
Hallo,
nach 2 Tagen basteln muss ich jetzt doch mal um Hilfe fragen.
Wie muss ich meinen AR610 Emfpänger an die CC3D anschließen damit PPM klappt?
Ich hab alles Mögliche versucht und bekomme es einfach nicht hin.
Hier unter Post Nr. 11 http://fpv-community.de/showthread....g-von-spectrum-Empf%E4nger-%28AR7000%29/page2 wurde der Empfänger mit dem 3-adrigen Kabel auf Bind/Bat angeschlossen, in CF auf PPM umgestellt und funktioniert.
Bei mir zeigt sich das unbeeindruckt, genauso wie alles andere was ich schon versucht hab.
In Openpilot ist es das gleiche.
Der AR610 wurde richtig gebunden, auch mehrmals wiederholt.
Alternativ wurde mal ein Orange RX400 getest, machte auch kein Unterschied.
Über PWM tut sich was, wobei hier dann nichts zusammen stimmt muss dann umprogrammiert oder umgesteckt werden und ebenso muss wohl auch PIN 3 und 8 getauscht werden, was ich mal gelesen hab.
Anbei meine Screenshots und ein Foto der Verkabelung.



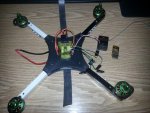
Vielen Dank schonmal.
nach 2 Tagen basteln muss ich jetzt doch mal um Hilfe fragen.
Wie muss ich meinen AR610 Emfpänger an die CC3D anschließen damit PPM klappt?
Ich hab alles Mögliche versucht und bekomme es einfach nicht hin.
Hier unter Post Nr. 11 http://fpv-community.de/showthread....g-von-spectrum-Empf%E4nger-%28AR7000%29/page2 wurde der Empfänger mit dem 3-adrigen Kabel auf Bind/Bat angeschlossen, in CF auf PPM umgestellt und funktioniert.
Bei mir zeigt sich das unbeeindruckt, genauso wie alles andere was ich schon versucht hab.
In Openpilot ist es das gleiche.
Der AR610 wurde richtig gebunden, auch mehrmals wiederholt.
Alternativ wurde mal ein Orange RX400 getest, machte auch kein Unterschied.
Über PWM tut sich was, wobei hier dann nichts zusammen stimmt muss dann umprogrammiert oder umgesteckt werden und ebenso muss wohl auch PIN 3 und 8 getauscht werden, was ich mal gelesen hab.
Anbei meine Screenshots und ein Foto der Verkabelung.
Vielen Dank schonmal.


