
Hallo,
das ist ein "Spinnoff"-Thread von diesem Thread um dieses Thema nicht die ganze Zeit mehr oder weniger Off-Topic in dem anderen Thread behandeln zu müssen.
Es geht um einen Adapter für Telemetriedaten von Naza (v1, v2, lite) -> FrSky SmartPort (bisher getestet mit dem X8R-Receiver) -> Taranis.
[UPDATE:
Die "Zaggometry" gibt es inzwischen bei FPV1.de zu kaufen:
http://www.fpv1.de/fpv1-zaggometry-naza2frsky-taranis-telemetrie-adapter.html
Für Support-Fragen gibt es einen extra Thread hier:
http://fpv-community.de/showthread....rSky-Taranis-Telemetrie-Adapter-Support-Thema
Und schließlich es gibt auch eine (englischsprachige) Homepage der Zaggometry:
http://pleasantsoftware.com/developer/3d/zaggometry/
]
Die Elektronik des Adapters setzt GPS-Informationen der Naza, sowie die LiPo-Spannung in SmartPort-kompatibles Format um und sendet diese dann über den Telemetrie-Rückkanal Receivers an die Taranis zurück.
Hier ein Bild von meinem ersten Prototyp. Es handelt sich noch um eine Arduino Pro mini, die ich von einem alten MultiWii-Copter noch rumliegen hatte:

Die Eingangsdaten werden direkt an der Naza, mit einem "Adapterstecker" abgenommen, der zwischen Naza, GPS-Kabel und Stromzufuhr (X3) gesteckt wird.

Es handelt sich dabei noch um eine recht unschöne Bastelei mit einer Lochrasterplatine. Eine schönere Lösung ist bereits in Vorbereitung (siehe unten).
Folgende Daten werden derzeit von der Taranis empfangen (und können optional auch aufgezeichnet werden):
- GPS-Position (der letzte empfangene Wert bleibt auch bei Verbindungsabbruch stehen und eignet sich somit sehr gut als Findehilfe bei einem gecrashten/verlorenen Copter und spart einem somit einen GPS-Tracker)
- GPS-Höhe
- GPS-Geschwindigkeit
- Kompass-Kurs
- LiPo-Spannung
Daten wie "maximale Höhe", "maximale Geschwindigkeit" usw. lassen sich aus den gesendeten Daten direkt in der Taranis generieren.
Ich hatte bei dem Projekt von Anfang an vor, keine eierlegende Wollmilchsau zu entwickeln, sondern ein möglichst keines, leichtes und einfach einzubindendes "Adapterkabel", das genau einen Zweck erfüllt (nämlich den SmartPort mit Daten von der Naza zu füttern).
Das Problem mit "Kombi-Geräten" ist, dass dann doch wieder jeder eigene, besondere Wünsche oder Hardware hat, die den schönsten, allumfassenden Ansatz wieder zunichte machen.
Deshalb mein Ansatz, dass die Telemetrie unabhängig von irgend einem OSD gesendet werden sollte. Nur so ist der Adapter auch von Leuten zu nutzen, die irgend einen beliebigen OSD haben, oder vielleicht auch überhaupt keinen OSD verwenden (bzw. nicht mal per FPV fliegen).
Nachdem ich das Ganze bei ersten Testflügen gut funktioniert hat (incl. Wiederfinden eines gecrashten Copters") ), habe ich mich daran gemacht, die Elektronik kleiner und leichter zu machen.
), habe ich mich daran gemacht, die Elektronik kleiner und leichter zu machen.
Im Laufe des Wochenendes habe ich einen zweiten Prototypen gebaut, dieses mal soweit wie möglich verkleinert (und noch mit -meinen- Hausmitteln herstellbar):

Im Ätzbad
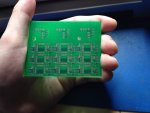
Das Panel nach dem Auflaminieren, Belichten und Entwickeln des Stopplacks. Die drei "Winkel" oben auf der Platine sind Prototypen für den Naza-Adapterstecker (als Ersatz für das Lochrasterplatinengebastel im Bild oben).

Zwei der neun Protoboards auf Endmaß ausgesägt.
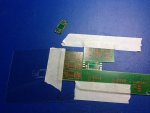
Aufbringen der SMD-Lötpaste (links die selbstgeschnittene Lötpastenmaske aus Laserkopierfolie).

Nach dem Bestücken im Lötofen.

Der fertige Prototyp.
Der zweite Prototyp ist jetzt nur noch 10x21mm groß und wiegt 0,68 Gramm.
Die Platinen für den Naza-Adapterstecker werde ich versuchen heute noch per CNC in Form zu fräsen. Allerdings warte ich auch noch auf die benötigten Buchsen, die auf diese Platine kommen. Ich hoffe, die werden Anfang der Woche geliefert.
So wie es jetzt aussieht, sollte der gesamte Adapter letztlich nicht mehr wiegen wie ein einfaches Servokabel, das zum SmartPort führt. Die Platine des derzeitigen Prototypen wiegt, wie gesagt, nur noch 0,68 Gramm und damit vermutlich weniger als das Stück Servokabel, dass sie ersetzt.
Und "sperrig" ist der Adapter auch nicht gerade: Mit den derzeit 21x10mm des aktuellen Prototypen ist die Elektronik mehr eine "etwas dickere Stelle im Kabel"...
Falls sich genug Interessenten finden, sodass sich die "professionelle" Produktion von ein paar Adaptern lohnt, wird die Elektronik sogar noch kleiner (und leichter): Die von mir für so einen Fall geplante Platine ist dann nur noch 9x18mm groß (und vermutlich noch leichter).
Allerdings kann ich die dabei verwewendete CPU nicht mehr selbst löten...
Sobald die restlichen Teile für den Adapterstecker angekommen sind und ich den neuen Prototypen testen konnte, werde ich in diesem Thread weiter berichten.
das ist ein "Spinnoff"-Thread von diesem Thread um dieses Thema nicht die ganze Zeit mehr oder weniger Off-Topic in dem anderen Thread behandeln zu müssen.
Es geht um einen Adapter für Telemetriedaten von Naza (v1, v2, lite) -> FrSky SmartPort (bisher getestet mit dem X8R-Receiver) -> Taranis.
[UPDATE:
Die "Zaggometry" gibt es inzwischen bei FPV1.de zu kaufen:
http://www.fpv1.de/fpv1-zaggometry-naza2frsky-taranis-telemetrie-adapter.html
Für Support-Fragen gibt es einen extra Thread hier:
http://fpv-community.de/showthread....rSky-Taranis-Telemetrie-Adapter-Support-Thema
Und schließlich es gibt auch eine (englischsprachige) Homepage der Zaggometry:
http://pleasantsoftware.com/developer/3d/zaggometry/
]
Die Elektronik des Adapters setzt GPS-Informationen der Naza, sowie die LiPo-Spannung in SmartPort-kompatibles Format um und sendet diese dann über den Telemetrie-Rückkanal Receivers an die Taranis zurück.
Hier ein Bild von meinem ersten Prototyp. Es handelt sich noch um eine Arduino Pro mini, die ich von einem alten MultiWii-Copter noch rumliegen hatte:
Die Eingangsdaten werden direkt an der Naza, mit einem "Adapterstecker" abgenommen, der zwischen Naza, GPS-Kabel und Stromzufuhr (X3) gesteckt wird.
Es handelt sich dabei noch um eine recht unschöne Bastelei mit einer Lochrasterplatine. Eine schönere Lösung ist bereits in Vorbereitung (siehe unten).
Folgende Daten werden derzeit von der Taranis empfangen (und können optional auch aufgezeichnet werden):
- GPS-Position (der letzte empfangene Wert bleibt auch bei Verbindungsabbruch stehen und eignet sich somit sehr gut als Findehilfe bei einem gecrashten/verlorenen Copter und spart einem somit einen GPS-Tracker)
- GPS-Höhe
- GPS-Geschwindigkeit
- Kompass-Kurs
- LiPo-Spannung
Daten wie "maximale Höhe", "maximale Geschwindigkeit" usw. lassen sich aus den gesendeten Daten direkt in der Taranis generieren.
Ich hatte bei dem Projekt von Anfang an vor, keine eierlegende Wollmilchsau zu entwickeln, sondern ein möglichst keines, leichtes und einfach einzubindendes "Adapterkabel", das genau einen Zweck erfüllt (nämlich den SmartPort mit Daten von der Naza zu füttern).
Das Problem mit "Kombi-Geräten" ist, dass dann doch wieder jeder eigene, besondere Wünsche oder Hardware hat, die den schönsten, allumfassenden Ansatz wieder zunichte machen.
Deshalb mein Ansatz, dass die Telemetrie unabhängig von irgend einem OSD gesendet werden sollte. Nur so ist der Adapter auch von Leuten zu nutzen, die irgend einen beliebigen OSD haben, oder vielleicht auch überhaupt keinen OSD verwenden (bzw. nicht mal per FPV fliegen).
Nachdem ich das Ganze bei ersten Testflügen gut funktioniert hat (incl. Wiederfinden eines gecrashten Copters
), habe ich mich daran gemacht, die Elektronik kleiner und leichter zu machen.Im Laufe des Wochenendes habe ich einen zweiten Prototypen gebaut, dieses mal soweit wie möglich verkleinert (und noch mit -meinen- Hausmitteln herstellbar):
Im Ätzbad
Das Panel nach dem Auflaminieren, Belichten und Entwickeln des Stopplacks. Die drei "Winkel" oben auf der Platine sind Prototypen für den Naza-Adapterstecker (als Ersatz für das Lochrasterplatinengebastel im Bild oben).
Zwei der neun Protoboards auf Endmaß ausgesägt.
Aufbringen der SMD-Lötpaste (links die selbstgeschnittene Lötpastenmaske aus Laserkopierfolie).
Nach dem Bestücken im Lötofen.
Der fertige Prototyp.
Der zweite Prototyp ist jetzt nur noch 10x21mm groß und wiegt 0,68 Gramm.
Die Platinen für den Naza-Adapterstecker werde ich versuchen heute noch per CNC in Form zu fräsen. Allerdings warte ich auch noch auf die benötigten Buchsen, die auf diese Platine kommen. Ich hoffe, die werden Anfang der Woche geliefert.
So wie es jetzt aussieht, sollte der gesamte Adapter letztlich nicht mehr wiegen wie ein einfaches Servokabel, das zum SmartPort führt. Die Platine des derzeitigen Prototypen wiegt, wie gesagt, nur noch 0,68 Gramm und damit vermutlich weniger als das Stück Servokabel, dass sie ersetzt.
Und "sperrig" ist der Adapter auch nicht gerade: Mit den derzeit 21x10mm des aktuellen Prototypen ist die Elektronik mehr eine "etwas dickere Stelle im Kabel"...
Falls sich genug Interessenten finden, sodass sich die "professionelle" Produktion von ein paar Adaptern lohnt, wird die Elektronik sogar noch kleiner (und leichter): Die von mir für so einen Fall geplante Platine ist dann nur noch 9x18mm groß (und vermutlich noch leichter).
Allerdings kann ich die dabei verwewendete CPU nicht mehr selbst löten...
Sobald die restlichen Teile für den Adapterstecker angekommen sind und ich den neuen Prototypen testen konnte, werde ich in diesem Thread weiter berichten.
Zuletzt bearbeitet:

