Hallo,
in diesem Thema sollen Informationen, Erfahrungen und Modifikationen von Hard- und Software
über den Sensor Frsky FVHS-02H gebündelt werden. (Vornehmlich in deutscher Sprache.)

Für mich stellt das Gerät zunächst einen Ducksensor dar, der erst mit passender Software zu einem guten Variometer werden kann.
Aus der Beschreibung des Herstellers
http://www.frsky-rc.com/product/pro.php?pro_id=111
und
http://www.frsky-rc.com/download/vi...file=Instruction Manual for Variometer Sensor
und
http://www.eflightwiki.com/eflightwiki/index.php?title=FrSky_Telemetry#FVAS-02_Variometer_Sensor
kann man folgendes entnehmen:
Sensor, der direkt an Telemtrie-Emfpänger der Firma Frsky angeschlossen werden kann, welche die Sensordaten an die Bodenfunkstelle senden.
Es gibt den Sensor in zwei Sensorausführungen: Entweder mit 1m Höhenauflösung oder mit 10cm Höhenauflösung.
Zum einen liefert er ein analoges Signal für den Differenzdruck, dem die barometrische Höhe zugeordnet werden kann. Diese Analogsignal kann für die Telemtrieempfänger älterer Bauart von Frsky genutzt werden, die noch analoge Eingänge für Sensoren haben.
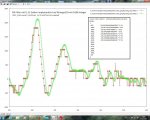
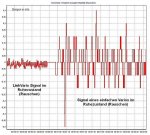
Zum anderen liefert er ein digitales Signal für Höhe und für eine nicht näher beschriebene Höhendifferenzierung, die als Variometersignal bezeichnet wird.
Digitale Signale von Sensoren werden über einen Datenbus, der beim Hersteller Frsky "Smart Port" heißt, den entsprechend ausgerüsteten Empfängern bereitgestellt.
Es können offenbar noch weitere analoge Sensoren an das Gerät angeschlossen werden, deren Signal dann im Gerät digitalisiert und auf den "Smart Port"-Datenbus geleitet wird.
Geräteangaben:
Abmessungen: 31.1mm x 18.3mm x 6mm (L x B x H) (Herstellerangaben)
Masse: 3,1g
Drucksensor: MEAS5611 (10cm Druckhöhenauflösung) bzw. Bosch bmp085 (1m Auflösung)
Mikrokontroller: STM32F051C6T6
Sensorbus: 57600 Baud;Half Duplex;(Herstellerbezeichnung "Smart Port"); Protokoll siehe da: #92 http://fpv-community.de/showthread....meter-FVAS-02H&p=497104&viewfull=1#post497104
Datenaufzeichnungsrate : Einstellbar in 0.1-Sekundenschritten von 0.1s bis 25.5s . Siehe da: #103, #104, #108 http://fpv-community.de/showthread....meter-FVAS-02H&p=512797&viewfull=1#post512797
Einstellung des Vario-Tongenerators: #110 http://fpv-community.de/showthread....meter-FVAS-02H&p=516160&viewfull=1#post516160
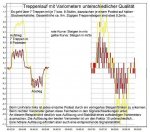
!! Variometerfunktion derzeit nicht implementiert oder fehlerhaft
!! Siehe da: http://fpv-community.de/showthread.p...l=1#post489688
Noch unbekannt:
Wie wird der Variometerwert aus dem Höhenmesserwert im Gerät ermittelt ?
Gibt es irgendwo schon einen open-source-Ansatz für eine Audioauswertung in der Taranis ?
(Berichtigungen und Ergänzungen, die an dieser Stelle eingepflegt werden sollen bitte per PN)
in diesem Thema sollen Informationen, Erfahrungen und Modifikationen von Hard- und Software
über den Sensor Frsky FVHS-02H gebündelt werden. (Vornehmlich in deutscher Sprache.)
Für mich stellt das Gerät zunächst einen Ducksensor dar, der erst mit passender Software zu einem guten Variometer werden kann.
Aus der Beschreibung des Herstellers
http://www.frsky-rc.com/product/pro.php?pro_id=111
und
http://www.frsky-rc.com/download/vi...file=Instruction Manual for Variometer Sensor
und
http://www.eflightwiki.com/eflightwiki/index.php?title=FrSky_Telemetry#FVAS-02_Variometer_Sensor
kann man folgendes entnehmen:
Sensor, der direkt an Telemtrie-Emfpänger der Firma Frsky angeschlossen werden kann, welche die Sensordaten an die Bodenfunkstelle senden.
Es gibt den Sensor in zwei Sensorausführungen: Entweder mit 1m Höhenauflösung oder mit 10cm Höhenauflösung.
Zum einen liefert er ein analoges Signal für den Differenzdruck, dem die barometrische Höhe zugeordnet werden kann. Diese Analogsignal kann für die Telemtrieempfänger älterer Bauart von Frsky genutzt werden, die noch analoge Eingänge für Sensoren haben.
Zum anderen liefert er ein digitales Signal für Höhe und für eine nicht näher beschriebene Höhendifferenzierung, die als Variometersignal bezeichnet wird.
Digitale Signale von Sensoren werden über einen Datenbus, der beim Hersteller Frsky "Smart Port" heißt, den entsprechend ausgerüsteten Empfängern bereitgestellt.
Es können offenbar noch weitere analoge Sensoren an das Gerät angeschlossen werden, deren Signal dann im Gerät digitalisiert und auf den "Smart Port"-Datenbus geleitet wird.
Geräteangaben:
Abmessungen: 31.1mm x 18.3mm x 6mm (L x B x H) (Herstellerangaben)
Masse: 3,1g
Drucksensor: MEAS5611 (10cm Druckhöhenauflösung) bzw. Bosch bmp085 (1m Auflösung)
Mikrokontroller: STM32F051C6T6
Sensorbus: 57600 Baud;Half Duplex;(Herstellerbezeichnung "Smart Port"); Protokoll siehe da: #92 http://fpv-community.de/showthread....meter-FVAS-02H&p=497104&viewfull=1#post497104
Datenaufzeichnungsrate : Einstellbar in 0.1-Sekundenschritten von 0.1s bis 25.5s . Siehe da: #103, #104, #108 http://fpv-community.de/showthread....meter-FVAS-02H&p=512797&viewfull=1#post512797
Einstellung des Vario-Tongenerators: #110 http://fpv-community.de/showthread....meter-FVAS-02H&p=516160&viewfull=1#post516160
!! Variometerfunktion derzeit nicht implementiert oder fehlerhaft
!! Siehe da: http://fpv-community.de/showthread.p...l=1#post489688
Noch unbekannt:
Wie wird der Variometerwert aus dem Höhenmesserwert im Gerät ermittelt ?
Gibt es irgendwo schon einen open-source-Ansatz für eine Audioauswertung in der Taranis ?
(Berichtigungen und Ergänzungen, die an dieser Stelle eingepflegt werden sollen bitte per PN)
Zuletzt bearbeitet von einem Moderator: