
Mein neues Projekt ist die neueste Produktion aus der eyefly-Schmiede von Felias - der Goliath. Er wird komplett mit allen Features aufgebaut, die derzeit dafür verfügbar sind, also speziell gedämpfte Kamerahalterung, Landefüße, Kameragehäuse...
Im Vergleich zu meinen bisherigen Coptern ist das schon ein riesen Teil.
Hier schonmal ein kleines Preview:
Gestern kam dann das Paket an:

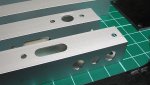
Direkt beim auspacken fällt die hervorragende Qualität der einzelnen Teile auf. Schaut man sich beispielsweise die Teile der Kameradämpfung an - dort sind für die mitgelieferten Alphagel-Würfel kleine Vertiefungen gefräst:

Die Ausleger sind absolut sauber geschintten und gebohrt und haben keinerlei Bohr- oder Fräsrückstände.
Technische Ausstattung:
folgende Komponenten sind geplant:



FPV-Ausstattung:
auch hier mal die derzeitige Planung:
Grobe Bemaßung (schnell mit dem Lineal gemessen...):

Gewicht:
Der Frame wiegt ohne Schrauben 393,7 Gramm, das Schrauben- und Abstandshalterset liegt dann nochmal bei 66,5 Gramm zusätzlich.
hier eine Übersicht der einzelnen Komponenten und deren Gewicht.
Hauptframe:
auf dem Bild sind zwei Aluteile zu sehen mit der Beschriftung "optional". Diese ersetzen die beiden länglichen Seitenteile aus GFK, wenn man den Rahmen noch steifer bauen möchte, weil evtl. viel Gewiht in der Mitte hängt. Auch hier merkt man, dass nicht nur mitgedacht wird, sondern auch die Passgenauigkeit ist beeindruckend.

Landefüße "Spider"
Die Landefüße werden mit den mitgelieferten Kunnststoffschrauben außen an den Auslegern befestigt.

Gedämpftes Kamerasystem und -gehäuse für GoPro.
Das Gehäuse hatte ich schon, daher konnte ich die Einzelteile nicht wiegen...

Update 18.11.2012
Platzierung der Komponenten
Man glaubt es kaum, aber aufgrund des großen Platzangebotes zwischen den Centerplates versucht der Perfektionist natürlich alles dazwischen unterzubringen...
Es ergaben sich verschiedene Möglichkeiten, begonnen beim 4in1 Regler. Felias hat dafür auch eine extra Zwischenplatte beigelegt, mit der man dann weiter Türmchen bauen kann. Dazu aber später mehr.
Ausleger lackieren:
hier habe ich Auto-K Sprühlack verwendet, da ich damit die besten Erfahrungen gemacht habe. Zuerst wurden die Ausleger mit feinem Schmirgelpapier angerauht und anschließend zwei mal lackiert.
Die lackierten Ausleger

Ein Triebwerk an seinem Platz - die Kabel werden durch den Ausleger nach innen geführt. Die Bohrungen dafür sind bereits vorhanden.

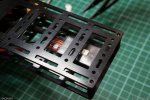
Montage des 4in1 Quattro Reglers:
Um den 4in1 Regler zu befestigen, habe ich die 4 Schrauben an den Ecken entfernt und die Löcher im Kunststoffdeckel durchgebohrt.
Somit lässt er sich von unten an der unteren Centerplate verschrauben.

die Kabel des 4in1 Reglers werden noch mit Gewebeband aus dem KfZ-Bereich umwickelt. Da ich die DJI NAZA FlightControl einsetzen werde, habe ich die Plusleitung aus dem Stecker entfernt.

Vorbereiten der Elektronik / Testlauf:
Da der nächste Schritt das Kürzen der Motorkabel ist, und diese später nicht mehr zugänglich sind, habe ich mich entschlossen, einen Testaufbau der Komponenten und einen Probelauf zu machen. Ich werde die NAZA über das Summensignal vom Graupner GR-16 HoTT ansteuern. Da dieser Schritt etwas mehr Aufwand erforderte, will ich hier ins Detail gehen - auch wenn's nicht direkt zum Goliath passt. Ich denke, dass es einige gibt, die Graupner HoTT mit dem Summensignal verwenden möchten und da die Konfiguration der NAZA - gerade in Verbindung mit GPS, Altitude hold und Failsafe etwas "tricky" ist, könnte das sehr hilfreich sein.
Alle nachfolgenden Einstellungen beziehen sich auf MODE 2. Die Flugmodi werden über die beiden linken oberen Schalter gesteuert:

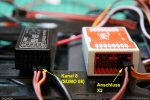
Am Empfänger wird ein male to male Kabel von Kanal 8 an Anschluss X2 vom DJI NAZA angeschlossen
Obwohl der 4in1 ein "Kombiregler" ist, müssen trotzdem alle 4 Motorsteuerungen separat angelernt werden, als wären es 4 einzelne Regler. Das Anlernen (Gasweg & Einstellungen) funktioniert genauso wie bei den üblichen Plush-Reglern. Um das einfach und schnell durchzuführen, habe ich mir ein eigenes Modell auf der Fernsteuerung eingerichtet und die Kanäle 2 bis 4 mit dem Gaskanal zusammengemischt. Somit kann man alle 4 gleichzeitig einlernen. Nach dem Einlernen wird das Pluskabel aus dem Servostecker entfernt, da das NAZA ein eigenes BEC hat.
Sind die Regler programmiert und die Gaswege eingestellt, werden die Kabel vom 4in1 Regler wie folgt am NAZA angeschlossen:

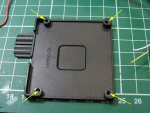
So sieht mein Testaufbau aus:

Nun ging es an die Programmierung der MX-20.
Im Telemetriemenü werden die Einstellungen für den Empfänger aufgerufen:

Dort wird das Summensignal aktiviert

Die beiden linken oberen Schalter für die Flugmodi werden auf Eingang 5 und 6 definiert:

Und jetzt wird's tricky... Die Kanäle die man unter Graupner gewohnt ist, müssen für das NAZA umsortiert werden, da dort die Belegung anders ist. Hier eine Übersicht der neuen Zuordnungen:


um in allen Flugmodis auch manuell ein "Failsafe" auslösen zu können und somit ein "Return to Home" zu erzwingen, benötigen wir einen Mischer, den wir über den Flugmodischalter legen. Dazu legt man einen freien Mischer an (Menüpunkt "Freie Mischer") - bei Typ muss ein Pfeil für Linear-Mix sein:

Mit Bestätigung des Doppelpfeils (>>) ganz rechts...

...gelangt man in die Einstellungen des Mischers, wo die Wege des Mischers so eingestellt werden, dass in jeder Stellung des 3-Stufen-Schalters der Zeiger der NAZA-Software auf "Failsafe" steht. Dazu kann man die nachfolgenden Werte schonmal grob übernehmen. Bei mir haben sie auf anhieb schon bei mehreren Konfigurationen gepasst. Notfalls müssen sie etwas angepasst werden.

Im Menü Servoeinstellungen muss noch der 3-Stufenschalter auf "S6" angepasst werden und S5 und S6 "reversed" werden.

Hier MEINE MODELLDATEI für die MX-20, die ich hier aufgezeigt habe. BENUTZUNG AUF EIGENE GEFAHR!
Anhang anzeigen aDJI Naza09.zip
Update 21.11.2012
Motor- & Reglerkabel kürzen / anklappbare Ausleger
Da der Goliath, wie der Name vermuten läßt, etwas größer ist, bietet sich die Möglichkeit an, die Ausleger anklappbar zu machen. Dazu muss man sich bereits jetzt Gedanken machen, da die Motorkabel dementsprechend angepasst werden müssen.
Es gibt verschiedene Varianten:
Beide Ausleger zur Mitte hin anzulegen, wobei hier dann die Kabel der hinteren Ausleger sehr lang gehalten werden müssen, da der Hebelweg sehr groß ist. Ein weiterer Punkt ist, dass die hinteren Kabel dann sehr viel vom wertvollen "Stauraum" einnehmen. Deswegen habe ich mich auch für die Variante entschieden, die hinteren Ausleger nach hinten anzulegen.
Zuerst werden die Kabel gekürzt und mit 3mm Goldkontaktsteckern versehen

Hier sieht man, wie großzügig die Kabel der Motoren und des 4in1 Reglers ausgelegt sind.

Die vorderen Motorkabel werden so gekürzt,...

...dass man die Motor-Ausleger nach hinten klappen kann, ohne das die Kabel unter Zug sind.

Wenn man die hinteren Ausleger auch zur Mitte hin anlegen möchte, müssen die Motorkabel aufgrund des großen Hebelweges recht lang bleiben...

...was zur Folge hat, dass die Kabel im ausgeklappten Zustand sehr weit in den "Stauraum" (rot) reichen,...

...wo in meinem Fall der Stromsensor (Extensionboard) des MyFlyDream OSDs platziert werden soll.

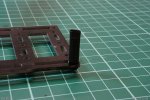
Daher habe ich mich entschieden, die hinteren Ausleger nach hinten anklappbar zu machen. Der Metall-Abstandshalter zur oberen Centerplate dient als "Anschlag" und wird dazu mit Schrumpfschlauch überzogen, damit die Ausleger nicht verkratzen.

Klappt man die hinteren Ausleger nach hinten weg, ist der Hebelweg an den Kabeln so gering,...

...dass die Kabel kaum in Bewegung sind und in der Mitte der Stauraum erhalten bleibt.

Die Seitenteile werden mit Kunststoffmuttern an die Centerplates geschraubt. Hier muss nichts geklebt werden.

Die Seitenteile grenzen den Frame schön ab und ermöglichen es, die Kabel schön zu verstecken.

Hier mal ein kleiner Gewichtszwischenstand mit montierten Centerplates oben und unten: 791 Gramm.

Update 27.11.2012
Kameragestell
Ein echtes Highlight ist die vibrationsfreie Konstruktion zur Kamerabefestigung. Das Gestell wird auch nur geschraubt und mittels Alphagelwürfel gedämpft. Diese werden mit einem Tropfen Sekundenkleber in die bereits vertieft gefrästen Mulden geklebt. Keine Sorge - das hält wirklich bombenfest.
Der Aufbau des Kameragestells - der obere, vordere Halter,...

... die Grundplatte , an der später das Kameragehäuse befestigt wird

der obere hintere Halter - hier sieht man sehr schön die Vertiefungen für die Alphagel-Würfel

Das fertige Grundgestell ohne Dämpfung.

im Vordergrund ist hier das Dämpfungssystem zu sehen - es besteht aus zwei Montageplatten für den Rahmen und vier Alphagelwürfeln.

Die Würfel werden in die vorgesehenen Mulden geklebt (eine Seite der Würfel ist selbstklebend)


Am Kameragestell werden die Halter nun mit Sekundenkleber eingesetzt...


So sieht das fertige Gestell...

...am Goliath aus.

Update 27.11.2012
Einbau RC- und Flightcontrol (DJI NAZA + GPS)
Der RC Einbau selbst beschränkt sich auf den Empfänger und das DJI NAZA. Durch Verwendung des Summensignals ergibt sich der Vorteil, dass eine Menge Kabel wegfallen, da alles über ein eiziges Kabel zwischen Empfänger und dem NAZA Modul gesteuert wird.
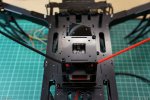
Aufbau des "Türmchens" für NAZA und Empfänger

Probesitzen auf dem Goliath.

Anschluss NAZA

Darüber der Empfänger.

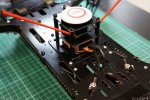
Die Antennen werden in die hinteren Abstandsbolzen integriert. Das habe ich mir beim User JR63 (Danke!) abgeschaut. Eine schöne Lösung, die Antennen sauber auszurichten. Dazu wird ein Loch im 45° Winkel in den Abstandshalter gebohrt und ein Kunststoffröhrchen (vom Servogestänge, etc.) durchgesteckt.

Das sieht dann so aus. Wer möchte, kann noch Schrumpfschlauch darüberziehen, falls er so leuchtende Röhrchen hat, wie ich")
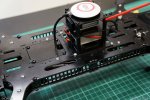
Das LED-Modul vom Naza wird nach hinten zwischen die Centerplates gelegt. Darauf achten, dass der USB-Anschluss nach außen zeigt.
Das GPS-Modul vom NAZA sitzt direkt über dem Empfänger auf der obersten Plattform. Ich habe mich diesmal gegen die "Mastlösung" entschieden, da ich mal testen möchte, ob es so auch funktioniert. Das Kabel lässt sich schön durch die vordere "Wartungsluke" verlegen.
kaum Kabel...
Fertig zum Testflug. FPV Komponenten werden nach dem Testflug verbaut.
hier mal das Video vom Erstflug. Leider waren die Wetterbedingungen eher bescheiden und eine Speicherkarte war nicht mehr zu retten, von daher nicht so spektakulär:
http://www.youtube.com/watch?v=HrJTt3BLdE4&feature=player_embedded
Update 09.12.2012
diese Woche lag noch ein Briefumschlag in meinem Briefkasten mit einer modifizierten Adapterplatte für den 4in1 Regler. Ich hatte mich mit Felias kurzgeschlossen, da ich in Verbindung mit der NAZA einen Verbesserungsvorschlag hatte, weil bei der ersten Version das NAZA nur an den Kanten auflag - und prompt wurde das umgesetzt und mir als neues Bauteil zusgesandt! Perfekt Felias!
Hier die "alte" Version (ohne Steg in der Mitte):

und die "neue" Version, mit Steg, um die Flightcontrol (NAZA) aufzukleben.

2. Testflug
Gestern fand dann noch bei -3,5° der zweite Testflug statt - mit quick-and-dirty FPV an Board: nur ein Foxtech Sender, ein 1000er LiPo und Video am Liveout der GoPro abgegriffen.
Die Kälte machte den Akkus ziemlich zu schaffen, was sich in der Flugzeit bemerkbar machte. Ein warmer Akku (3s 3600mAh) aus dem Auto hielt beim ersten Versuch knappe 3 Minuten - der zweite, welcher im Fußraum vom Auto richtig aufgeheizt wurde, hielt dann etwas über 6 Minuten. Der Frickler war wieder so nett, das Ganze zu filmen, von daher gibt's auch ein kleines Video. Bei 1080p hatte ich etwas Rolling Shutter, wobei ich dazu sagen muss, dass ich noch die weichen GemFan Props drauf habe und diese noch nicht gewuchtet sind, weil sie durch Graupner E-Props ersetzt werden. An der Stelle auch ein dickes Dankeschön an den User T-Rod, der mich mit Distanzhülsen versorgt hat! Den Rolling Shutter hatte ich bei 720p nicht.
Der 4in1 Regler:
hmmm - ich hoffe, dass es an den Temperaturen lag, denn er hat sehr träge reagiert - ähnlich wie bei einer Turbine. Sehr schön sieht man das im folgenden Video (Position 0:49), als ich in die Kurve geflogen bin und er anfängt zu sinken. Ich schob etwas Gas hinterher, was aber viel später wirkte und der Goliath dann hochsteigt. Das war gestern so extrem, dass es eigentlich nur an der Kälte gelegen haben kann, denn beim ersten Flug konnte ich das nicht feststellen.
Mein Zwischenfazit zum Goliath:
Wie nicht anders zu erwarten war, ist der Goliath mal wieder ein genialer Wurf aus der eyefly-Schmiede von Felias. "Kritikpunkte" im Aufbau wurden direkt mit Felias abgestimmt und gingen ins "Endprodukt" ein. Der Frame ist sehr robust, steif und bietet ausreichend Platz für alle Komponenten. Das durchdachte Konzept mit einer Unmenge an Möglichkeiten des Aufbaus haben mich begeistert. Durch die anklappbaren Arme lässt sich der Goliath gut transportieren.
Die Bauteile sind gewohnt hochwertig und 100% passgenau aufeinander abgestimmt. Für mich persönlich reicht ein Setup mit 3S. Er lässt sich damit dynamisch fliegen und hat genug Reserven, um auch mal zügig zu steigen. Auch das NAZA hat keinerlei Probleme mit der Steuerung - im "Altitude Hold" und "GPS-Hold" macht der Goliath genau das, was man erwartet. Auch Drehungen im GPS-Mode verlaufen wie sie sollen, ohne absinken oder abdriften.
In Verbindung mit dem neuen vibrationsfreien Dämpfungssystem bekommt man ein Paket um hervorragende Luftaufnahmen zu machen.
Hier das Video von gestern:
http://youtu.be/W6-NKAX9sng
In Kürze geht es dann hier mit dem Einbau der richtigen FPV-Ausrüstung weiter.
Update 18.01.2013
Kurzes Zwischenupdate FPV-Ausrüstung:
So wird die FPV-Kamera montiert:

Derzeitige Montage des Videosenders und der Stromversorgung - soll eigentlich eine vorübergehende Lösung sein, mal schauen, wie es letztendlich wird.



