
Hallo WiiCopter-Fans!
hier entsteht eine schrittweise Bauanleitung für einen Wii Quadro Copter für FPV.
Ein Bericht von Heiko Mey und Stefan B.
Quadrocopter WiiCopter
Tricopter, Quadrocopter bzw. Multicopter erfreuen sich immer größerer Beliebtheit.
Der Franzose Alexandre Dubus aus Paris hat in diesem Bereich ein einzigartiges Projekt auf die Beine gestellt. Ursprünglich wurden die Sensoren der Nintendo Wii Motion Plus und des Nintendo Nunchuks verwendet, deshalb auch der Name WiiCopter. Was mit einem Tricopter begann ist nun ein Multicopter Projekt, das vom Tricopter bis zum Hexacopter verschiedene Copterarten abdeckt.
Seine neue Internetseite befindet sich inkl. eigenem Forum hier: www.multiwii.com
Die Entwicklung der Wii Plattform schreitet schnell voran. Eine Kamerastabilisierung wurde bereits implementiert, aber auch auch GPS und Ultraschallsensoren stehen auf der Entwicklungsliste. Gerade aber eben aus diesen Gründen ist der MultiwiiCopter für FPV sehr interessant. Die geringen Kosten für eine fertige Steuerungsplattform und die stetig wachsende Community sind noch ein weiterer großer Vorteil.
Wir haben uns entschieden einen Wii Quadro Copter im X-Modus als FPV Plattform aufzubauen und Euch eine Step-by-Step Anleitung zu liefern.
Der Quadrocopter hat im Vergleich zum Tricopter den Vorteil, dass wir keine Mechanik brauchen und somit der Copter mit einfachsten Mitteln aufzubauen ist.
Der X-Flugmodus ist aufgrund der Kameramontage zu bevorzugen, damit wir das Immersionsgefühl in vollen Zügen genießen können.
1. Komponenten - Einkaufsliste
Wir behandeln im Baubericht nur die Hauptkomponenten zum Bau eines FPV Wii Copters. Als Fernsteuerung, für einen Standard Wii Copter, wird mindestens eine 4 Kanal Anlage benötigt. Für unseren Bericht wird jedoch eine Fernsteuerung mit mind. 5 Kanälen verwendet. Damit können wir mittels Schalter zwischen "head holding" und "ACC"-Modus wechseln.
Zu erst steht natürlich einmal Einkaufen am Plan.
Die Wahl der richtigen Komponenten spielt eine entscheidende Rolle. Hier wird bereits entschieden ob das Projekt gelingt oder scheitert.
Wir haben uns für die 450-500mm Copterklasse mit einem Gewicht von 800-1000g entschieden.
Der Copter ist für einen 3s1p 2200mAh Lipo ausgelegt, welcher der klassische FPV Lipo für viele Flugobjekte sein sollte. Wir haben einen 40C Lipo verwendet, damit wir die fast 600W bei Vollgas zur Verfügung stellen konnten. Grundsätzlich reicht aber auch ein 20-30C Lipo, da ein Copter im FPV Einsatz meistens nicht im Vollgasbetrieb durch die Gegend gescheucht wird.
Der Copter kann ohne Probleme noch eine Foto- oder Videokamera, wie zum Beispiel die beliebte GoPro HD, tragen.
Für die Steuerungsplatine haben wir uns für die Jussi Platine von Jussi Hermansen aus Dänemark entschieden. Sie ist relativ günstig, sehr kompakt und von den Abmessungen her kompatibel mit den Standardplatinen wie MK, Plejad, … .
Weiters hat man alle benötigten Anschlüsse vorbereitet und kann die verschiedensten Sensoren verwenden.
Bei den Sensoren wurden für die Gyroskope die „original“ Nintendo Wii Motion Plus verwendet, da nur bei dieser die problemlose Funktion gewährleistet ist. Wegen ein paar Euro sollte man hier auch keinen Fall eine billige Kopie kaufen.
Beim Beschleunigungssensor haben wir uns jedoch für den BMA020 von ELV entschieden. Er ist günstiger, kleiner und genauer als der Nintendo Nunchuk.
Für die Spannungsversorgung der Platine und Sensoren haben wir einen eigenen Recom Schaltregler verwendet. Dieser garantiert eine störungsfreie und gleichmäßige Spannungsversorgung.
Beim Rahmen kann man sich entweder selbst einen Rahmen bauen oder einen fertigen Bausatz kaufen. Hier ist es jedem selbst überlassen, was für eine Wahl er trifft. Man sollte nur auf folgende wichtige Punkte achten:
- möglichst steif, damit die Regelung später gut funktionieren kann
- nicht zu schwer, weil höheres Gewicht die Flugzeit stark reduziert
- stabil, damit als Anfänger nicht bei der ersten härteren Landung ein Totalschaden entsteht
Gerade für den Anfänger prädestinieren sich hier die Rahmen mit 10x10x1mm Baumarktaluauslegern.
Beim Antrieb verwenden wir günstige, aber dennoch gute Hobbyking Produkte. Zum einen den relativ effizienten Turnigy 2213-20 Motor und die sehr günstigen HK SuperSimple 18-20A Regler. Eine gute Alternative für die HK SS Regler sind die qualitativ höherwertigen Turnigy Plush 18A oder 25A Regler.
Mit der passenden Programmierkarte kann man bei den Reglern schnell die passenden Parameter einstellen.
Grundsätzlich sollte man gleich einen Motor und einen Regler als Ersatz zusätzlich mitbestellen, damit man im Reparaturfall schnell wieder in der Luft ist.
Bei den Propellern sollte man auf jeden Fall die höherwertigen MaxxPro EPP1045 oder die etwas günstigeren Gemfan SF1045 Propeller verwenden. Man benötigt jeweils 2x links und 2x rechts laufende Propeller für einen Quadrocopter. Man sollte sich auch hier mehrere Propeller auf Lager legen. Gerade als Anfänger hat man hier einen etwas größeren Verschleiß.
Von den GWS 3-Blatt oder auch den neuen GWS 2-Blatt Pusher und Puller Propellern rate ich ab. Erstere sind aufgrund ihres Gewichtes und des Problems des Wuchtens nicht ideal. Zweitere sind generell sehr schlecht verarbeitet und nicht für unsere Zwecke zu gebrauchen.
Alle restlichen benötigen Komponenten sind in der Einkaufsliste kurz beschrieben.
Ihr könnt die Liste einmal als PDF und einmal als interaktive Excel Liste herunterladen. Bei der Excel Liste hat man eine schöne Übersicht über die Bestellvorgänge und auch eine Kostenübersicht.
aktueller Stand: 04.09.2011
Anhang anzeigen Einkaufsliste WiiCopter - (c) FPV-Community.zip
Anhang anzeigen Einkaufsliste WiiCopter - (c) FPV-Community.pdf
2. Vorbereitung - Wii Motion Plus Sensor
Wir müssen nun aus dem Nintendo Wii Motion Plus Gerät die benötigte Platine ausbauen.

1. Öffnen des Gehäuses
Mittels eines Schlitzschraubenziehers die beiden Schrauben lösen. Alternativ kann man die Schrauben einfach ausbohren.





2. Platine herausnehmen
Die beiden weißen Plastik-Krallen nach innen drücken und Platine vorsichtig herausnehmen.


3. Stecker abtrennen
Von beiden Steckern die Kabel durchtrennen

4. Nunchuk Kabel entfernen
Das Flachbandkabel mit der Schere in die einzeln Adern zerschneiden. Anschließend die einzelnen Adern ablöten. Dazu einfach das Board auf den Rücken drehen. Von unten an einer einzelnen Ader mit einer Pinzette anziehen und von oben mit dem Lötkolben auf den Lötpunkt heizen.


5. Wii Motion Kabel entfernen
Den weißen Stecker mit einem Seitenschneider der Länge nach in der Mitte aufzwicken, so dass die Kontakte offen liegen.



Anschließend die einzelnen Kabeln ablöten. Dazu einfach das Board auf den Rücken drehen. Von unten an einem einzelnen Kabel mit einer Pinzette anziehen und von oben mit dem Lötkolben auf den Lötpunkt heizen. Anschließend lässt sich der letzte Rest des weißen Steckers entfernen.
6. Kontakte neu verlöten
Alle Kontakte noch einmal neu mit Lot verzinnen und die Lötstellen auf Lötbrücken untersuchen (Vorder- und Rückseite).

7. Kabel anlöten
Es werden nun die 4 farbigen Kabel mit ca. 3cm Länge an den richtigen Kontakten angelötet. (siehe Foto)
Anschließend Lötstellen reinigen (z.B.: Nitroverdünnung) und auf Lötbrücken untersuchen.


8. Schaumstoff ankleben
Auf die Unterseite der Platine den doppelseitigen Klebeschaumstoff anbringen
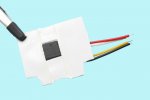
9. Fertiger Sensor

3. Vorbereitung - BMA020 Sensor
Der BMA020 Beschleunigungssensor von ELV ist bereits auf einem Breakoutboard.


1. Kabel anlöten
Verzinnt nun die Lötpads von CSB und UIN.


Dann das Verbindungskabel von CSB nach UIN anlöten.
2. Kabel anlöten
Verbindungskabel von UNI nach UPullUp anlöten (Bezeichnung der Pins auf der Rückseite der Platine).

3. Verbindung löten
Eine Lötbrücke von SD0 zu GND löten.

4. Kabel anlöten
4 farbige Kabel mit ca. 3cm Länge an die richtigen Kontakte anlöten. (CSB, SCK, SDI, GND - siehe Foto)



Anschließend Lötstellen reinigen (z.B.: Nitroverdünnung) und auf Lötbrücken untersuchen.
5. Schaumstoff ankleben
Auf die Unterseite der Platine den doppelseitigen Klebeschaumstoff anbringen
6. Fertiger Sensor

4. Vorbereitung - Signalgeber
1. Kabel anlöten (Polung achten)
Schwarzes und rotes Kabel an Signalgeber anlöten.
WiiCopter_Signalgeber_01
2. Servostecker crimpen
Servostecker ancrimpen und auf 2 Pins zuschneiden.
WiiCopter_Signalgeber_02
3. Fertiger Signalgeber
WiiCopter_Signalgeber_03
5. Zusammenbau - Steuerungsplatine
Wir verwenden in unserem Bericht die Version v1.11 (grüne Platine). Diese hatte jedoch einen kleinen Fehler. Deshalb ist die aktuell erhältliche Version bei Jussi, die Version 1.2 (schwarze Platine). Diese ist identisch mit unserem Bericht aufzubauen.
Nun beginnen wir mit der Steuerungsplatine, das Herz jeden Copters.
Dazu müssen wir die ganzen bedrahteten Bauteile auf die Platine löten.
Auf der Platine ist die jeweils die Bezeichnung des passenden Bauteils aufgedruckt. Es ist insbesondere bei den Kondensatoren auf die Polung zu achten.


1. Einlöten der Widerstände R1 bis R6
R1=R2= 4,7kOhm - PullUp Widerstände
R3= 16,9kOhm - Spannungsteiler Akku Spannungsmessung
R4= 6,8kOhm - Spannungsteiler Akku Spannungsmessung
R5=R6= 300Ohm - LED Vorwiderstände

2. Einlöten des 3,3V Spannungsreglers (auf Polung achten)

3. Einlöten der Kondensatoren C1 bis C3
C1 = 2,2µF Tantal Kondensator (auf Polung achten!) - Filterung 5V
C2 = 0,1µF Keramik Kondensator (Polung egal) - Filterung 3,3V
C3 = 0,1µF Keramik Kondensator (Polung egal) - Filterung Spannungsmessung
Die blauen Kondesatoren haben hier den Wert von 0,1µF (Beschriftung auf dem Bauteil ist 104)

Der gelbe Kondesator hat den Wert 2,2µF. Hier auf die Polung achten! Im Bild ist gut die Plus-Leitung zu sehen.

4. Einlöten der LEDs (auf Polung achten)
Alarm Led - rote Led
Status Led - grüne Led
Bei beiden Leds ist das kurze Bein der Minus Anschluss, auf der Platine befindet sich dieser am Boardrand.

5. Lötbrücke statt der Diode
Normalerweise wird an diese Stelle eine Diode eingelötet. Damit wird die Spannung auf ca. 4,2V reduziert und ebenfalls das I2C Spannungslevel auf 3,3-3,6V verringert. Dadurch kann man auch 3,3V I2C Sensoren am selben I2C Bus ohne LLC (Logic Level Converter) anhängen. Unsere zusätzlich verwendeter BMA020 hat jedoch bereits einen LLC eingebaut und somit kann die WiiM+ und der BMA020 direkt mit den 5V versorgt werden.
Dazu löten wir eine kleine Drahtbrücke als Verbindung der beiden Diodenpads.

6. Lötbrücken
Bei der Version v1.11 und v1.2 der Platine müssen noch 2 Lötbrücken gesetzt werden. Das Arduino hat nur eine begrenzte Anzahl an Ein- und Ausgängen. Man muss sich entscheiden, ob man die beiden Pins als Motorausgang 5 und 6 oder als Eingang für den Empfänger nimmt. Das heißt man benötigt für einen Hexacopter einen Empfänger mit PPM Ausgang.
Wir setzten die beiden Lötbrücken über alle 3 Pads. Somit ist eine Änderung an der Platine im Nachhinein nicht mehr notwendig. Die Auswahl wird somit über die von uns angesteckten Komponenten bestimmt. (entweder Empfänger Eingänge oder Motorausgänge)

7. Ardunio Stiftleisten anlöten
1x6 Pins abgewinkelte Stiftleiste an das Arduino anlöten.


8. Präzision-Stiftleisten anlöten
2x12 Pins und 1x2 Pins Präzisionsbuchsenleisten und 1x12 Pins, 1x11 Pins und 1x2 Pins Präzisionsstiftleisten vorbereiten.
Die Buchsenleisten werden in die Jussi Platine gesteckt. Anschließend werden die Stiftleisten mit der kegelförmigen Seite in die Buchsenleiste gesteckt. Dabei bleibt der äußerst rechte Pin ("raw") der unteren Buchsenleiste frei.
Die Arduino Platine wird auf der oberen flachen Seite der Stiftleisten platziert und verlötet.
Am besten lötet man je einen Pin am Anfang und am Ende der Platine an, damit diese fixiert ist. Anschließend erst die restlichen Pins.




