
Hallo,
ich habe mir einen Multikopter in der X8-Anordnung mit der AutoQuad 6 Steuerung aufgebaut. Leider ist der Multikopter heute beim ersten Testflug unmittelbar nach dem Start abgestürzt:
Während dem Start und beim Steigen auf eine vorsichtige Höhe von 1-2 Metern flog der Multikopter noch sehr stabil. Doch unmittelbar danach fing er an sich aufzuschwingen und stark zu trudeln, sodass keine sichere Landung mehr möglich war. Bei der Landung kippte er schließlich um, so dass die Propeller in Mitleidenschaft gezogen wurden.
[video=youtube_share;Ywx2uECbfLY]http://youtu.be/Ywx2uECbfLY[/video]
Daten zum Kopter:
Steuerung: Autoquad 6 + Dimu (Statische + Dynamische Kalibrierung durchgeführt)
Frame: Tarot IRON MAN 650
Motoren: 8x T-Motor MN3510 (630 KV)
Propeller: 8x T-Motor 15" Carbon-Propeller
Ich nehme an, dass das ganze ein Problem der PID-Werte ist. Ich habe die PID-Werte in der Werkseinstellung gelassen und gehofft, dass dies eine gute Ausgangslage für einen ersten Testflug ist.
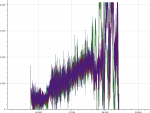
In der Logdatei meine ich zu erkennen, dass die Motoren bis an den Anschlag geregelt werden (LOG_MOT_MOTOR0 bis 3):
An welchen PID-Wert muss ich nun schrauben? Tilt Rate oder Tilt Angle?
Kann mir Jemand Beispielwerte nennen für eine ähnliche Motorisierung?
Wie kann man die PID-Werte vorsichtig ermitteln ohne wieder einen Absturz zu riskieren?
ich habe mir einen Multikopter in der X8-Anordnung mit der AutoQuad 6 Steuerung aufgebaut. Leider ist der Multikopter heute beim ersten Testflug unmittelbar nach dem Start abgestürzt:
Während dem Start und beim Steigen auf eine vorsichtige Höhe von 1-2 Metern flog der Multikopter noch sehr stabil. Doch unmittelbar danach fing er an sich aufzuschwingen und stark zu trudeln, sodass keine sichere Landung mehr möglich war. Bei der Landung kippte er schließlich um, so dass die Propeller in Mitleidenschaft gezogen wurden.
[video=youtube_share;Ywx2uECbfLY]http://youtu.be/Ywx2uECbfLY[/video]
Daten zum Kopter:
Steuerung: Autoquad 6 + Dimu (Statische + Dynamische Kalibrierung durchgeführt)
Frame: Tarot IRON MAN 650
Motoren: 8x T-Motor MN3510 (630 KV)
Propeller: 8x T-Motor 15" Carbon-Propeller
Ich nehme an, dass das ganze ein Problem der PID-Werte ist. Ich habe die PID-Werte in der Werkseinstellung gelassen und gehofft, dass dies eine gute Ausgangslage für einen ersten Testflug ist.
In der Logdatei meine ich zu erkennen, dass die Motoren bis an den Anschlag geregelt werden (LOG_MOT_MOTOR0 bis 3):
An welchen PID-Wert muss ich nun schrauben? Tilt Rate oder Tilt Angle?
Kann mir Jemand Beispielwerte nennen für eine ähnliche Motorisierung?
Wie kann man die PID-Werte vorsichtig ermitteln ohne wieder einen Absturz zu riskieren?




