Hallo zusammen,
wer kennt es nicht das leidige Thema. "Propeller wuchten".
Als ich mal wieder dabei war einige Propeller auf dem Prop- Balancer auszuwiegen um im Anschluss festzustellen das diese zwar in einer Achse korrekt ausbalanciert sind, jedoch einen Höhenschlag haben oder die Motormitnehmer nicht mittig sitzen und die Auswuchterei eigentlich umsonst war, kam mir die Idee, wie vielen vorher schon, es anders zu versuchen und Motor sowie Propeller in einer Einheit zu wuchten.
Dazu fiel mir zuerst ein möglicher Ansatz ein, welcher aus einer Nanowii sowie der passenden VB.NET Software bestand, welche lediglich die Stärke der durch die Störung hervorgerufene Unwucht misst und diese in einem gemittelten Wert darstellt und diesen mit verherigen Werten gegenüberstellt um einen gutes Balance-verhalten zu erreichen.
Theorie Ansatz 1:
.... OFFSET Wert ermitteln um einen Gyro- Wert nahe 0 heraus zu bekommen
.... Abweichung vom 0 Wert (negativ/ Positiv) ermitteln und daraus einen Mittelwert zu generieren
.... Mittelwert als Zahl darstellen und in eine Tabelle, zu den vorherigen Messergebnissen schreiben
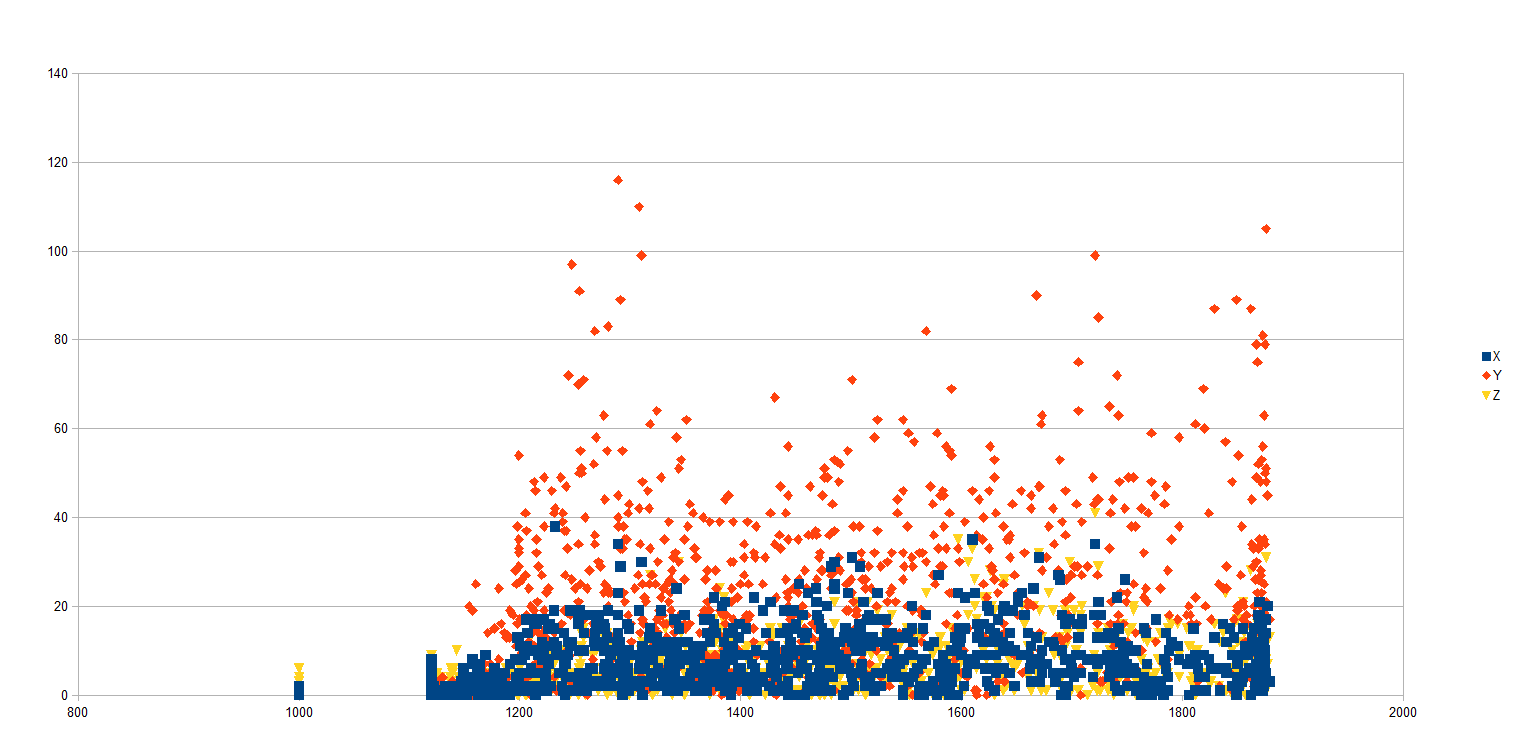
Dabei kam folgendes Resultat heraus, welches sehr genaue Messungen lieferte und das Auswuchten sehr erleichterte:
Es konnte nicht die Position des Übergewichtes ermitteln, jedoch ziemlich genau die Stärke der durch die Unwucht hervorgerufene Störung.
https://www.youtube.com/watch?v=-ZBgUlDQFg8
Nachdem ich 6 Motoren/Propeller damit gewuchtet hatte ging es aufs Flugfeld. Eine derartige Ruhe der Videoaufnahmen kannte ich bis Dato nicht von meinem Copter, obwohl er schon immer relativ ruhige Aufnahmen lieferte.
Ergo ==> zum Auswuchten, wenn auch sehr zeitintensiv ist das gut geeignet.
Hardware im Versuch 1.
- Nanowii mit ...
- MPU6050
Software:
- Arduino, VB.NET
Angestachelt von dem kleinen Wucht- erfolg wollte ich nun auch noch die Position des Übergewichtes an Luftschraube und Motor ermitteln.
Dazu kam ein VNY70 zum Einsatz, welcher nun auch die Position des Motors/ Propellers lieferte und somit die Stärke der Störung auf einen bestimmten Drehwinkel eingrenzen konnte.
https://www.youtube.com/watch?v=oNV57toD69o
Auch dies war nur einer der vielen und wahrscheinlich nicht besten jedoch möglichen Ansätze.
Leider über speicherte ich in diesem Versuch meinen ersten Versuch, der einwandfrei funktionierte, was jetzt kein großes Drama ist, da ich diesen zum Glück neu schreiben kann ;-)
Ansatz 2:
... Anzahl der Messungen je Umdrehung ermitteln
... Position der größten Störung je Umdrehung ermitteln
... Winkel ausgehend vom markierten 0°/360° ermitteln, berechnen und anzeigen
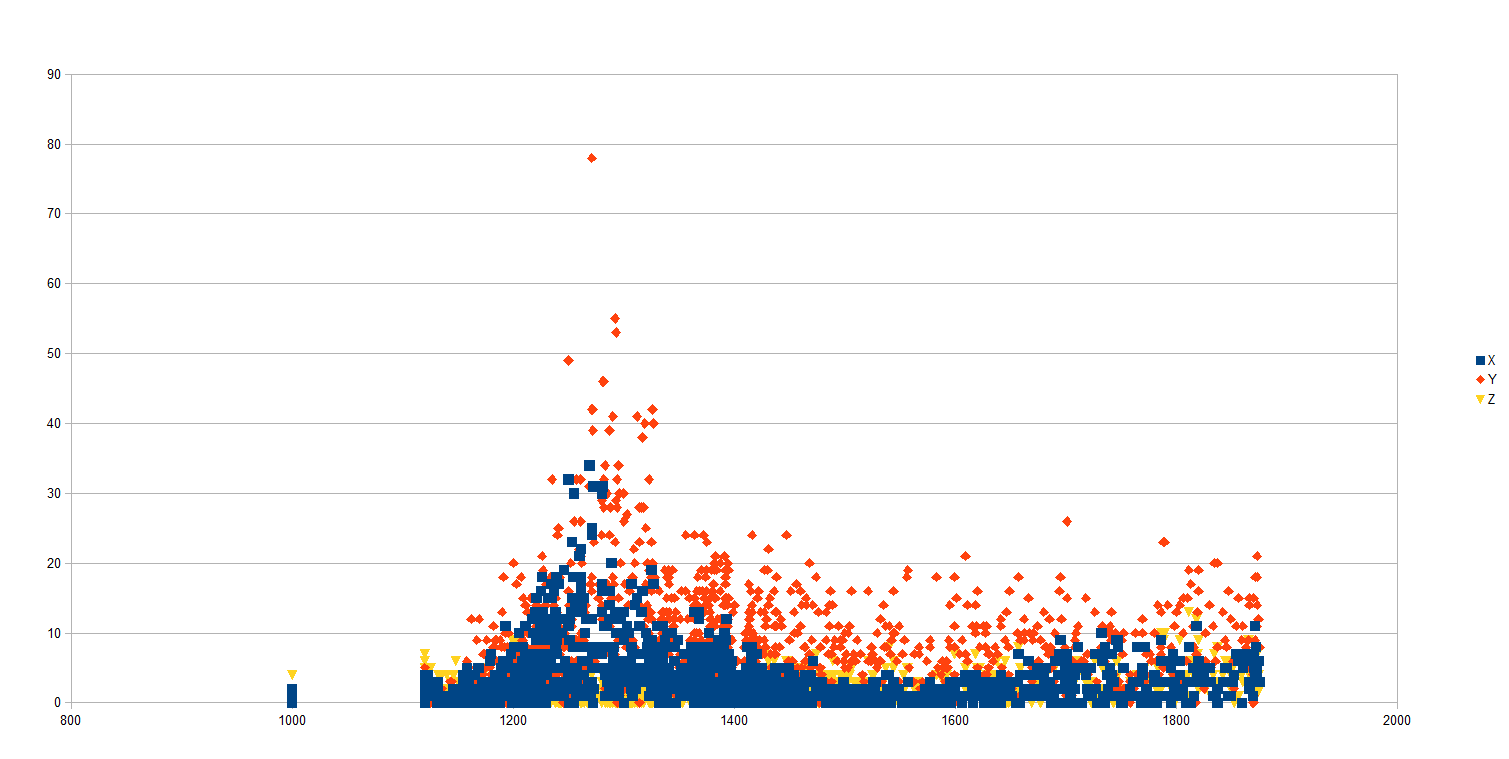
Auch dieser Ansatz funktioniert, jedoch lässt sich damit momentan kein Propeller zu 100% auswuchten, da es an Genauigkeit fehlt. Mit vielen Messwerten steigt die Genauigkeit zwar, sie ist aber lange nicht so genau wie bei meinem ersten Versuch.
Zudem muss man vorher die richtige Position des Sensors sowie die Drehrichtung des Motors herausfinden/einstellen.
PS: im Anhang findet ihr den Arduino- Quelltext von Ansatz-2 -nur schnell herunter- geschrieben und mit ein paar Kommentaren versehen.
Hardware im Versuch 2.
- Nanowii
- VNY70
- ADXL335
Software:
- Arduino
Dieser Thread soll allen mögliche Ansätze aufzeigen und vielleicht eine echte Arbeitserleichterung auf dem Weg zum vibrationsarmen Copter sein.
Wer hat eine Idee - wer macht mit ?
Viele Grüße
Henry
wer kennt es nicht das leidige Thema. "Propeller wuchten".
Als ich mal wieder dabei war einige Propeller auf dem Prop- Balancer auszuwiegen um im Anschluss festzustellen das diese zwar in einer Achse korrekt ausbalanciert sind, jedoch einen Höhenschlag haben oder die Motormitnehmer nicht mittig sitzen und die Auswuchterei eigentlich umsonst war, kam mir die Idee, wie vielen vorher schon, es anders zu versuchen und Motor sowie Propeller in einer Einheit zu wuchten.
Dazu fiel mir zuerst ein möglicher Ansatz ein, welcher aus einer Nanowii sowie der passenden VB.NET Software bestand, welche lediglich die Stärke der durch die Störung hervorgerufene Unwucht misst und diese in einem gemittelten Wert darstellt und diesen mit verherigen Werten gegenüberstellt um einen gutes Balance-verhalten zu erreichen.
Theorie Ansatz 1:
.... OFFSET Wert ermitteln um einen Gyro- Wert nahe 0 heraus zu bekommen
.... Abweichung vom 0 Wert (negativ/ Positiv) ermitteln und daraus einen Mittelwert zu generieren
.... Mittelwert als Zahl darstellen und in eine Tabelle, zu den vorherigen Messergebnissen schreiben
Dabei kam folgendes Resultat heraus, welches sehr genaue Messungen lieferte und das Auswuchten sehr erleichterte:
Es konnte nicht die Position des Übergewichtes ermitteln, jedoch ziemlich genau die Stärke der durch die Unwucht hervorgerufene Störung.
https://www.youtube.com/watch?v=-ZBgUlDQFg8
Nachdem ich 6 Motoren/Propeller damit gewuchtet hatte ging es aufs Flugfeld. Eine derartige Ruhe der Videoaufnahmen kannte ich bis Dato nicht von meinem Copter, obwohl er schon immer relativ ruhige Aufnahmen lieferte.
Ergo ==> zum Auswuchten, wenn auch sehr zeitintensiv ist das gut geeignet.
Hardware im Versuch 1.
- Nanowii mit ...
- MPU6050
Software:
- Arduino, VB.NET
Angestachelt von dem kleinen Wucht- erfolg wollte ich nun auch noch die Position des Übergewichtes an Luftschraube und Motor ermitteln.
Dazu kam ein VNY70 zum Einsatz, welcher nun auch die Position des Motors/ Propellers lieferte und somit die Stärke der Störung auf einen bestimmten Drehwinkel eingrenzen konnte.
https://www.youtube.com/watch?v=oNV57toD69o
Auch dies war nur einer der vielen und wahrscheinlich nicht besten jedoch möglichen Ansätze.
Leider über speicherte ich in diesem Versuch meinen ersten Versuch, der einwandfrei funktionierte, was jetzt kein großes Drama ist, da ich diesen zum Glück neu schreiben kann ;-)
Ansatz 2:
... Anzahl der Messungen je Umdrehung ermitteln
... Position der größten Störung je Umdrehung ermitteln
... Winkel ausgehend vom markierten 0°/360° ermitteln, berechnen und anzeigen
Auch dieser Ansatz funktioniert, jedoch lässt sich damit momentan kein Propeller zu 100% auswuchten, da es an Genauigkeit fehlt. Mit vielen Messwerten steigt die Genauigkeit zwar, sie ist aber lange nicht so genau wie bei meinem ersten Versuch.
Zudem muss man vorher die richtige Position des Sensors sowie die Drehrichtung des Motors herausfinden/einstellen.
PS: im Anhang findet ihr den Arduino- Quelltext von Ansatz-2 -nur schnell herunter- geschrieben und mit ein paar Kommentaren versehen.
Hardware im Versuch 2.
- Nanowii
- VNY70
- ADXL335
Software:
- Arduino
Dieser Thread soll allen mögliche Ansätze aufzeigen und vielleicht eine echte Arbeitserleichterung auf dem Weg zum vibrationsarmen Copter sein.
Wer hat eine Idee - wer macht mit ?
Viele Grüße
Henry
Anhänge
-
1,4 KB Aufrufe: 133
-
 1,2 MB Aufrufe: 139
1,2 MB Aufrufe: 139
") Alternativ ein Absolut-encoder am Motor.
Alternativ ein Absolut-encoder am Motor.