9. Präzision-Buchsenleisten anlöten
Die Platine wird mit dem „Turm“ umgedreht und von unten verlötet.

10. Servo- und Buzzer-Stiftleisten anlöten
2x3 Pins und 2x2 Pins gerade Stiftleisten an zugehörigen Stellen anlöten. (siehe Foto)

11. Empfänger-Stiftleisten anlöten
1x3 Pins und 1x4 Pins gerade Stiftleisten an die Empfängereingangsanschlüsse anlöten.

12. Motor-Stiftleisten anlöten
1x6 Pins abgewinkelte Stiftleiste von unten an die Motorausgänge anlöten. Die Stiftleiste ist jedoch an der Anschlussseite zu kurz. Wir ziehen somit das schwarze Plastikleiste von den Pins ab und montieren sie auf der anderen Seite. Somit erhalten wir einerseits eine längere Anschlussseite und andererseits eine kürze Pinseite für die Platine. Diese sollten nämlich nicht an der Oberseite der Platine herausstehen.


13. I2C-Stiftleisten anlöten
1x5 Pins abgewinkelte Stiftleiste von unten an die I2C Anschlüsse anlöten. Wir wechseln auch hier wie bei Punkt 12. die Seite der schwarzen Plastikleiste.


14. Stromversorgungskabel anlöten
Ein Kabel vom + Anschluss von Motor 6 zum VCC Anschluss anlöten.

15. Spannungswandler anlöten (auf Polung achten)
Den 5V Recom Regler auf der Oberseite der Platine anlöten. Plus und Minus Anschlüsse von Motor 5 verwenden. (siehe Foto - Beschriftung vom Recom zeigt Richtung M6)
Die Pins müssen dazu etwas gekürzt werden und der freiliegende äußere Pin nach vorne Richtung M6 gebogen werden.


16. Stromversorgungskabel anlöten
Ein Kabel vom Recom zum Bat + Anschluss anlöten.

17. Kabel anlöten
Ein rotes und ein schwarzes Silikonkabel an Bat + und - Anschluss anlöten. (ca. 10cm)

18. Elektrolyt-Kondensator anlöten (auf Polung achten)
330µF ELKO auf der Oberseite der Platine anlöten. Plus und Minus Anschlüsse von Motor 1 verwenden. (siehe Foto)

19. Keramik-Kondensator anlöten
0,1µF Keramik Kondensator auf der Unterseite der Platine anlöten. Plus und Minus Anschlüsse von Motor 1 verwenden. (siehe Foto)

20. Heißkleber Sicherung
Mit Heißkleber den Recom und die Kondensatoren an die Platine ankleben, damit diese zusätzlich gegen Vibrationen gesichert sind. Zusätzlich noch die Kabel aus Schritt 14 & 16 & 17 mit Heißkleber sichern.


21. Wii Motion Plus Sensor montieren
Den Sensor ausrichten und mittels des Klebeschaumstoffs ankleben. Anschließend die 4 Kabel an den richtigen Kontakten anlöten. (siehe Foto)

22. BMA020 Sensor montieren
Den Sensor ausrichten und mittels des Klebeschaumstoffs ankleben. Anschließend die 4 Kabel an den richtigen Kontakten anlöten. (siehe Foto)


23. Verbindungsstecker anbringen
Am schwarzen und roten Silikonkabel den Minideanstecker anlöten.
WiiCopter_Platine_23
24. Fertige Platine
WiiCopter_Platine_24
6. Zusammenbau - USB Adapter
Grundsätzlich ist der USB Adapter schon Plug & Play. Wir bauen uns jedoch zusätzlich einen Adpater, damit die Spannungsversorgung vom Computer über USB und die Spannungsversorgung des Copters über den Recom nicht zusammengeschlossen werden. Dies kann nämlich zur Zerstörung von Komponenten führen.
1. Adapter bauen
1x6 Pins Stiftleiste und 1x6 Pins Buchsenleiste zusammenlöten. Zuvor jedoch den 5V Pin mit einem Seitenschneider abtrennen.

2. Beschriftung Adapter
Den erstellten Adapter oben und unten beschriften und mit Schrumpfschlauch sichern.
WiiCopter_USB_02
3. Beschriftung Platine
Den USB Adapter ebenfalls beschriften und mit Schrumpfschlauch sichern.
WiiCopter_USB_03
4. Fertiger USB Adpater

7. Zusammenbau - LCD Adapter
Der LCD Adapter ist nicht zwingend notwendig. Er erleichtert einem aber das Einstellen der Werte direkt am Platz ungemein. So kann man ohne Computer schnell die PID Werte anpassen und sofort die geänderten Einstellungen testen.
Deshalb verwenden wir diesen auch in unserem Bericht, da er eine wirkliche sinnvolle Erweiterung ist.
1. Servokabel anlöten
Am LCD wird bei den 3 Kontakten (+5V, RX und Gnd) das Servokabel angelötet.
WiiCopter_LCD_01
2. Adapter bauen
1x6 Pins Buchsenleiste an das Servokabel löten (siehe Foto). Anschließend oben und unten beschriften und mit Schrumpfschlauch sichern.
WiiCopter_LCD_02
3. LCD vor äußeren Einflüssen schützen
LCD mit Schrumpfschlauch sichern. (alternativ in ein Gehäuse einbauen)
WiiCopter_LCD_03
4. Fertiger LCD Adapter
WiiCopter_LCD_04
hier entsteht eine schrittweise Bauanleitung für einen Wii Quadro Copter für FPV.
Ein Bericht von Heiko Mey und Stefan B.
Quadrocopter WiiCopter
Tricopter, Quadrocopter bzw. Multicopter erfreuen sich immer größerer Beliebtheit.
Der Franzose Alexandre Dubus aus Paris hat in diesem Bereich ein einzigartiges Projekt auf die Beine gestellt. Ursprünglich wurden die Sensoren der Nintendo Wii Motion Plus und des Nintendo Nunchuks verwendet, deshalb auch der Name WiiCopter. Was mit einem Tricopter begann ist nun ein Multicopter Projekt, das vom Tricopter bis zum Hexacopter verschiedene Copterarten abdeckt.
Seine neue Internetseite befindet sich inkl. eigenem Forum hier: www.multiwii.com
Die Entwicklung der Wii Plattform schreitet schnell voran. Eine Kamerastabilisierung wurde bereits implementiert, aber auch auch GPS und Ultraschallsensoren stehen auf der Entwicklungsliste. Gerade aber eben aus diesen Gründen ist der MultiwiiCopter für FPV sehr interessant. Die geringen Kosten für eine fertige Steuerungsplattform und die stetig wachsende Community sind noch ein weiterer großer Vorteil.
Wir haben uns entschieden einen Wii Quadro Copter im X-Modus als FPV Plattform aufzubauen und Euch eine Step-by-Step Anleitung zu liefern.
Der Quadrocopter hat im Vergleich zum Tricopter den Vorteil, dass wir keine Mechanik brauchen und somit der Copter mit einfachsten Mitteln aufzubauen ist.
Der X-Flugmodus ist aufgrund der Kameramontage zu bevorzugen, damit wir das Immersionsgefühl in vollen Zügen genießen können.
1. Komponenten - Einkaufsliste
Wir behandeln im Baubericht nur die Hauptkomponenten zum Bau eines FPV Wii Copters. Als Fernsteuerung, für einen Standard Wii Copter, wird mindestens eine 4 Kanal Anlage benötigt. Für unseren Bericht wird jedoch eine Fernsteuerung mit mind. 5 Kanälen verwendet. Damit können wir mittels Schalter zwischen "head holding" und "ACC"-Modus wechseln.
Zu erst steht natürlich einmal Einkaufen am Plan.
Die Wahl der richtigen Komponenten spielt eine entscheidende Rolle. Hier wird bereits entschieden ob das Projekt gelingt oder scheitert.
Wir haben uns für die 450-500mm Copterklasse mit einem Gewicht von 800-1000g entschieden.
Der Copter ist für einen 3s1p 2200mAh Lipo ausgelegt, welcher der klassische FPV Lipo für viele Flugobjekte sein sollte. Wir haben einen 40C Lipo verwendet, damit wir die fast 600W bei Vollgas zur Verfügung stellen konnten. Grundsätzlich reicht aber auch ein 20-30C Lipo, da ein Copter im FPV Einsatz meistens nicht im Vollgasbetrieb durch die Gegend gescheucht wird.
Der Copter kann ohne Probleme noch eine Foto- oder Videokamera, wie zum Beispiel die beliebte GoPro HD, tragen.
Für die Steuerungsplatine haben wir uns für die Jussi Platine von Jussi Hermansen aus Dänemark entschieden. Sie ist relativ günstig, sehr kompakt und von den Abmessungen her kompatibel mit den Standardplatinen wie MK, Plejad, … .
Weiters hat man alle benötigten Anschlüsse vorbereitet und kann die verschiedensten Sensoren verwenden.
Bei den Sensoren wurden für die Gyroskope die „original“ Nintendo Wii Motion Plus verwendet, da nur bei dieser die problemlose Funktion gewährleistet ist. Wegen ein paar Euro sollte man hier auch keinen Fall eine billige Kopie kaufen.
Beim Beschleunigungssensor haben wir uns jedoch für den BMA020 von ELV entschieden. Er ist günstiger, kleiner und genauer als der Nintendo Nunchuk.
Für die Spannungsversorgung der Platine und Sensoren haben wir einen eigenen Recom Schaltregler verwendet. Dieser garantiert eine störungsfreie und gleichmäßige Spannungsversorgung.
Beim Rahmen kann man sich entweder selbst einen Rahmen bauen oder einen fertigen Bausatz kaufen. Hier ist es jedem selbst überlassen, was für eine Wahl er trifft. Man sollte nur auf folgende wichtige Punkte achten:
- möglichst steif, damit die Regelung später gut funktionieren kann
- nicht zu schwer, weil höheres Gewicht die Flugzeit stark reduziert
- stabil, damit als Anfänger nicht bei der ersten härteren Landung ein Totalschaden entsteht
Gerade für den Anfänger prädestinieren sich hier die Rahmen mit 10x10x1mm Baumarktaluauslegern.
Beim Antrieb verwenden wir günstige, aber dennoch gute Hobbyking Produkte. Zum einen den relativ effizienten Turnigy 2213-20 Motor und die sehr günstigen HK SuperSimple 18-20A Regler. Eine gute Alternative für die HK SS Regler sind die qualitativ höherwertigen Turnigy Plush 18A oder 25A Regler.
Mit der passenden Programmierkarte kann man bei den Reglern schnell die passenden Parameter einstellen.
Grundsätzlich sollte man gleich einen Motor und einen Regler als Ersatz zusätzlich mitbestellen, damit man im Reparaturfall schnell wieder in der Luft ist.
Bei den Propellern sollte man auf jeden Fall die höherwertigen MaxxPro EPP1045 oder die etwas günstigeren Gemfan SF1045 Propeller verwenden. Man benötigt jeweils 2x links und 2x rechts laufende Propeller für einen Quadrocopter. Man sollte sich auch hier mehrere Propeller auf Lager legen. Gerade als Anfänger hat man hier einen etwas größeren Verschleiß.
Von den GWS 3-Blatt oder auch den neuen GWS 2-Blatt Pusher und Puller Propellern rate ich ab. Erstere sind aufgrund ihres Gewichtes und des Problems des Wuchtens nicht ideal. Zweitere sind generell sehr schlecht verarbeitet und nicht für unsere Zwecke zu gebrauchen.
Alle restlichen benötigen Komponenten sind in der Einkaufsliste kurz beschrieben.
Ihr könnt die Liste einmal als PDF und einmal als interaktive Excel Liste herunterladen. Bei der Excel Liste hat man eine schöne Übersicht über die Bestellvorgänge und auch eine Kostenübersicht.
aktueller Stand: 04.09.2011
Anhang anzeigen Einkaufsliste WiiCopter - (c) FPV-Community.zip
Anhang anzeigen Einkaufsliste WiiCopter - (c) FPV-Community.pdf
2. Vorbereitung - Wii Motion Plus Sensor
Wir müssen nun aus dem Nintendo Wii Motion Plus Gerät die benötigte Platine ausbauen.
1. Öffnen des Gehäuses
Mittels eines Schlitzschraubenziehers die beiden Schrauben lösen. Alternativ kann man die Schrauben einfach ausbohren.
2. Platine herausnehmen
Die beiden weißen Plastik-Krallen nach innen drücken und Platine vorsichtig herausnehmen.
3. Stecker abtrennen
Von beiden Steckern die Kabel durchtrennen
4. Nunchuk Kabel entfernen
Das Flachbandkabel mit der Schere in die einzeln Adern zerschneiden. Anschließend die einzelnen Adern ablöten. Dazu einfach das Board auf den Rücken drehen. Von unten an einer einzelnen Ader mit einer Pinzette anziehen und von oben mit dem Lötkolben auf den Lötpunkt heizen.
5. Wii Motion Kabel entfernen
Den weißen Stecker mit einem Seitenschneider der Länge nach in der Mitte aufzwicken, so dass die Kontakte offen liegen.
Anschließend die einzelnen Kabeln ablöten. Dazu einfach das Board auf den Rücken drehen. Von unten an einem einzelnen Kabel mit einer Pinzette anziehen und von oben mit dem Lötkolben auf den Lötpunkt heizen. Anschließend lässt sich der letzte Rest des weißen Steckers entfernen.
6. Kontakte neu verlöten
Alle Kontakte noch einmal neu mit Lot verzinnen und die Lötstellen auf Lötbrücken untersuchen (Vorder- und Rückseite).
7. Kabel anlöten
Es werden nun die 4 farbigen Kabel mit ca. 3cm Länge an den richtigen Kontakten angelötet. (siehe Foto)
Anschließend Lötstellen reinigen (z.B.: Nitroverdünnung) und auf Lötbrücken untersuchen.
8. Schaumstoff ankleben
Auf die Unterseite der Platine den doppelseitigen Klebeschaumstoff anbringen
9. Fertiger Sensor
3. Vorbereitung - BMA020 Sensor
Der BMA020 Beschleunigungssensor von ELV ist bereits auf einem Breakoutboard.
1. Kabel anlöten
Verzinnt nun die Lötpads von CSB und UIN.
Dann das Verbindungskabel von CSB nach UIN anlöten.
2. Kabel anlöten
Verbindungskabel von UNI nach UPullUp anlöten (Bezeichnung der Pins auf der Rückseite der Platine).
3. Verbindung löten
Eine Lötbrücke von SD0 zu GND löten.
4. Kabel anlöten
4 farbige Kabel mit ca. 3cm Länge an die richtigen Kontakte anlöten. (CSB, SCK, SDI, GND - siehe Foto)
Anschließend Lötstellen reinigen (z.B.: Nitroverdünnung) und auf Lötbrücken untersuchen.
5. Schaumstoff ankleben
Auf die Unterseite der Platine den doppelseitigen Klebeschaumstoff anbringen
6. Fertiger Sensor
4. Vorbereitung - Signalgeber
1. Kabel anlöten (Polung achten)
Schwarzes und rotes Kabel an Signalgeber anlöten.
WiiCopter_Signalgeber_01
2. Servostecker crimpen
Servostecker ancrimpen und auf 2 Pins zuschneiden.
WiiCopter_Signalgeber_02
3. Fertiger Signalgeber
WiiCopter_Signalgeber_03
5. Zusammenbau - Steuerungsplatine
Wir verwenden in unserem Bericht die Version v1.11 (grüne Platine). Diese hatte jedoch einen kleinen Fehler. Deshalb ist die aktuell erhältliche Version bei Jussi, die Version 1.2 (schwarze Platine). Diese ist identisch mit unserem Bericht aufzubauen.
Nun beginnen wir mit der Steuerungsplatine, das Herz jeden Copters.
Dazu müssen wir die ganzen bedrahteten Bauteile auf die Platine löten.
Auf der Platine ist die jeweils die Bezeichnung des passenden Bauteils aufgedruckt. Es ist insbesondere bei den Kondensatoren auf die Polung zu achten.
1. Einlöten der Widerstände R1 bis R6
R1=R2= 4,7kOhm - PullUp Widerstände
R3= 16,9kOhm - Spannungsteiler Akku Spannungsmessung
R4= 6,8kOhm - Spannungsteiler Akku Spannungsmessung
R5=R6= 300Ohm - LED Vorwiderstände
2. Einlöten des 3,3V Spannungsreglers (auf Polung achten)
3. Einlöten der Kondensatoren C1 bis C3
C1 = 2,2µF Tantal Kondensator (auf Polung achten!) - Filterung 5V
C2 = 0,1µF Keramik Kondensator (Polung egal) - Filterung 3,3V
C3 = 0,1µF Keramik Kondensator (Polung egal) - Filterung Spannungsmessung
Die blauen Kondesatoren haben hier den Wert von 0,1µF (Beschriftung auf dem Bauteil ist 104)
Der gelbe Kondesator hat den Wert 2,2µF. Hier auf die Polung achten! Im Bild ist gut die Plus-Leitung zu sehen.
4. Einlöten der LEDs (auf Polung achten)
Alarm Led - rote Led
Status Led - grüne Led
Bei beiden Leds ist das kurze Bein der Minus Anschluss, auf der Platine befindet sich dieser am Boardrand.
5. Lötbrücke statt der Diode
Normalerweise wird an diese Stelle eine Diode eingelötet. Damit wird die Spannung auf ca. 4,2V reduziert und ebenfalls das I2C Spannungslevel auf 3,3-3,6V verringert. Dadurch kann man auch 3,3V I2C Sensoren am selben I2C Bus ohne LLC (Logic Level Converter) anhängen. Unsere zusätzlich verwendeter BMA020 hat jedoch bereits einen LLC eingebaut und somit kann die WiiM+ und der BMA020 direkt mit den 5V versorgt werden.
Dazu löten wir eine kleine Drahtbrücke als Verbindung der beiden Diodenpads.
6. Lötbrücken
Bei der Version v1.11 und v1.2 der Platine müssen noch 2 Lötbrücken gesetzt werden. Das Arduino hat nur eine begrenzte Anzahl an Ein- und Ausgängen. Man muss sich entscheiden, ob man die beiden Pins als Motorausgang 5 und 6 oder als Eingang für den Empfänger nimmt. Das heißt man benötigt für einen Hexacopter einen Empfänger mit PPM Ausgang.
Wir setzten die beiden Lötbrücken über alle 3 Pads. Somit ist eine Änderung an der Platine im Nachhinein nicht mehr notwendig. Die Auswahl wird somit über die von uns angesteckten Komponenten bestimmt. (entweder Empfänger Eingänge oder Motorausgänge)
7. Ardunio Stiftleisten anlöten
1x6 Pins abgewinkelte Stiftleiste an das Arduino anlöten.
8. Präzision-Stiftleisten anlöten
2x12 Pins und 1x2 Pins Präzisionsbuchsenleisten und 1x12 Pins, 1x11 Pins und 1x2 Pins Präzisionsstiftleisten vorbereiten.
Die Buchsenleisten werden in die Jussi Platine gesteckt. Anschließend werden die Stiftleisten mit der kegelförmigen Seite in die Buchsenleiste gesteckt. Dabei bleibt der äußerst rechte Pin ("raw") der unteren Buchsenleiste frei.
Die Arduino Platine wird auf der oberen flachen Seite der Stiftleisten platziert und verlötet.
Am besten lötet man je einen Pin am Anfang und am Ende der Platine an, damit diese fixiert ist. Anschließend erst die restlichen Pins.
9. Präzision-Buchsenleisten anlöten
Die Platine wird mit dem „Turm“ umgedreht und von unten verlötet.
10. Servo- und Buzzer-Stiftleisten anlöten
2x3 Pins und 2x2 Pins gerade Stiftleisten an zugehörigen Stellen anlöten. (siehe Foto)
11. Empfänger-Stiftleisten anlöten
1x3 Pins und 1x4 Pins gerade Stiftleisten an die Empfängereingangsanschlüsse anlöten.
12. Motor-Stiftleisten anlöten
1x6 Pins abgewinkelte Stiftleiste von unten an die Motorausgänge anlöten. Die Stiftleiste ist jedoch an der Anschlussseite zu kurz. Wir ziehen somit das schwarze Plastikleiste von den Pins ab und montieren sie auf der anderen Seite. Somit erhalten wir einerseits eine längere Anschlussseite und andererseits eine kürze Pinseite für die Platine. Diese sollten nämlich nicht an der Oberseite der Platine herausstehen.
13. I2C-Stiftleisten anlöten
1x5 Pins abgewinkelte Stiftleiste von unten an die I2C Anschlüsse anlöten. Wir wechseln auch hier wie bei Punkt 12. die Seite der schwarzen Plastikleiste.
14. Stromversorgungskabel anlöten
Ein Kabel vom + Anschluss von Motor 6 zum VCC Anschluss anlöten.
15. Spannungswandler anlöten (auf Polung achten)
Den 5V Recom Regler auf der Oberseite der Platine anlöten. Plus und Minus Anschlüsse von Motor 5 verwenden. (siehe Foto - Beschriftung vom Recom zeigt Richtung M6)
Die Pins müssen dazu etwas gekürzt werden und der freiliegende äußere Pin nach vorne Richtung M6 gebogen werden.
16. Stromversorgungskabel anlöten
Ein Kabel vom Recom zum Bat + Anschluss anlöten.
17. Kabel anlöten
Ein rotes und ein schwarzes Silikonkabel an Bat + und - Anschluss anlöten. (ca. 10cm)
18. Elektrolyt-Kondensator anlöten (auf Polung achten)
330µF ELKO auf der Oberseite der Platine anlöten. Plus und Minus Anschlüsse von Motor 1 verwenden. (siehe Foto)
19. Keramik-Kondensator anlöten
0,1µF Keramik Kondensator auf der Unterseite der Platine anlöten. Plus und Minus Anschlüsse von Motor 1 verwenden. (siehe Foto)
20. Heißkleber Sicherung
Mit Heißkleber den Recom und die Kondensatoren an die Platine ankleben, damit diese zusätzlich gegen Vibrationen gesichert sind. Zusätzlich noch die Kabel aus Schritt 14 & 16 & 17 mit Heißkleber sichern.
21. Wii Motion Plus Sensor montieren
Den Sensor ausrichten und mittels des Klebeschaumstoffs ankleben. Anschließend die 4 Kabel an den richtigen Kontakten anlöten. (siehe Foto)
22. BMA020 Sensor montieren
Den Sensor ausrichten und mittels des Klebeschaumstoffs ankleben. Anschließend die 4 Kabel an den richtigen Kontakten anlöten. (siehe Foto)
23. Verbindungsstecker anbringen
Am schwarzen und roten Silikonkabel den Minideanstecker anlöten.
WiiCopter_Platine_23
24. Fertige Platine
WiiCopter_Platine_24
6. Zusammenbau - USB Adapter
Grundsätzlich ist der USB Adapter schon Plug & Play. Wir bauen uns jedoch zusätzlich einen Adpater, damit die Spannungsversorgung vom Computer über USB und die Spannungsversorgung des Copters über den Recom nicht zusammengeschlossen werden. Dies kann nämlich zur Zerstörung von Komponenten führen.
1. Adapter bauen
1x6 Pins Stiftleiste und 1x6 Pins Buchsenleiste zusammenlöten. Zuvor jedoch den 5V Pin mit einem Seitenschneider abtrennen.
2. Beschriftung Adapter
Den erstellten Adapter oben und unten beschriften und mit Schrumpfschlauch sichern.
WiiCopter_USB_02
3. Beschriftung Platine
Den USB Adapter ebenfalls beschriften und mit Schrumpfschlauch sichern.
WiiCopter_USB_03
4. Fertiger USB Adpater
7. Zusammenbau - LCD Adapter
Der LCD Adapter ist nicht zwingend notwendig. Er erleichtert einem aber das Einstellen der Werte direkt am Platz ungemein. So kann man ohne Computer schnell die PID Werte anpassen und sofort die geänderten Einstellungen testen.
Deshalb verwenden wir diesen auch in unserem Bericht, da er eine wirkliche sinnvolle Erweiterung ist.
1. Servokabel anlöten
Am LCD wird bei den 3 Kontakten (+5V, RX und Gnd) das Servokabel angelötet.
WiiCopter_LCD_01
2. Adapter bauen
1x6 Pins Buchsenleiste an das Servokabel löten (siehe Foto). Anschließend oben und unten beschriften und mit Schrumpfschlauch sichern.
WiiCopter_LCD_02
3. LCD vor äußeren Einflüssen schützen
LCD mit Schrumpfschlauch sichern. (alternativ in ein Gehäuse einbauen)
WiiCopter_LCD_03
4. Fertiger LCD Adapter
WiiCopter_LCD_04
































")