Fortsetzung folgt...
Im Vergleich zu meinen bisherigen Coptern ist das schon ein riesen Teil.
Hier schonmal ein kleines Preview:
Gestern kam dann das Paket an:
Direkt beim auspacken fällt die hervorragende Qualität der einzelnen Teile auf. Schaut man sich beispielsweise die Teile der Kameradämpfung an - dort sind für die mitgelieferten Alphagel-Würfel kleine Vertiefungen gefräst:
Die Ausleger sind absolut sauber geschintten und gebohrt und haben keinerlei Bohr- oder Fräsrückstände.
Technische Ausstattung:
folgende Komponenten sind geplant:
- Flightcontrol: DJI NAZA M + GPS
- Motoren: T-Motor MT2216 900KV
- Props: Graupner E-Props 11x5
- Regler: Skywalker Quattro 20A
- Akku: vorraussichtlich 3300 - 4000er 3S LiPo
FPV-Ausstattung:
auch hier mal die derzeitige Planung:
- GoPro HD2
- Globeflight PX-540 oder Sony SuperHAD 600
- Videosender: 5.8GHZ SkyRF 10 mW
- Antennen: CL von Rabe2000
- OSD: MFD Telefly (wegen Antennentracker)
Grobe Bemaßung (schnell mit dem Lineal gemessen...):
Gewicht:
Der Frame wiegt ohne Schrauben 393,7 Gramm, das Schrauben- und Abstandshalterset liegt dann nochmal bei 66,5 Gramm zusätzlich.
hier eine Übersicht der einzelnen Komponenten und deren Gewicht.
Hauptframe:
auf dem Bild sind zwei Aluteile zu sehen mit der Beschriftung "optional". Diese ersetzen die beiden länglichen Seitenteile aus GFK, wenn man den Rahmen noch steifer bauen möchte, weil evtl. viel Gewiht in der Mitte hängt. Auch hier merkt man, dass nicht nur mitgedacht wird, sondern auch die Passgenauigkeit ist beeindruckend.
Landefüße "Spider"
Die Landefüße werden mit den mitgelieferten Kunnststoffschrauben außen an den Auslegern befestigt.
Gedämpftes Kamerasystem und -gehäuse für GoPro.
Das Gehäuse hatte ich schon, daher konnte ich die Einzelteile nicht wiegen...
Update 18.11.2012
Platzierung der Komponenten
Man glaubt es kaum, aber aufgrund des großen Platzangebotes zwischen den Centerplates versucht der Perfektionist natürlich alles dazwischen unterzubringen...
Es ergaben sich verschiedene Möglichkeiten, begonnen beim 4in1 Regler. Felias hat dafür auch eine extra Zwischenplatte beigelegt, mit der man dann weiter Türmchen bauen kann. Dazu aber später mehr.
Ausleger lackieren:
hier habe ich Auto-K Sprühlack verwendet, da ich damit die besten Erfahrungen gemacht habe. Zuerst wurden die Ausleger mit feinem Schmirgelpapier angerauht und anschließend zwei mal lackiert.
Die lackierten Ausleger
Ein Triebwerk an seinem Platz - die Kabel werden durch den Ausleger nach innen geführt. Die Bohrungen dafür sind bereits vorhanden.
Montage des 4in1 Quattro Reglers:
Um den 4in1 Regler zu befestigen, habe ich die 4 Schrauben an den Ecken entfernt und die Löcher im Kunststoffdeckel durchgebohrt.
Somit lässt er sich von unten an der unteren Centerplate verschrauben.
die Kabel des 4in1 Reglers werden noch mit Gewebeband aus dem KfZ-Bereich umwickelt. Da ich die DJI NAZA FlightControl einsetzen werde, habe ich die Plusleitung aus dem Stecker entfernt.
Vorbereiten der Elektronik / Testlauf:
Da der nächste Schritt das Kürzen der Motorkabel ist, und diese später nicht mehr zugänglich sind, habe ich mich entschlossen, einen Testaufbau der Komponenten und einen Probelauf zu machen. Ich werde die NAZA über das Summensignal vom Graupner GR-16 HoTT ansteuern. Da dieser Schritt etwas mehr Aufwand erforderte, will ich hier ins Detail gehen - auch wenn's nicht direkt zum Goliath passt. Ich denke, dass es einige gibt, die Graupner HoTT mit dem Summensignal verwenden möchten und da die Konfiguration der NAZA - gerade in Verbindung mit GPS, Altitude hold und Failsafe etwas "tricky" ist, könnte das sehr hilfreich sein.
Alle nachfolgenden Einstellungen beziehen sich auf MODE 2. Die Flugmodi werden über die beiden linken oberen Schalter gesteuert:
Am Empfänger wird ein male to male Kabel von Kanal 8 an Anschluss X2 vom DJI NAZA angeschlossen
Obwohl der 4in1 ein "Kombiregler" ist, müssen trotzdem alle 4 Motorsteuerungen separat angelernt werden, als wären es 4 einzelne Regler. Das Anlernen (Gasweg & Einstellungen) funktioniert genauso wie bei den üblichen Plush-Reglern. Um das einfach und schnell durchzuführen, habe ich mir ein eigenes Modell auf der Fernsteuerung eingerichtet und die Kanäle 2 bis 4 mit dem Gaskanal zusammengemischt. Somit kann man alle 4 gleichzeitig einlernen. Nach dem Einlernen wird das Pluskabel aus dem Servostecker entfernt, da das NAZA ein eigenes BEC hat.
Sind die Regler programmiert und die Gaswege eingestellt, werden die Kabel vom 4in1 Regler wie folgt am NAZA angeschlossen:
So sieht mein Testaufbau aus:
Nun ging es an die Programmierung der MX-20.
Im Telemetriemenü werden die Einstellungen für den Empfänger aufgerufen:
Dort wird das Summensignal aktiviert
Die beiden linken oberen Schalter für die Flugmodi werden auf Eingang 5 und 6 definiert:
Und jetzt wird's tricky... Die Kanäle die man unter Graupner gewohnt ist, müssen für das NAZA umsortiert werden, da dort die Belegung anders ist. Hier eine Übersicht der neuen Zuordnungen:
um in allen Flugmodis auch manuell ein "Failsafe" auslösen zu können und somit ein "Return to Home" zu erzwingen, benötigen wir einen Mischer, den wir über den Flugmodischalter legen. Dazu legt man einen freien Mischer an (Menüpunkt "Freie Mischer") - bei Typ muss ein Pfeil für Linear-Mix sein:
Mit Bestätigung des Doppelpfeils (>>) ganz rechts...
...gelangt man in die Einstellungen des Mischers, wo die Wege des Mischers so eingestellt werden, dass in jeder Stellung des 3-Stufen-Schalters der Zeiger der NAZA-Software auf "Failsafe" steht. Dazu kann man die nachfolgenden Werte schonmal grob übernehmen. Bei mir haben sie auf anhieb schon bei mehreren Konfigurationen gepasst. Notfalls müssen sie etwas angepasst werden.
Im Menü Servoeinstellungen muss noch der 3-Stufenschalter auf "S6" angepasst werden und S5 und S6 "reversed" werden.
Hier MEINE MODELLDATEI für die MX-20, die ich hier aufgezeigt habe. BENUTZUNG AUF EIGENE GEFAHR!
Anhang anzeigen aDJI Naza09.zip
Update 21.11.2012
Motor- & Reglerkabel kürzen / anklappbare Ausleger
Da der Goliath, wie der Name vermuten läßt, etwas größer ist, bietet sich die Möglichkeit an, die Ausleger anklappbar zu machen. Dazu muss man sich bereits jetzt Gedanken machen, da die Motorkabel dementsprechend angepasst werden müssen.
Es gibt verschiedene Varianten:
Beide Ausleger zur Mitte hin anzulegen, wobei hier dann die Kabel der hinteren Ausleger sehr lang gehalten werden müssen, da der Hebelweg sehr groß ist. Ein weiterer Punkt ist, dass die hinteren Kabel dann sehr viel vom wertvollen "Stauraum" einnehmen. Deswegen habe ich mich auch für die Variante entschieden, die hinteren Ausleger nach hinten anzulegen.
Zuerst werden die Kabel gekürzt und mit 3mm Goldkontaktsteckern versehen
Hier sieht man, wie großzügig die Kabel der Motoren und des 4in1 Reglers ausgelegt sind.
Die vorderen Motorkabel werden so gekürzt,...
...dass man die Motor-Ausleger nach hinten klappen kann, ohne das die Kabel unter Zug sind.
Wenn man die hinteren Ausleger auch zur Mitte hin anlegen möchte, müssen die Motorkabel aufgrund des großen Hebelweges recht lang bleiben...
...was zur Folge hat, dass die Kabel im ausgeklappten Zustand sehr weit in den "Stauraum" (rot) reichen,...
...wo in meinem Fall der Stromsensor (Extensionboard) des MyFlyDream OSDs platziert werden soll.
Daher habe ich mich entschieden, die hinteren Ausleger nach hinten anklappbar zu machen. Der Metall-Abstandshalter zur oberen Centerplate dient als "Anschlag" und wird dazu mit Schrumpfschlauch überzogen, damit die Ausleger nicht verkratzen.
Klappt man die hinteren Ausleger nach hinten weg, ist der Hebelweg an den Kabeln so gering,...
...dass die Kabel kaum in Bewegung sind und in der Mitte der Stauraum erhalten bleibt.
Die Seitenteile werden mit Kunststoffmuttern an die Centerplates geschraubt. Hier muss nichts geklebt werden.
Die Seitenteile grenzen den Frame schön ab und ermöglichen es, die Kabel schön zu verstecken.
Hier mal ein kleiner Gewichtszwischenstand mit montierten Centerplates oben und unten: 791 Gramm.
Update 27.11.2012
Kameragestell
Ein echtes Highlight ist die vibrationsfreie Konstruktion zur Kamerabefestigung. Das Gestell wird auch nur geschraubt und mittels Alphagelwürfel gedämpft. Diese werden mit einem Tropfen Sekundenkleber in die bereits vertieft gefrästen Mulden geklebt. Keine Sorge - das hält wirklich bombenfest.
Der Aufbau des Kameragestells - der obere, vordere Halter,...
... die Grundplatte , an der später das Kameragehäuse befestigt wird
der obere hintere Halter - hier sieht man sehr schön die Vertiefungen für die Alphagel-Würfel
Das fertige Grundgestell ohne Dämpfung.
im Vordergrund ist hier das Dämpfungssystem zu sehen - es besteht aus zwei Montageplatten für den Rahmen und vier Alphagelwürfeln.
Die Würfel werden in die vorgesehenen Mulden geklebt (eine Seite der Würfel ist selbstklebend)
Am Kameragestell werden die Halter nun mit Sekundenkleber eingesetzt...
So sieht das fertige Gestell...
...am Goliath aus.
Update 27.11.2012
Einbau RC- und Flightcontrol (DJI NAZA + GPS)
Der RC Einbau selbst beschränkt sich auf den Empfänger und das DJI NAZA. Durch Verwendung des Summensignals ergibt sich der Vorteil, dass eine Menge Kabel wegfallen, da alles über ein eiziges Kabel zwischen Empfänger und dem NAZA Modul gesteuert wird.
Aufbau des "Türmchens" für NAZA und Empfänger
Probesitzen auf dem Goliath.
Anschluss NAZA
Darüber der Empfänger.
Die Antennen werden in die hinteren Abstandsbolzen integriert. Das habe ich mir beim User JR63 (Danke!) abgeschaut. Eine schöne Lösung, die Antennen sauber auszurichten. Dazu wird ein Loch im 45° Winkel in den Abstandshalter gebohrt und ein Kunststoffröhrchen (vom Servogestänge, etc.) durchgesteckt.
Das sieht dann so aus. Wer möchte, kann noch Schrumpfschlauch darüberziehen, falls er so leuchtende Röhrchen hat, wie ich
Das LED-Modul vom Naza wird nach hinten zwischen die Centerplates gelegt. Darauf achten, dass der USB-Anschluss nach außen zeigt.
Das GPS-Modul vom NAZA sitzt direkt über dem Empfänger auf der obersten Plattform. Ich habe mich diesmal gegen die "Mastlösung" entschieden, da ich mal testen möchte, ob es so auch funktioniert. Das Kabel lässt sich schön durch die vordere "Wartungsluke" verlegen.
kaum Kabel...
Fertig zum Testflug. FPV Komponenten werden nach dem Testflug verbaut.
hier mal das Video vom Erstflug. Leider waren die Wetterbedingungen eher bescheiden und eine Speicherkarte war nicht mehr zu retten, von daher nicht so spektakulär:
http://www.youtube.com/watch?v=HrJTt3BLdE4&feature=player_embedded
Update 09.12.2012
diese Woche lag noch ein Briefumschlag in meinem Briefkasten mit einer modifizierten Adapterplatte für den 4in1 Regler. Ich hatte mich mit Felias kurzgeschlossen, da ich in Verbindung mit der NAZA einen Verbesserungsvorschlag hatte, weil bei der ersten Version das NAZA nur an den Kanten auflag - und prompt wurde das umgesetzt und mir als neues Bauteil zusgesandt! Perfekt Felias!
Hier die "alte" Version (ohne Steg in der Mitte):
und die "neue" Version, mit Steg, um die Flightcontrol (NAZA) aufzukleben.
2. Testflug
Gestern fand dann noch bei -3,5° der zweite Testflug statt - mit quick-and-dirty FPV an Board: nur ein Foxtech Sender, ein 1000er LiPo und Video am Liveout der GoPro abgegriffen.
Die Kälte machte den Akkus ziemlich zu schaffen, was sich in der Flugzeit bemerkbar machte. Ein warmer Akku (3s 3600mAh) aus dem Auto hielt beim ersten Versuch knappe 3 Minuten - der zweite, welcher im Fußraum vom Auto richtig aufgeheizt wurde, hielt dann etwas über 6 Minuten. Der Frickler war wieder so nett, das Ganze zu filmen, von daher gibt's auch ein kleines Video. Bei 1080p hatte ich etwas Rolling Shutter, wobei ich dazu sagen muss, dass ich noch die weichen GemFan Props drauf habe und diese noch nicht gewuchtet sind, weil sie durch Graupner E-Props ersetzt werden. An der Stelle auch ein dickes Dankeschön an den User T-Rod, der mich mit Distanzhülsen versorgt hat! Den Rolling Shutter hatte ich bei 720p nicht.
Der 4in1 Regler:
hmmm - ich hoffe, dass es an den Temperaturen lag, denn er hat sehr träge reagiert - ähnlich wie bei einer Turbine. Sehr schön sieht man das im folgenden Video (Position 0:49), als ich in die Kurve geflogen bin und er anfängt zu sinken. Ich schob etwas Gas hinterher, was aber viel später wirkte und der Goliath dann hochsteigt. Das war gestern so extrem, dass es eigentlich nur an der Kälte gelegen haben kann, denn beim ersten Flug konnte ich das nicht feststellen.
Mein Zwischenfazit zum Goliath:
Wie nicht anders zu erwarten war, ist der Goliath mal wieder ein genialer Wurf aus der eyefly-Schmiede von Felias. "Kritikpunkte" im Aufbau wurden direkt mit Felias abgestimmt und gingen ins "Endprodukt" ein. Der Frame ist sehr robust, steif und bietet ausreichend Platz für alle Komponenten. Das durchdachte Konzept mit einer Unmenge an Möglichkeiten des Aufbaus haben mich begeistert. Durch die anklappbaren Arme lässt sich der Goliath gut transportieren.
Die Bauteile sind gewohnt hochwertig und 100% passgenau aufeinander abgestimmt. Für mich persönlich reicht ein Setup mit 3S. Er lässt sich damit dynamisch fliegen und hat genug Reserven, um auch mal zügig zu steigen. Auch das NAZA hat keinerlei Probleme mit der Steuerung - im "Altitude Hold" und "GPS-Hold" macht der Goliath genau das, was man erwartet. Auch Drehungen im GPS-Mode verlaufen wie sie sollen, ohne absinken oder abdriften.
In Verbindung mit dem neuen vibrationsfreien Dämpfungssystem bekommt man ein Paket um hervorragende Luftaufnahmen zu machen.
Hier das Video von gestern:
http://youtu.be/W6-NKAX9sng
In Kürze geht es dann hier mit dem Einbau der richtigen FPV-Ausrüstung weiter.
Update 18.01.2013
Kurzes Zwischenupdate FPV-Ausrüstung:
So wird die FPV-Kamera montiert:
Derzeitige Montage des Videosenders und der Stromversorgung - soll eigentlich eine vorübergehende Lösung sein, mal schauen, wie es letztendlich wird.
Fortsetzung folgt...
Zuletzt bearbeitet:

