
Hallo,
ich hatte gestern einen recht mysteriösen Absturz mit meinem KlappQuad Quadrocopter:
Weil der Copter in der Nähe eines Waldstückchens runterging dachte ich zuerst, ich hätte irgendwie einen Baum übersehen. Als ich später dann den Video angeschaut habe, habe ich aber gesehen, dass ich (wie geplant) viel höher als die Bäume geflogen war und auch weit und breit keine Äste zu sehen waren.
Der Copter macht im Video einfach kurz ein seltsames Geräusch und kachelt dann ab. Im Video sieht man dann sogar noch Teile eines Propellers wegfliegen.
http://youtu.be/Ct7aSq9Hr3Y
Beim Einschlag sind die beiden hinteren Arme des Copters gebrochen. Alle vier Propeller waren noch fest auf den Achsen (es hatte sich also nicht einfach eine der Muttern/Propeller während dem Flug gelöst).
Lediglich der hintere rechte Propeller ist schwer beschädigt, ich vermute mal, die wegfliegenden Teile waren von da:

Ansonsten hat es der Copter (und die Technik) aber anscheinend unbeschadet überlebt.
Ursachenforschung
Beim vorderen, rechten Propeller sind ebenfalls die Propellerspitzen weg (es fehlen aber nur ca. 2mm an jedem Ende). Die beiden linken Propeller sind unversehrt. Eine Erklärung für den Schaden nur auf der rechten Seite wäre ein Einschlag auf dieser Seite mit laufenden Motoren. Das würde aber weder den Absturz selbst noch die in der Luft herumfliegenden Propellerteile erklären. Wahrscheinlicher ist wohl, dass sich in der Luft (vielleicht wegen einer Windböe, denn der Copter flog ja ansonsten im Moment des Absturzes relativ stabil gerade aus) der rechte vordere, klappbare Arm aus seiner (Klemm-)Arretierung gelöst hat und so weit nach hinten geklappt ist, dass sich die beiden Propeller berührt haben. Irgendwie immer noch seltsam, dass dann nur der hintere Propeller so schwer beschädigt ist und der vordere dabei kaum was abbekommen hat, aber vielleicht ist das ja bei Propellern wie bei hartgekochten Eiern, die man mit der Spitze zusammenstößt. Da geht auch immer nur eins kaputt...
Jedenfalls scheint mir das die plausibelste Erklärung. Falls jemand eine bessere Idee hat, immer her damit")
Ich werde mir jedenfalls mal überlegen, wie ich die Arretierung der vorderen Arme verbessern kann (ohne gleich zusätzliche Schrauben verwenden zu müssen).
Übrigens war Einschlagstelle ca. 400m von meinem Standort entfernt hinter einer Kuppe am Waldrand. Ich wusste somit zwar grob die Richtung, hatte ansonsten aber nicht gesehen, wo genau der Copter runterging.
Zum Glück handelte es sich bei dem Flug aber um den ersten Testflug mit einer von mir selbstgebauten Telemetrie-Anbindung (Naza Lite über FrSky X8R an Taranis). Dieser Teil des Flugs war zum Glück ein voller Erfolg. Neben Batteriespannung, Heading, Geschwindigkeit und Höhe zeigt mir die Taranis damit auch die aktuellen GPS-Koordinaten des Copters an (und zeichnet sie ggf. auch auf der SD Karte im Sekundentakt auf). Bricht die Verbindung ab, bleibt die letzte bekannte GPS-Position auf dem Display stehen.
Ich hatte zwar Anfangs noch Schwierigkeiten, die Koordinaten in der Karten-App auf meinem iPhone zu suchen, habe dann aber herausgefunden, dass man sie nur ein wenig anders formatieren muss. Die Taranis zeigt die Koordinaten im Format 48°N 28' 58.800" 7° E 58'37.740" an. Das iPhone (Karten App und Google Earth) verstehen die Koordinaten aber nur so 48°28'58.80"N 7°58'37.74"E (also einfach das N und E nach hinten).
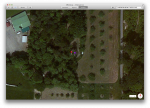
Hier die Absturzstelle wie von der Taranis gemeldet (linke, rote Nadel). Die rechte, lila Nadel habe ich auf dem iPhone gesetzt, als ich den Copter gefunden hatte (ich war vorher noch 2-3m Richtung offenes Feld gelaufen). Wie man sieht, war die Ortung ziemlich exakt.
Über meinen Naza-SmartPort-Adapter werde ich in Kürze noch genauer berichten. Der Prototyp funktioniert jedenfalls schon mal ziemlich gut! Ich bin jetzt erst mal dabei, das Teil noch zu miniaturisieren.
Bisher ist der Adapter noch 18x33mm groß (siehe auf dem Bild, neben der X8R) und wird einfach zwischen Naza (v1, v2 oder lite) und den SmartPort am Receiver gesteckt:

Die Konstruktion der verkleinerten Elektronik ist schon fertig (und die Bauteile bestellt), sodass ich voraussichtlich kommende Woche einen neuen Prototypen aufbauen kann, der dann nur noch 10x22mm groß ist.
ich hatte gestern einen recht mysteriösen Absturz mit meinem KlappQuad Quadrocopter:
Weil der Copter in der Nähe eines Waldstückchens runterging dachte ich zuerst, ich hätte irgendwie einen Baum übersehen. Als ich später dann den Video angeschaut habe, habe ich aber gesehen, dass ich (wie geplant) viel höher als die Bäume geflogen war und auch weit und breit keine Äste zu sehen waren.
Der Copter macht im Video einfach kurz ein seltsames Geräusch und kachelt dann ab. Im Video sieht man dann sogar noch Teile eines Propellers wegfliegen.
http://youtu.be/Ct7aSq9Hr3Y
Beim Einschlag sind die beiden hinteren Arme des Copters gebrochen. Alle vier Propeller waren noch fest auf den Achsen (es hatte sich also nicht einfach eine der Muttern/Propeller während dem Flug gelöst).
Lediglich der hintere rechte Propeller ist schwer beschädigt, ich vermute mal, die wegfliegenden Teile waren von da:
Ansonsten hat es der Copter (und die Technik) aber anscheinend unbeschadet überlebt.
Ursachenforschung
Beim vorderen, rechten Propeller sind ebenfalls die Propellerspitzen weg (es fehlen aber nur ca. 2mm an jedem Ende). Die beiden linken Propeller sind unversehrt. Eine Erklärung für den Schaden nur auf der rechten Seite wäre ein Einschlag auf dieser Seite mit laufenden Motoren. Das würde aber weder den Absturz selbst noch die in der Luft herumfliegenden Propellerteile erklären. Wahrscheinlicher ist wohl, dass sich in der Luft (vielleicht wegen einer Windböe, denn der Copter flog ja ansonsten im Moment des Absturzes relativ stabil gerade aus) der rechte vordere, klappbare Arm aus seiner (Klemm-)Arretierung gelöst hat und so weit nach hinten geklappt ist, dass sich die beiden Propeller berührt haben. Irgendwie immer noch seltsam, dass dann nur der hintere Propeller so schwer beschädigt ist und der vordere dabei kaum was abbekommen hat, aber vielleicht ist das ja bei Propellern wie bei hartgekochten Eiern, die man mit der Spitze zusammenstößt. Da geht auch immer nur eins kaputt...
Jedenfalls scheint mir das die plausibelste Erklärung. Falls jemand eine bessere Idee hat, immer her damit
Ich werde mir jedenfalls mal überlegen, wie ich die Arretierung der vorderen Arme verbessern kann (ohne gleich zusätzliche Schrauben verwenden zu müssen).
Übrigens war Einschlagstelle ca. 400m von meinem Standort entfernt hinter einer Kuppe am Waldrand. Ich wusste somit zwar grob die Richtung, hatte ansonsten aber nicht gesehen, wo genau der Copter runterging.
Zum Glück handelte es sich bei dem Flug aber um den ersten Testflug mit einer von mir selbstgebauten Telemetrie-Anbindung (Naza Lite über FrSky X8R an Taranis). Dieser Teil des Flugs war zum Glück ein voller Erfolg. Neben Batteriespannung, Heading, Geschwindigkeit und Höhe zeigt mir die Taranis damit auch die aktuellen GPS-Koordinaten des Copters an (und zeichnet sie ggf. auch auf der SD Karte im Sekundentakt auf). Bricht die Verbindung ab, bleibt die letzte bekannte GPS-Position auf dem Display stehen.
Ich hatte zwar Anfangs noch Schwierigkeiten, die Koordinaten in der Karten-App auf meinem iPhone zu suchen, habe dann aber herausgefunden, dass man sie nur ein wenig anders formatieren muss. Die Taranis zeigt die Koordinaten im Format 48°N 28' 58.800" 7° E 58'37.740" an. Das iPhone (Karten App und Google Earth) verstehen die Koordinaten aber nur so 48°28'58.80"N 7°58'37.74"E (also einfach das N und E nach hinten).
Hier die Absturzstelle wie von der Taranis gemeldet (linke, rote Nadel). Die rechte, lila Nadel habe ich auf dem iPhone gesetzt, als ich den Copter gefunden hatte (ich war vorher noch 2-3m Richtung offenes Feld gelaufen). Wie man sieht, war die Ortung ziemlich exakt.
Über meinen Naza-SmartPort-Adapter werde ich in Kürze noch genauer berichten. Der Prototyp funktioniert jedenfalls schon mal ziemlich gut! Ich bin jetzt erst mal dabei, das Teil noch zu miniaturisieren.
Bisher ist der Adapter noch 18x33mm groß (siehe auf dem Bild, neben der X8R) und wird einfach zwischen Naza (v1, v2 oder lite) und den SmartPort am Receiver gesteckt:
Die Konstruktion der verkleinerten Elektronik ist schon fertig (und die Bauteile bestellt), sodass ich voraussichtlich kommende Woche einen neuen Prototypen aufbauen kann, der dann nur noch 10x22mm groß ist.






