Moin Zusammen
Fliegt jemand von Euch ein X8 in Verbindung mit einem Pixhawk resp. mit Arducopter? Am besten mit einer aktuellen Firmware (3.3.3)
Ich habe bei all meinen 3 X8 Kopter Probleme mit AltHold basierten Steuermodes. Und zwar überschiesst der Kopter völlig unerwartet und unberechenbar auf Roll oder Pitch. Im Stabilize Mode tritt das Problem nicht auf.
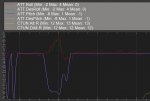
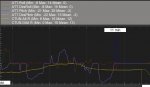
Hier kurz ein Vergleich einer kurzen Testsequenz im Stabilize sowie im AltHold Mode. Die Vorgehensweise ist Folgende: Schön anfliegen und der Nick (Pitch) Knüppel in Neutralstellung bringen. Im Althold Mode kippt der Kopter ganz komisch nach hinten. Ich hatte bis jetzt Glück und konnte den Kopter immer wieder retten... Es kann aber auch böse ausgehen...
Stabilize:
[video=youtube;KqRJz9XztYU]https://www.youtube.com/watch?v=KqRJz9XztYU[/video]
AltHold:
https://www.youtube.com/watch?v=cNSFbXruIBE
Ich glaube, dass ein Bug im Code vorliegt.. Beweise habe ich aber nicht. Fakt ist, dass der Flightcontroller so nicht zu gebrauchen ist (ich habe mich ernsthaft gefragt ob ich wirklich einen DJI Flugcomputer holen muss)...
Gruss Michael
Fliegt jemand von Euch ein X8 in Verbindung mit einem Pixhawk resp. mit Arducopter? Am besten mit einer aktuellen Firmware (3.3.3)
Ich habe bei all meinen 3 X8 Kopter Probleme mit AltHold basierten Steuermodes. Und zwar überschiesst der Kopter völlig unerwartet und unberechenbar auf Roll oder Pitch. Im Stabilize Mode tritt das Problem nicht auf.
Hier kurz ein Vergleich einer kurzen Testsequenz im Stabilize sowie im AltHold Mode. Die Vorgehensweise ist Folgende: Schön anfliegen und der Nick (Pitch) Knüppel in Neutralstellung bringen. Im Althold Mode kippt der Kopter ganz komisch nach hinten. Ich hatte bis jetzt Glück und konnte den Kopter immer wieder retten... Es kann aber auch böse ausgehen...
Stabilize:
[video=youtube;KqRJz9XztYU]https://www.youtube.com/watch?v=KqRJz9XztYU[/video]
AltHold:
https://www.youtube.com/watch?v=cNSFbXruIBE
Ich glaube, dass ein Bug im Code vorliegt.. Beweise habe ich aber nicht. Fakt ist, dass der Flightcontroller so nicht zu gebrauchen ist (ich habe mich ernsthaft gefragt ob ich wirklich einen DJI Flugcomputer holen muss)...
Gruss Michael