Nachdem ich mich ausführlich mit dem originalen FrSky-Variometer FVAS-02H beschäftigt habe,
wende ich mich dem opensource-Variometer zu.
https://code.google.com/p/openxvario/
In diesem Thema sollen Informationen, Erfahrungen und Modifikationen von Hard- und Software
über den Sensor openxvario bzw. openxsensor gebündelt werden. (Vornehmlich in deutscher Sprache.)

Es gibt einen wesentlichen Vorteil: Als opensource-Projekt ist die Soft- und Hardware vollkommen offengelegt und für Veränderungen und Optimierungen dokumentiert. Im Gegensatz zum FVAS-02H von FrSky funktioniert die Variometersoftware von Anfang an und es ist kein Geheimnis, was die Software macht. Die Software-Routinen für die Gewinnung des Variometersignals sind in der openxsensor-Version durch die opensource-Gemeinde besser und schneller optimiert worden.
Beachte:
openxvario und openxsensor haben zunächst die gleiche Hardware.
Der Unterschied liegt hauptsächlich in der Software. Der openxsensor lässt das Herz der Sensor- und Telemetriebegeisterten höherschlagen und löst das ursprüngliche openxvario ab.
https://code.google.com/p/openxvario/source/browse/#svn/branches/openxsensor
Geräteangaben:
Abmessungen, Gewicht und Preis gleichen dem Frsky-Variometer FVAS-02H
http://fpv-community.de/showthread....meter-FVAS-02H&p=485967&viewfull=1#post485967
Abmessungen: 33mm x 18mm x 6mm (L x B x H)
Masse: ca. 3g
Drucksensor: MEAS5611 (10cm Druckhöhenauflösung)
Mikrokontroller: Atmega328
Sensorbus: 57600 Baud;Half Duplex;(Herstellerbezeichnung "Smart Port"); Protokoll siehe da:
http://fpv-community.de/showthread....meter-FVAS-02H&p=497104 viewfull=1#post497104
Taranis-Einstellungen:
Siehe aktuelles deutsches Handbuch zur Taranis
http://openrcforums.com/forum/viewtopic.php?f=92&t=3563&p=80732#p80732
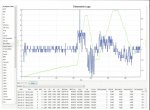
Datenaufzeichnungsrate : Einstellbar in 0.1-Sekundenschritten von 0.1s bis 25.5s .
Einstellung des Vario-Tongenerators: Taranis-menu "Grundeinstellungen 1/8" und "Telemetrie 12/12"
wende ich mich dem opensource-Variometer zu.
https://code.google.com/p/openxvario/
In diesem Thema sollen Informationen, Erfahrungen und Modifikationen von Hard- und Software
über den Sensor openxvario bzw. openxsensor gebündelt werden. (Vornehmlich in deutscher Sprache.)
Es gibt einen wesentlichen Vorteil: Als opensource-Projekt ist die Soft- und Hardware vollkommen offengelegt und für Veränderungen und Optimierungen dokumentiert. Im Gegensatz zum FVAS-02H von FrSky funktioniert die Variometersoftware von Anfang an und es ist kein Geheimnis, was die Software macht. Die Software-Routinen für die Gewinnung des Variometersignals sind in der openxsensor-Version durch die opensource-Gemeinde besser und schneller optimiert worden.
Beachte:
openxvario und openxsensor haben zunächst die gleiche Hardware.
Der Unterschied liegt hauptsächlich in der Software. Der openxsensor lässt das Herz der Sensor- und Telemetriebegeisterten höherschlagen und löst das ursprüngliche openxvario ab.
https://code.google.com/p/openxvario/source/browse/#svn/branches/openxsensor
Geräteangaben:
Abmessungen, Gewicht und Preis gleichen dem Frsky-Variometer FVAS-02H
http://fpv-community.de/showthread....meter-FVAS-02H&p=485967&viewfull=1#post485967
Abmessungen: 33mm x 18mm x 6mm (L x B x H)
Masse: ca. 3g
Drucksensor: MEAS5611 (10cm Druckhöhenauflösung)
Mikrokontroller: Atmega328
Sensorbus: 57600 Baud;Half Duplex;(Herstellerbezeichnung "Smart Port"); Protokoll siehe da:
http://fpv-community.de/showthread....meter-FVAS-02H&p=497104 viewfull=1#post497104
Taranis-Einstellungen:
Siehe aktuelles deutsches Handbuch zur Taranis
http://openrcforums.com/forum/viewtopic.php?f=92&t=3563&p=80732#p80732
Datenaufzeichnungsrate : Einstellbar in 0.1-Sekundenschritten von 0.1s bis 25.5s .
Einstellung des Vario-Tongenerators: Taranis-menu "Grundeinstellungen 1/8" und "Telemetrie 12/12"
Zuletzt bearbeitet: