ich wollte hier nun auch mal separat einen teil zur mythen klärung beitragen ")
ich beschränke mich hier auf den teil den ich weiss. also BLDC motoren und brushless steller (regler sind genau genommen nur die, die einen regler [z.b. PI] in der software haben)
dennoch bin ich natürlich nicht unfehlbar wenn also etwas nicht stimmt, sagt es bitte!
zu den BL stellern:
1. alle steller sind in der teillast immer etwas ineffektiver als bei vollgas.
das liegt daran das in der teillast der strom zerhackt werden muss. das zerhacken kostet immer etwas energie.
2. steller mit aktivem freilauf (engl. active freewheeling) haben kein problem mit bestimmten gas stellungen.
steller ohne aktivem freilauf haben immer mehr verlusste durch die fet- body dioden. besonders bei hohen gas stellungen (meist. zwischen 60 und 100%).
3. das max ampere rating eines stellers sagt nix über seinen optimalen wirkberreich aus. es stimmt also nicht das ein 20A steller an einem motor der nur 6A zieht schlechter ist als ein 6A steller (es seiden er ist schwerer ).
die steller mit höherem ampere rating sind meist effizienter da sie fet's mit geringerem widerstand haben.
4. steller bestimmen nicht die drehzahl eines motors. das machen spannung und KV des motors. der steller passt sich dem an. natürlich dreht der motor nur mit halber geschwindigkleit bei 50% gas. ausgenommen hiervon sind regler die gewisse drehzahlen halten und das timing was die drehzahl um ein paar % ändern kann.
5. das timing ist nicht nur für einen sauberen lauf (keine sync probleme) zuständing. eigentlich ist ein festes timing im teillastbereich bei wechselnder lasst immer falsch. das timing (so gesehen eine frühzündung) soll die zeitverzögerung zwischen beschalten einer motor phase und deren vollen aufladung ausgleichen. diese zeit ändert sich aber nicht nur von motor zu motor sondern ist auch belastungs abhängig. bei höherem strombedarf dauert das laden länger. so ist ein gutes autotiming bei coptern meistens besser als ein fesets.
6. regenerative braking (regeneratives bremsen) schiebt zwar strom und spannung zurück richting lipo aber nur in kurzen starken spizen. so ist der ladeeffekt warscheinlich nicht bemerkenswert. viel wichtiger ist das der motor aktiv gebremst wird beim runterregeln.
BTW. regenerativ braking zieht immer eine art aktiven freilauf mit sich (wie gut der AF dann wirkt, hängt von der schaltgeschwindigkeit des reglers ab), aber aktiver freilauf geht auch ohne reg. braking.
BLDC motoren
1.* wenn man den gleichen motor mit verschiedenen wicklungen (verschiedene KV // RpM/Volt) nimmt:
- ist elektrisch gesehn der mit der höchsten KV der effektivste. (geringste ohmische wiederstand also am wenigsten verluste)
- ist mechanisch gesehen der mit der niedrigsten KV der effektivste (am wenigsten reibungs und ummagnetisierungs verlusste).
- kann in der regel der mit der höchsten KV am meisten watt umsetzen.
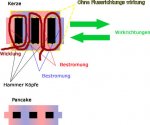
2.* länglichere motoren "kerzen" sind elektrisch gesehn effektiver als pancakes (flache). das liegt daran das die wicklungen nur in quer richtung wirken. der teil der wicklung der vor und hinter dem hammerkopf ist erzeugt nur verlusste. allerdings sorgt ein großer radius für einen größeren hebel.. also mehr drehmoment.
*das bestätigt sich dadurch das die effektivsten el. antriebe aus einem hochdrehenden schmalen innenleufer mit getriebe bestehen.
3. theoretisch kann man jeden motor an jeder spannung (lipo anzahl/S) betreiben. limitierend ist hier eigentlich nur die mechanik (lager und festigkeit der magnete und glocke). und die max. drehfelddrehzahl des stellers/reglers. allerdings muss bei erhöhung der spannung auch immer der propeller angepasst werden. da der motor immer gleich viel strom ab kann.
hier ein Motorspulen El. wiederstands Rechner http://ultraesc.de/downloads/MCRlosses.html
4. die polzahl (magnetpole) eines motors sagt nicht wirklich etwas über die leisstung oder eff. des motors aus. bei hochpoligen motoren hat man meisstens auch mehr stator slots/hammerköpfe und so verteilt sich die wicklung auf mehrere. so hat man oft nicht soviele kupferdraht lagen übereinander was von vorteil ist. allerdings steigen die ummagnetisierungsverlusste im eisen mit mehr polen (bei gleicher drehzahl).
ausserdem lassen sich motoren mit vielen magnetpolen oft feiner regeln. das liegt daran das der regler pro udrehung mehr feedback (zerocrossings) bekommt als bei motoren mit wenig polen.
5. der stator (bei aussenlufern der eisenkern um den die wicklungen liegen) ist meistens aus dünnen blechen gestapelt. diese sind flächig untereinander durch eine lack beschichtung isoliert(größtenteils). so verhindert man zu starke wirbelströme (http://de.wikipedia.org/wiki/Wirbelstrom) im eisen kern. je dünner diese bleche desto geringer die wirbelströme/umagnetisierungsverlusste... aber es sinkt auch der eisen anteil im stator (mehr isolierung).
so sind motoren mit wenig polen und geringer drehzahl mit wenigen dickeren blechen, und hoch drehende mit vielen polen mit dünnen blechen effektiver.
soweit erstmal
gruß
Felix
ich beschränke mich hier auf den teil den ich weiss. also BLDC motoren und brushless steller (regler sind genau genommen nur die, die einen regler [z.b. PI] in der software haben)
dennoch bin ich natürlich nicht unfehlbar
wenn also etwas nicht stimmt, sagt es bitte!zu den BL stellern:
1. alle steller sind in der teillast immer etwas ineffektiver als bei vollgas.
das liegt daran das in der teillast der strom zerhackt werden muss. das zerhacken kostet immer etwas energie.
2. steller mit aktivem freilauf (engl. active freewheeling) haben kein problem mit bestimmten gas stellungen.
steller ohne aktivem freilauf haben immer mehr verlusste durch die fet- body dioden. besonders bei hohen gas stellungen (meist. zwischen 60 und 100%).
3. das max ampere rating eines stellers sagt nix über seinen optimalen wirkberreich aus. es stimmt also nicht das ein 20A steller an einem motor der nur 6A zieht schlechter ist als ein 6A steller (es seiden er ist schwerer
).die steller mit höherem ampere rating sind meist effizienter da sie fet's mit geringerem widerstand haben.
4. steller bestimmen nicht die drehzahl eines motors. das machen spannung und KV des motors. der steller passt sich dem an. natürlich dreht der motor nur mit halber geschwindigkleit bei 50% gas. ausgenommen hiervon sind regler die gewisse drehzahlen halten und das timing was die drehzahl um ein paar % ändern kann.
5. das timing ist nicht nur für einen sauberen lauf (keine sync probleme) zuständing. eigentlich ist ein festes timing im teillastbereich bei wechselnder lasst immer falsch. das timing (so gesehen eine frühzündung) soll die zeitverzögerung zwischen beschalten einer motor phase und deren vollen aufladung ausgleichen. diese zeit ändert sich aber nicht nur von motor zu motor sondern ist auch belastungs abhängig. bei höherem strombedarf dauert das laden länger. so ist ein gutes autotiming bei coptern meistens besser als ein fesets.
6. regenerative braking (regeneratives bremsen) schiebt zwar strom und spannung zurück richting lipo aber nur in kurzen starken spizen. so ist der ladeeffekt warscheinlich nicht bemerkenswert. viel wichtiger ist das der motor aktiv gebremst wird beim runterregeln.
BTW. regenerativ braking zieht immer eine art aktiven freilauf mit sich (wie gut der AF dann wirkt, hängt von der schaltgeschwindigkeit des reglers ab), aber aktiver freilauf geht auch ohne reg. braking.
BLDC motoren
1.* wenn man den gleichen motor mit verschiedenen wicklungen (verschiedene KV // RpM/Volt) nimmt:
- ist elektrisch gesehn der mit der höchsten KV der effektivste. (geringste ohmische wiederstand also am wenigsten verluste)
- ist mechanisch gesehen der mit der niedrigsten KV der effektivste (am wenigsten reibungs und ummagnetisierungs verlusste).
- kann in der regel der mit der höchsten KV am meisten watt umsetzen.
2.* länglichere motoren "kerzen" sind elektrisch gesehn effektiver als pancakes (flache). das liegt daran das die wicklungen nur in quer richtung wirken. der teil der wicklung der vor und hinter dem hammerkopf ist erzeugt nur verlusste. allerdings sorgt ein großer radius für einen größeren hebel.. also mehr drehmoment.
*das bestätigt sich dadurch das die effektivsten el. antriebe aus einem hochdrehenden schmalen innenleufer mit getriebe bestehen.
3. theoretisch kann man jeden motor an jeder spannung (lipo anzahl/S) betreiben. limitierend ist hier eigentlich nur die mechanik (lager und festigkeit der magnete und glocke). und die max. drehfelddrehzahl des stellers/reglers. allerdings muss bei erhöhung der spannung auch immer der propeller angepasst werden. da der motor immer gleich viel strom ab kann.
hier ein Motorspulen El. wiederstands Rechner http://ultraesc.de/downloads/MCRlosses.html
4. die polzahl (magnetpole) eines motors sagt nicht wirklich etwas über die leisstung oder eff. des motors aus. bei hochpoligen motoren hat man meisstens auch mehr stator slots/hammerköpfe und so verteilt sich die wicklung auf mehrere. so hat man oft nicht soviele kupferdraht lagen übereinander was von vorteil ist. allerdings steigen die ummagnetisierungsverlusste im eisen mit mehr polen (bei gleicher drehzahl).
ausserdem lassen sich motoren mit vielen magnetpolen oft feiner regeln. das liegt daran das der regler pro udrehung mehr feedback (zerocrossings) bekommt als bei motoren mit wenig polen.
5. der stator (bei aussenlufern der eisenkern um den die wicklungen liegen) ist meistens aus dünnen blechen gestapelt. diese sind flächig untereinander durch eine lack beschichtung isoliert(größtenteils). so verhindert man zu starke wirbelströme (http://de.wikipedia.org/wiki/Wirbelstrom) im eisen kern. je dünner diese bleche desto geringer die wirbelströme/umagnetisierungsverlusste... aber es sinkt auch der eisen anteil im stator (mehr isolierung).
so sind motoren mit wenig polen und geringer drehzahl mit wenigen dickeren blechen, und hoch drehende mit vielen polen mit dünnen blechen effektiver.
soweit erstmal
gruß
Felix
Zuletzt bearbeitet: