
Hier mal wieder nach langer Zeit ein neuer Baubericht über meinen neusten Flieger.
Habe mir den Dolphin schon länger her geholt, irgendwann Mitte letzten Jahres, einfach weil mir der Vogel auf einigen Videos optisch sehr gut gefallen hat und scheinbar sehr angenehme Flugcharakteristiken aufweist. Bin normalerweise kein großer Fan von Nurflüglern, der Dolphin vereint aber die einfache Steuerung mit nur zwei Servos mit Optik und Raumangebot eines "richtigen" Fliegers, und hat auch ein V-Leitwerk, was allerdings zumindest standardmäßig starr ist und nicht ansteuert wird - also effektiv nur die Rolle der Winglets übernimmt, dabei aber besser aussieht")
Gewählte Komponenten sind in etwa so:
- AtomRC Dolphin Kit als Basis, ohne werksseitig verbaute Servos, Motor/ESC oder Stabi
- Das gute alte Matek F405-Wing mit Inav als Herz des Ganzen
- Corona DS-929MG Servos für die Ruder, gleiche wie ich im VTOL verbaut habe - sehr gute Erfahrungen damit bisher, also warum was anderes nehmen
- TBS Crossfire mit einem Nano RX
- TBS M8.2 GPS
- Digitales FPV mit dem DJI System, spezifisch das kleine Caddx Vista Set mit der Nebula Nano (zukünftig vmtl mit Upgrade auf Nebula Pro Nano oder ähnliche bessere Kamera)
- Optional kommt noch ein digitaler Airspeed Sensor rein, liegt hier rum, bin noch nicht sicher ob ich ihn wirklich brauche
Von Anfang an war der Plan, dem Flieger einen Pan-Tilt Gimbal zu verpassen mit digitalem FPV. Auch dafür eignet sich der Dolphin meiner Meinung nach sehr gut, mit der großen abnehmbaren Haube über dem vorderen Akkufach die genug Raum bietet alle Komponenten zu platzieren, und bei späterem Änderungswunsch einfach gegen eine komplett neue getauscht werden kann.
Habe eine Weile nach einem passenden Pan/Tilt gesucht und nichts gescheides gefunden, aber einige Tage her doch auf was brauchbares gestoßen: Low Profile Pan and Tilt for FPV by Painless360. Schöner flacher Aufbau mit minimalem Querschnitt im Flugwind, eigentlich genau was ich haben wollte. Nur zwei Probleme: für meine Kamera (Caddx Nebula Nano) und angedachtes Tiltservo (FliteTest / EMAX ES9051) immer noch zu groß, und das Basisteil ließ sich nicht gut auf mein 180° Panservo (ein TGY-R5180MG) schrauben, da das eine seltsame Größe der Hornaufnahme hat die nicht mit sonstigen 9g Servos wirklich übereinstimmt.
Also packte ich doch wieder Fusion360 aus und bastelte das hier:

Definitiv stark inspiriert von dem oben verlinkten Design von Painless360, aber noch flacher und kleiner, perfekt auf die Servos und die Kamera zugeschnitten die ich nutzen will.
Und dann auch direkt in die Haube des Dolpins verbaut:

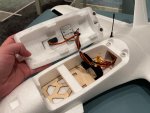
Der Tilt-Winkel nach unten ist etwas limitiert durch die flache Bauweise, die Unterkante der Kamera stößt gegen das Gehäuse des Pan-Servos - stört mich aber erstmal nicht, denke ich. Ist genau so kompakt und leichtgewichtig geworden wie ich's haben wollte, mechanisch top stabil, und läuft einwandfrei mit dem HeadTracker auf der DJI Brille und an der TX16S.
Die gezeichneten Teile habe ich nach ein paar Anfragen aus anderen Quellen auch online veröffentlicht, zu finden auf PrusaPrinters (das bessere Thingiverse ).
So sieht's also bisher insgesamt aus:



Einziges Fragezeichen ist bisher der Antrieb. Akkus stehen fest, es werden 4S Lipos geflogen die ich auch für Race-/Freestyle Copter über die Jahre immer genommen habe, sowie 4S Li-Ion Packs für mehr Ausdauer wenn's mal sein muss. Empfohlen wird für den Flieger ein 2306er Motor mit einer 6" Luftschraube - irgendwie möchte ich aber eher eine Nummer größer gehen, evtl in Richtung 7" oder sogar 8", mit etwas größerem Motor aber deutlich weniger kV als in üblichen Coptermotoren der Größe. Mir soll es bei dem Flieger nicht so sehr um Speed gehen, sondern um relativ gemütliches Daherfliegen und insbesondere Formationsflüge gehen, und ich erhoffe etwas mehr Effizienz von einem größeren Propeller - hat beim VTOL mit seinem deutlich überdimensionierten 3110er Sunnysky Motor und 10x7 Prop auch sehr gut geklappt bisher. Antrieb ist auch das Einzige was dem Flieger aktuell noch vom Aufbau her fehlt für den Erstflug.
Momentan hat mir ein Kumpel versprochen einen Hglrc Aeolus 2306.5 1900kv mit passendem ESC zu organisieren - denke das könnte mit 7x5 APC Zweiblatt zumindest einen Versuch wert sein, sonst mal sehen was man so in ähnlichen Größen oder etwas größer, zwischen 1500-1800kv findet. Sollte die nächsten Tage irgendwann kommen.
Habe mir den Dolphin schon länger her geholt, irgendwann Mitte letzten Jahres, einfach weil mir der Vogel auf einigen Videos optisch sehr gut gefallen hat und scheinbar sehr angenehme Flugcharakteristiken aufweist. Bin normalerweise kein großer Fan von Nurflüglern, der Dolphin vereint aber die einfache Steuerung mit nur zwei Servos mit Optik und Raumangebot eines "richtigen" Fliegers, und hat auch ein V-Leitwerk, was allerdings zumindest standardmäßig starr ist und nicht ansteuert wird - also effektiv nur die Rolle der Winglets übernimmt, dabei aber besser aussieht
Gewählte Komponenten sind in etwa so:
- AtomRC Dolphin Kit als Basis, ohne werksseitig verbaute Servos, Motor/ESC oder Stabi
- Das gute alte Matek F405-Wing mit Inav als Herz des Ganzen
- Corona DS-929MG Servos für die Ruder, gleiche wie ich im VTOL verbaut habe - sehr gute Erfahrungen damit bisher, also warum was anderes nehmen
- TBS Crossfire mit einem Nano RX
- TBS M8.2 GPS
- Digitales FPV mit dem DJI System, spezifisch das kleine Caddx Vista Set mit der Nebula Nano (zukünftig vmtl mit Upgrade auf Nebula Pro Nano oder ähnliche bessere Kamera)
- Optional kommt noch ein digitaler Airspeed Sensor rein, liegt hier rum, bin noch nicht sicher ob ich ihn wirklich brauche
Von Anfang an war der Plan, dem Flieger einen Pan-Tilt Gimbal zu verpassen mit digitalem FPV. Auch dafür eignet sich der Dolphin meiner Meinung nach sehr gut, mit der großen abnehmbaren Haube über dem vorderen Akkufach die genug Raum bietet alle Komponenten zu platzieren, und bei späterem Änderungswunsch einfach gegen eine komplett neue getauscht werden kann.
Habe eine Weile nach einem passenden Pan/Tilt gesucht und nichts gescheides gefunden, aber einige Tage her doch auf was brauchbares gestoßen: Low Profile Pan and Tilt for FPV by Painless360. Schöner flacher Aufbau mit minimalem Querschnitt im Flugwind, eigentlich genau was ich haben wollte. Nur zwei Probleme: für meine Kamera (Caddx Nebula Nano) und angedachtes Tiltservo (FliteTest / EMAX ES9051) immer noch zu groß, und das Basisteil ließ sich nicht gut auf mein 180° Panservo (ein TGY-R5180MG) schrauben, da das eine seltsame Größe der Hornaufnahme hat die nicht mit sonstigen 9g Servos wirklich übereinstimmt.
Also packte ich doch wieder Fusion360 aus und bastelte das hier:
Definitiv stark inspiriert von dem oben verlinkten Design von Painless360, aber noch flacher und kleiner, perfekt auf die Servos und die Kamera zugeschnitten die ich nutzen will.
Und dann auch direkt in die Haube des Dolpins verbaut:
Der Tilt-Winkel nach unten ist etwas limitiert durch die flache Bauweise, die Unterkante der Kamera stößt gegen das Gehäuse des Pan-Servos - stört mich aber erstmal nicht, denke ich. Ist genau so kompakt und leichtgewichtig geworden wie ich's haben wollte, mechanisch top stabil, und läuft einwandfrei mit dem HeadTracker auf der DJI Brille und an der TX16S.
Die gezeichneten Teile habe ich nach ein paar Anfragen aus anderen Quellen auch online veröffentlicht, zu finden auf PrusaPrinters (das bessere Thingiverse
).So sieht's also bisher insgesamt aus:
Einziges Fragezeichen ist bisher der Antrieb. Akkus stehen fest, es werden 4S Lipos geflogen die ich auch für Race-/Freestyle Copter über die Jahre immer genommen habe, sowie 4S Li-Ion Packs für mehr Ausdauer wenn's mal sein muss. Empfohlen wird für den Flieger ein 2306er Motor mit einer 6" Luftschraube - irgendwie möchte ich aber eher eine Nummer größer gehen, evtl in Richtung 7" oder sogar 8", mit etwas größerem Motor aber deutlich weniger kV als in üblichen Coptermotoren der Größe. Mir soll es bei dem Flieger nicht so sehr um Speed gehen, sondern um relativ gemütliches Daherfliegen und insbesondere Formationsflüge gehen, und ich erhoffe etwas mehr Effizienz von einem größeren Propeller - hat beim VTOL mit seinem deutlich überdimensionierten 3110er Sunnysky Motor und 10x7 Prop auch sehr gut geklappt bisher. Antrieb ist auch das Einzige was dem Flieger aktuell noch vom Aufbau her fehlt für den Erstflug.
Momentan hat mir ein Kumpel versprochen einen Hglrc Aeolus 2306.5 1900kv mit passendem ESC zu organisieren - denke das könnte mit 7x5 APC Zweiblatt zumindest einen Versuch wert sein, sonst mal sehen was man so in ähnlichen Größen oder etwas größer, zwischen 1500-1800kv findet. Sollte die nächsten Tage irgendwann kommen.





