Hallo liebe Forengemeinde!
Nachdem ich diverse Copter selbst gebaut habe, wollte ich mir eine neue Herausforderung stellen.
Seit meiner Anmeldung hier in der FPV-Community habe ich so einige Probleme nur alleine mit lesen lösen können – das spricht für das Forum! Danke an dieser Stelle.")
Da in letzter Zeit vermehrt Threads mit kleinen FPV-Coptern entstehen, habe ich meine Vorstellungen in die Tat umgesetzt und möchte euch diese nicht vorenthalten.
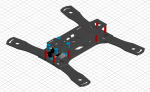
Es gibt ja unzählige Rahmen zu kaufen, jedoch gefällt mir da die Befestigung der Kamera nicht. Entweder hat man das Gefühl es wären die Propeller auf dem Bild, weil die Kamera relativ nah im Zentrum platziert wird oder die Kamera viel zu weit oben montiert wird. In meiner Variante kann die GoPro mit maximalem FOV (Field Of View, 170°) aufnehmen, ohne dass ein Propeller im Bild ist.
Beschreibung:
GoPro
Die GoPro wird mit einer Schutzlinse versehen und mittels eines Klettbandes befestigt. Das seitliche Verrutschen wird durch die zwei Winkel verhindert. Zudem wird somit die Position der Kamera beibehalten.
Akku
Der Akku wird mittels zwei Klettbändern auf der obersten ‚Top-Plate‘ befestigt.
FPV Sender
Dieser hat seinen Platz im hinteren Teil, also unterhalb des Akkus. Auf der Befestigungsplatte ist ebenfalls eine Nut für ein Klettband, um den Sender relativ schnell ausbauen zu können.
Empfänger und Satellit
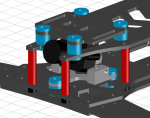
Der Hauptempfänger wird auf die ‚Grundplatte‘ in die dafür vorgesehene Ausfräsung geklebt. Somit sitzt er 5mm tiefer, damit die Abstandshalter für die ‚Top-Plate‘ kürzer werden und somit die Gesamthöhe reduziert wird. Der Satellit wird im vorderen Teil auf der ‚Top-Plate‘ befestigt.
Flugregler
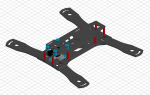
Die Flugregler werden auf den Auslegern montiert, also zwischen den beiden Nuten für die Kabelbinder. Maximale Abmessungen der Regler: 36mm x 24mm.
Landegestell
Das Landegestell werde ich mit solchen Endkappen realisieren.
http://www.drachennest.biz/shop/Baumaterialien/Kleinteile/Endkappen/Endkappen-PVC::919.html
Auswahl der Komponenten/Material sieht wie folgt aus:
(Teilweise schon bestellt oder vorhanden. Regler und Motoren fehlen mir noch).
Komponenten:
Akkus: Turnigy 2200mAh LiPo’s, 3s
Flightcontroller: Naze 32 Acro, Rev. 5
Motoren: Cobra 2204, mit 2300 kV
Regler: Afro ESC 12A, V3
Propeller: GemFan 5030
Empfänger: Spektrum AR6210 und Satellit
FPV-Kamera: Gopro Hero 3
FPV-Sender: Immersion RC 5,8Ghz, 25mW
Material:
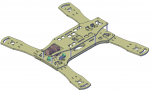
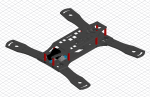
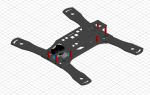
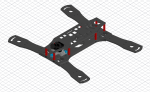
Als Material habe ich für die Ausleger eine Stärke von 3mm CFK und für die restlichen Bauteile eine Stärke von 2,0mm CFK entschieden.
Die Abstandshalter werden aus Alu mit 4mm Durchmesser gefertigt. Alle Schraubverbindungen sind im Moment mit M2,5er Schrauben, außer die Befestigung des Flightcontrollers. Diese sind in M3 ausgeführt.
Maße:
Gesamtlänge: 246,5mm
Breite: 257mm
Motormitte zu Motormitte (diagonal): 270mm
Motormitte zu Motormitte (horizontal): 175mm
Motoraufnahme: 16mm und 19mm Lochkreis (M3)
Fragen/Anregungen:
Was haltet Ihr von den verwendeten Komponenten und Materialien?
Habt ihr noch ein paar Ideen, was zum Beispiel das Design oder Änderungen am Aufbau betrifft, als her mit. Bin über jede Anregung dankbar.
Wenn es Neuerungen gibt, werde ich natürlich Berichten.
Anmerkung:
Der Rahmen befindet sich derzeit noch in der Betaphase! Alle Komponenten wurden ausschließlich in CAD gezeichnet und noch nicht gefräst. Ich kann somit keine Garantie geben, ob alle Bauteile und/ oder Komponenten so passen, wie sie sollen.
Nachdem ich diverse Copter selbst gebaut habe, wollte ich mir eine neue Herausforderung stellen.
Seit meiner Anmeldung hier in der FPV-Community habe ich so einige Probleme nur alleine mit lesen lösen können – das spricht für das Forum! Danke an dieser Stelle.
Da in letzter Zeit vermehrt Threads mit kleinen FPV-Coptern entstehen, habe ich meine Vorstellungen in die Tat umgesetzt und möchte euch diese nicht vorenthalten.
Es gibt ja unzählige Rahmen zu kaufen, jedoch gefällt mir da die Befestigung der Kamera nicht. Entweder hat man das Gefühl es wären die Propeller auf dem Bild, weil die Kamera relativ nah im Zentrum platziert wird oder die Kamera viel zu weit oben montiert wird. In meiner Variante kann die GoPro mit maximalem FOV (Field Of View, 170°) aufnehmen, ohne dass ein Propeller im Bild ist.
Beschreibung:
GoPro
Die GoPro wird mit einer Schutzlinse versehen und mittels eines Klettbandes befestigt. Das seitliche Verrutschen wird durch die zwei Winkel verhindert. Zudem wird somit die Position der Kamera beibehalten.
Akku
Der Akku wird mittels zwei Klettbändern auf der obersten ‚Top-Plate‘ befestigt.
FPV Sender
Dieser hat seinen Platz im hinteren Teil, also unterhalb des Akkus. Auf der Befestigungsplatte ist ebenfalls eine Nut für ein Klettband, um den Sender relativ schnell ausbauen zu können.
Empfänger und Satellit
Der Hauptempfänger wird auf die ‚Grundplatte‘ in die dafür vorgesehene Ausfräsung geklebt. Somit sitzt er 5mm tiefer, damit die Abstandshalter für die ‚Top-Plate‘ kürzer werden und somit die Gesamthöhe reduziert wird. Der Satellit wird im vorderen Teil auf der ‚Top-Plate‘ befestigt.
Flugregler
Die Flugregler werden auf den Auslegern montiert, also zwischen den beiden Nuten für die Kabelbinder. Maximale Abmessungen der Regler: 36mm x 24mm.
Landegestell
Das Landegestell werde ich mit solchen Endkappen realisieren.
http://www.drachennest.biz/shop/Baumaterialien/Kleinteile/Endkappen/Endkappen-PVC::919.html
Auswahl der Komponenten/Material sieht wie folgt aus:
(Teilweise schon bestellt oder vorhanden. Regler und Motoren fehlen mir noch).
Komponenten:
Akkus: Turnigy 2200mAh LiPo’s, 3s
Flightcontroller: Naze 32 Acro, Rev. 5
Motoren: Cobra 2204, mit 2300 kV
Regler: Afro ESC 12A, V3
Propeller: GemFan 5030
Empfänger: Spektrum AR6210 und Satellit
FPV-Kamera: Gopro Hero 3
FPV-Sender: Immersion RC 5,8Ghz, 25mW
Material:
Als Material habe ich für die Ausleger eine Stärke von 3mm CFK und für die restlichen Bauteile eine Stärke von 2,0mm CFK entschieden.
Die Abstandshalter werden aus Alu mit 4mm Durchmesser gefertigt. Alle Schraubverbindungen sind im Moment mit M2,5er Schrauben, außer die Befestigung des Flightcontrollers. Diese sind in M3 ausgeführt.
Maße:
Gesamtlänge: 246,5mm
Breite: 257mm
Motormitte zu Motormitte (diagonal): 270mm
Motormitte zu Motormitte (horizontal): 175mm
Motoraufnahme: 16mm und 19mm Lochkreis (M3)
Fragen/Anregungen:
Was haltet Ihr von den verwendeten Komponenten und Materialien?
Habt ihr noch ein paar Ideen, was zum Beispiel das Design oder Änderungen am Aufbau betrifft, als her mit. Bin über jede Anregung dankbar.
Wenn es Neuerungen gibt, werde ich natürlich Berichten.
Anmerkung:
Der Rahmen befindet sich derzeit noch in der Betaphase! Alle Komponenten wurden ausschließlich in CAD gezeichnet und noch nicht gefräst. Ich kann somit keine Garantie geben, ob alle Bauteile und/ oder Komponenten so passen, wie sie sollen.
Anhänge
-
 101 KB Aufrufe: 96
101 KB Aufrufe: 96