Hallo zusammen,
da es ja schon einiges an Hard- und Software gibt hier mal eine Mechanikvariante auf 22mm Rohr-Basis wie ich sie auch an meinem Okto-V8 verwendet habe. Evtl. werde ich das Projekt mit µC-Hardware und Software erweitern, je nachdem, ob in naher Zukunft was brauchbares zu erwerben ist. Bitte zu den Zweitgenannten keine Fragen, ich werde hier posten wenn es was gibt.
Das Gimbal-Projekt von Ertan und die lange Wartezeit auf meine µC war für mich Grund genug mit einem eigenen Gimbal zu beginnen.
Randbedingungen:
Motoren: Bauhöhe bis 30mm, Durchmesser bis 52mm
Gewicht: 500-600gr, je nach Motorenwahl
Verstellbar in X und Y um das "Gleichgewicht" der CAM einzustellen
...estmal sehen was sich ergibt - eben "Happy Engineering"
Mechanik:
Anfänglich habe ich mir Gedanken über die zusätzliche Lagerung des Gimbals gemacht um die Motorenlager zu entlasten.
Dabei bin ich zu diesem Ergebnis gekommen:

Hier sieht man rechts den KDA 20-20L, ein Taumelscheibenlager, ein gefräster Adapter und ein Provisorium Gimbal. Der Adapter hat 3 Aufgaben zu erfüllen: Befestigung am Motor, Aufnahme des Lagers und die Befestigung einer Gimbalaufnahme.
Das Lager mit Adapter sieht dann so aus:

...und alles zusammengebaut:

Nochmal zur Erklärung: Gehalten wird das Ganze am Motor und um das Lager, wie auf den folgenden Bilder zu sehen ist.
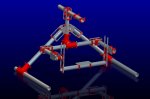
Dann habe ich die einzelnen Teile entworfen und gefräst...
Hier das Gimbal mit fertiger Nickachse und Roll-Aufnahme. Der Rollmotor wird genausso wie der Nichmotor befestigt. Das kann sich ja jeder leicht vorstellen (CFK-Reste sind alle weg - erstmal neues bestellt)
(CFK-Reste sind alle weg - erstmal neues bestellt)





Die Halterung der Papageienstange ist ein Provisorium. Die Stäbchen bekommen noch Langlöcher, damit man eine Stufenlose Verstellung des Schwerpunktes erreicht.

Edit: 14.01.2013
Am Wochenende habe ich das Gimbal um Roll erweitert und an meinen Okto migriert.
So sieht das Ganze jetzt aus:


...und hier der Vergleich mit dem alten Gimbal:

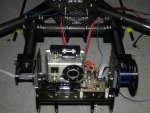
Update 02.02.2013
Erweiterung:
- Verstellbare Halterung der Nick-Achse (Inspiriert von Ertan)
- CAM - Halterung
Da ich immer noch auf die Motoren warte, habe ich ein paar Roxxys geschlachtet, um die Statoren für die Keda zu nutzen.
Nick ist top, Roll etwas zu schwachbrüstig.
So schaut es jetzt aus:
Was noch offen ist:
- gescheite Motoren
Grüße,
Olli
da es ja schon einiges an Hard- und Software gibt hier mal eine Mechanikvariante auf 22mm Rohr-Basis wie ich sie auch an meinem Okto-V8 verwendet habe. Evtl. werde ich das Projekt mit µC-Hardware und Software erweitern, je nachdem, ob in naher Zukunft was brauchbares zu erwerben ist. Bitte zu den Zweitgenannten keine Fragen, ich werde hier posten wenn es was gibt.
Das Gimbal-Projekt von Ertan und die lange Wartezeit auf meine µC war für mich Grund genug mit einem eigenen Gimbal zu beginnen.
Randbedingungen:
Motoren: Bauhöhe bis 30mm, Durchmesser bis 52mm
Gewicht: 500-600gr, je nach Motorenwahl
Verstellbar in X und Y um das "Gleichgewicht" der CAM einzustellen
...estmal sehen was sich ergibt - eben "Happy Engineering"
Mechanik:
Anfänglich habe ich mir Gedanken über die zusätzliche Lagerung des Gimbals gemacht um die Motorenlager zu entlasten.
Dabei bin ich zu diesem Ergebnis gekommen:
Hier sieht man rechts den KDA 20-20L, ein Taumelscheibenlager, ein gefräster Adapter und ein Provisorium Gimbal. Der Adapter hat 3 Aufgaben zu erfüllen: Befestigung am Motor, Aufnahme des Lagers und die Befestigung einer Gimbalaufnahme.
Das Lager mit Adapter sieht dann so aus:
...und alles zusammengebaut:
Nochmal zur Erklärung: Gehalten wird das Ganze am Motor und um das Lager, wie auf den folgenden Bilder zu sehen ist.
Dann habe ich die einzelnen Teile entworfen und gefräst...
Hier das Gimbal mit fertiger Nickachse und Roll-Aufnahme. Der Rollmotor wird genausso wie der Nichmotor befestigt. Das kann sich ja jeder leicht vorstellen
(CFK-Reste sind alle weg - erstmal neues bestellt)
Die Halterung der Papageienstange ist ein Provisorium. Die Stäbchen bekommen noch Langlöcher, damit man eine Stufenlose Verstellung des Schwerpunktes erreicht.
Edit: 14.01.2013
Am Wochenende habe ich das Gimbal um Roll erweitert und an meinen Okto migriert.
So sieht das Ganze jetzt aus:
...und hier der Vergleich mit dem alten Gimbal:
Update 02.02.2013
Erweiterung:
- Verstellbare Halterung der Nick-Achse (Inspiriert von Ertan
)- CAM - Halterung
Da ich immer noch auf die Motoren warte, habe ich ein paar Roxxys geschlachtet, um die Statoren für die Keda zu nutzen.
Nick ist top, Roll etwas zu schwachbrüstig.
So schaut es jetzt aus:
Was noch offen ist:
- gescheite Motoren
Grüße,
Olli
Zuletzt bearbeitet: