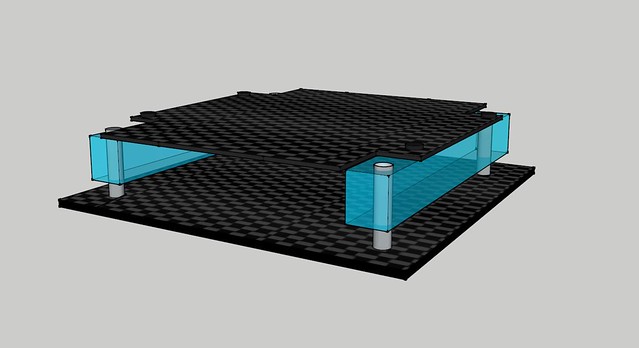
Das blaue Zeugs soll Baumarktsilikon darstellen. Ich denke, das Funktionsprinzip ist klar. Das Teil wird, wie im ersten Bild zu sehen, direkt auf der Centerplate montiert.
Das Landegestellt wird aus vier 12mm Carbonrohren von ungefähr 23 cm Länge gebaut welche mit „T-Style tube clamps“ an den Auslegern befestigt werden. Diese sind zudem eine gewollte Sollbruchstelle im Falle eines Absturzes (pro Stück weniger als 1$, zur Reparatur müssen lediglich drei Schrauben gelöst werden).
Wahrscheinlich werde ich den Sender an einem kleinen Servo befestigen, wodurch sich die Antenne nach unten richten lässt.
Die Mobius wird an einem kleinen Brushlessgimbal befestigt. Dieses wird zusätzlich mit vier kleinen 50g-Antivibrationsbällen gedämpft.
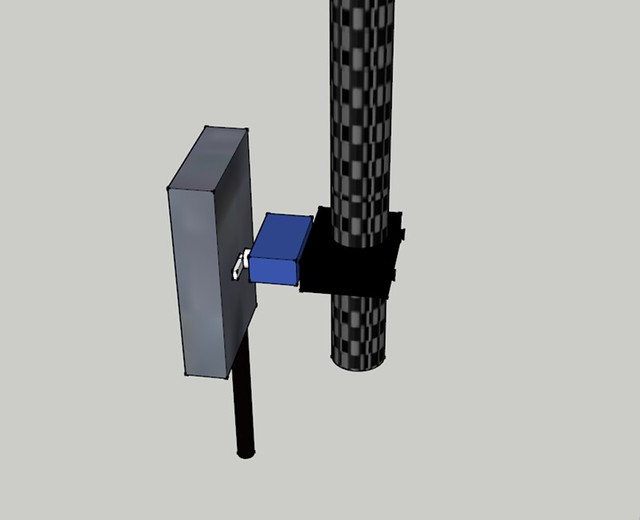
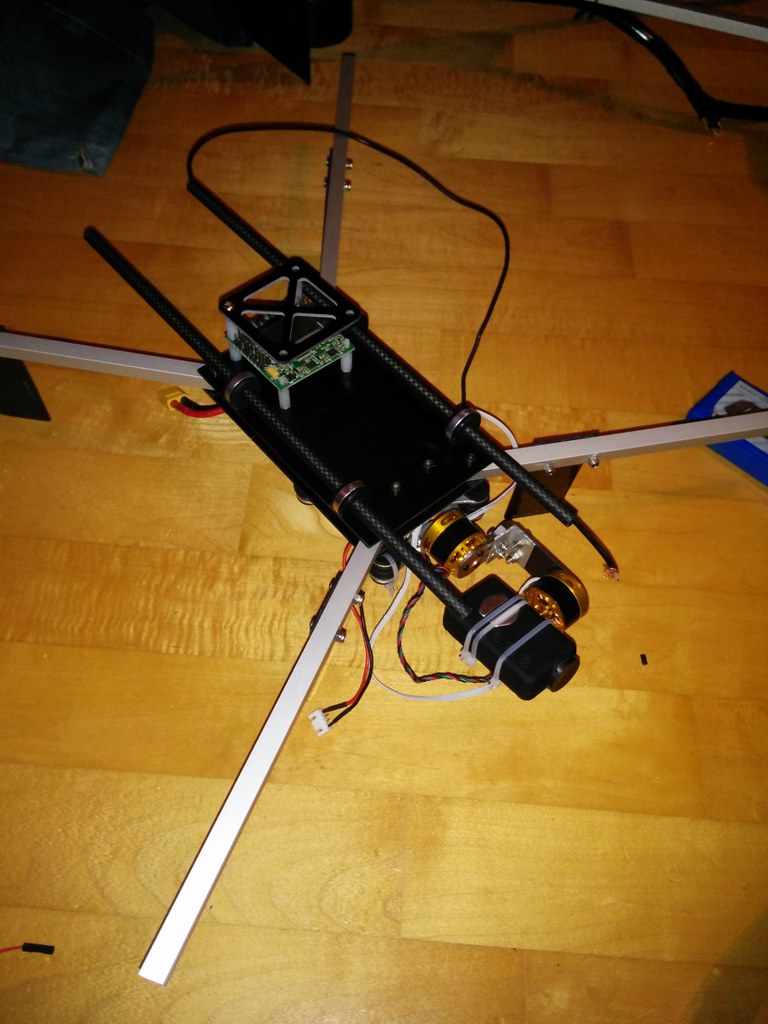
Gestern ist das erste Packet mit einigen Teilen von Himodel angekommen. So sieht ein Landegestell- Arm in echt aus:

Vier dieser Carbonrohre, inklusive Kappe und Befestigung, wiegen 75 Gramm.
Zum Abschluss die wichtigsten technischen Daten:
- 530 KV Turnigy Motoren
- 13'', evtl. auch 14'' Carbonpropeller
- F-30a Regler mit Simonk
- 4000 & 5000mAh 3s Lipos
nice to know: Wenn der Kopter etwa 1.7Kg schwer ist und ich einen spezifischen Schub von 10g/Watt erreiche, ergibt das eine Flugzeit von 19 Minuten bei vollständig geleertem 5000mAh Akku.
Mit freundlichen Grüssen,
Christian
Der perfekte Mobius-Kopter muss...
1. Günstig & und doch so weit wie möglich ausfallssicher sein
2. Gute Videoaufnahmen ermöglichen (Kein Jello, keine Propeller im Bild)
3. Akzeptable Flugzeiten aufweisen
4. Leicht reparierbar sein
Und der Plan?
Es soll ein normaler X-Quadrocopter werden. Dies ist aus meiner Sicht die einzige Bauweise, die meine Erwartungen erfüllt, denn…
…H-Kopter sind weder gewichseffizient noch verwindungssteif.
…Spider-Kopter sind aufwändiger zu reparieren & planen als X-Kopter. Dazu kommt, dass die hinteren Arme deutlich länger als die Vorderen sind, was die Gefahr eines Aufschwingens(/Resonanz) erhöht!
Flugsteuerung wird ein APM2.6 von Goodluckbuy. Dieses soll mit return to home eine akzeptable Ausfallssicherheit bieten. Der Kopter selbst wird aus 10mm Alu-Vierkantprofilen gebaut. 1 mm starke Carbonplatten müssen als Centerplates reichen.
In Google Sketchup habe ich versucht, den Kopter zusammenzubauen…Man möge mir verzeihen, ich habe vorher noch nie mit einem solchen Programm gearbeitet!
So soll der Kopter ungefähr aussehen:
… und weil es so cool ausschaut, hier eine monochrom-röntgen Ansicht
Ursprünglich wollte ich keine grosse, gedämpfte Ebene für Akku, Gimbal, APM usw. machen, sondern alle Komponenten separat dämpfen. Das wäre aber gewichtsmässig schlecht, zudem wäre die träge Masse (=Akku) geringer, was sich negativ auf die Dämpfungseigenschaften auswirken würde. Hier also die ursprüngliche Version:
Die neue Idee zur Schwinungsdämpfung im Grossformat:
Das blaue Zeugs soll Baumarktsilikon darstellen. Ich denke, das Funktionsprinzip ist klar. Das Teil wird, wie im ersten Bild zu sehen, direkt auf der Centerplate montiert.
Das Landegestellt wird aus vier 12mm Carbonrohren von ungefähr 23 cm Länge gebaut welche mit „T-Style tube clamps“ an den Auslegern befestigt werden. Diese sind zudem eine gewollte Sollbruchstelle im Falle eines Absturzes (pro Stück weniger als 1$, zur Reparatur müssen lediglich drei Schrauben gelöst werden).
Wahrscheinlich werde ich den Sender an einem kleinen Servo befestigen, wodurch sich die Antenne nach unten richten lässt.
Die Mobius wird an einem kleinen Brushlessgimbal befestigt. Dieses wird zusätzlich mit vier kleinen 50g-Antivibrationsbällen gedämpft.
Gestern ist das erste Packet mit einigen Teilen von Himodel angekommen. So sieht ein Landegestell- Arm in echt aus:
Vier dieser Carbonrohre, inklusive Kappe und Befestigung, wiegen 75 Gramm.
Zum Abschluss die wichtigsten technischen Daten:
- 530 KV Turnigy Motoren
- 13'', evtl. auch 14'' Carbonpropeller
- F-30a Regler mit Simonk
- 4000 & 5000mAh 3s Lipos
nice to know: Wenn der Kopter etwa 1.7Kg schwer ist und ich einen spezifischen Schub von 10g/Watt erreiche, ergibt das eine Flugzeit von 19 Minuten bei vollständig geleertem 5000mAh Akku.
Mit freundlichen Grüssen,
Christian

")




