
Hallo Liebe Community ,
Hab die letzten freien Tage dazu genutzt , um den 3 Achs Controller an zu fangen .
Er wird zukünftig mit der Open Source Brushless Gimbal Software von uns Kompatibel sein .
Ich bin wieder auf mein "2 Platinen" Design zurück gegangen , um später den Microcontroller ohne hohen Kostenaufwand gegen einen Leistung´s Stärkeren austauschen zu können .
Technische Daten :
- Maße 42 x 42mm , mit Gehäuse dann passend für 50x50 Standard FC Montage
- Aufgeteilt in Controller und Treiber Platine
Treiber Platine :
- Keine L6234 Treiber aus Platz und Leistung´s gründen
- Treiber für insgesamt 3 Achsen
- Bis zu 10A Peak und 6A Dauerbelastung pro Achse/Treiber
- Mit Step/up Spannungs und Stromregler für jede Achse (3x 1A , 12 - 24V)
Controller Platine :
- Atmega 2560 Main Controller mit 9x 12bit PWM für die Treiber (höher Auflösung der Motoren)
- Atmega 8 Slave um bis zu 12 RC Kanäle aus zu werten
- Onboard USB für Update & Konfiguration
- Spannungssensor
- Buzzer für Akkuwarnung
Leider bin ich ab Nächste Woche erstmal für 2 Wochen außer Haus (Arbeit ), kann somit also nicht viel daran weiter machen . Danach werde ich die ersten Beta Platinen verteilen (Beta Tester sind schon gefunden).
), kann somit also nicht viel daran weiter machen . Danach werde ich die ersten Beta Platinen verteilen (Beta Tester sind schon gefunden).
Halte euch auf den laufenden
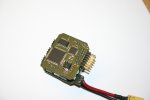
Zum Schluss noch ein Paar Bilder vom Handgelöteten Prototypen .
Grüße ,
Ludwig
Hab die letzten freien Tage dazu genutzt , um den 3 Achs Controller an zu fangen .
Er wird zukünftig mit der Open Source Brushless Gimbal Software von uns Kompatibel sein .
Ich bin wieder auf mein "2 Platinen" Design zurück gegangen , um später den Microcontroller ohne hohen Kostenaufwand gegen einen Leistung´s Stärkeren austauschen zu können .
Technische Daten :
- Maße 42 x 42mm , mit Gehäuse dann passend für 50x50 Standard FC Montage
- Aufgeteilt in Controller und Treiber Platine
Treiber Platine :
- Keine L6234 Treiber aus Platz und Leistung´s gründen
- Treiber für insgesamt 3 Achsen
- Bis zu 10A Peak und 6A Dauerbelastung pro Achse/Treiber
- Mit Step/up Spannungs und Stromregler für jede Achse (3x 1A , 12 - 24V)
Controller Platine :
- Atmega 2560 Main Controller mit 9x 12bit PWM für die Treiber (höher Auflösung der Motoren)
- Atmega 8 Slave um bis zu 12 RC Kanäle aus zu werten
- Onboard USB für Update & Konfiguration
- Spannungssensor
- Buzzer für Akkuwarnung
Leider bin ich ab Nächste Woche erstmal für 2 Wochen außer Haus (Arbeit
), kann somit also nicht viel daran weiter machen . Danach werde ich die ersten Beta Platinen verteilen (Beta Tester sind schon gefunden).Halte euch auf den laufenden
Zum Schluss noch ein Paar Bilder vom Handgelöteten Prototypen .
Grüße ,
Ludwig
Anhänge
-
 1,1 MB Aufrufe: 220
1,1 MB Aufrufe: 220 -
 1 MB Aufrufe: 192
1 MB Aufrufe: 192 -
 973,5 KB Aufrufe: 227
973,5 KB Aufrufe: 227 -
 1.018,6 KB Aufrufe: 202
1.018,6 KB Aufrufe: 202

