Hallo zusammen,
lese hier schon schon einige Zeit interessiert mit und schreibe auch mal hier und da einen Beitrag. Jetzt dachte ich mir, wenn Interesse besteht, lasse ich euch doch mal an meinem neuesten Projekt teilhaben.
Zur Vorgeschichte: Plane Ende Juni für 2 Wochen Urlaub bei Freunden in Irland zu machen und möchte natürlich dort auch ein bisschen Fliegen/Filmen. Meine Kopter, die eine Kamera tragen können sind alle recht groß / sperrig, sodass ich sie nicht ohne viel Aufwand "handgepäcktauglich" zerlegen kann.
Warum nicht einfach einen fertigen Rahmen z.B. den von Tarot kaufen? - Naja dafür gibt es mehrere Gründe, zum einen macht selber konstruieren und das ganze dann aufbauen mehr Spaß, zum anderen ist es ein Herausvorderung. Außerdem hat man etwas Eigenes, das das man in keinem Laden kaufen kann.
Was mir wichtig ist:
- Hexakopter (zwecks Redundanz)
- max. 3kg Abfluggewicht (inkl. GoPro und Gimbal)
- lange Flugzeiten (mit GoPro samt Gimbal und FPV mind. 15 min.)
- gut zu transportieren (klappbar)
- Akkus 3S 5000mAh (habe davon schon jede Menge)
Die Elektronik:
- Flightcontrol: Naza + GPS (noch in der Schublade)
- HK F30A mit WiiESC (noch in der Schublade)
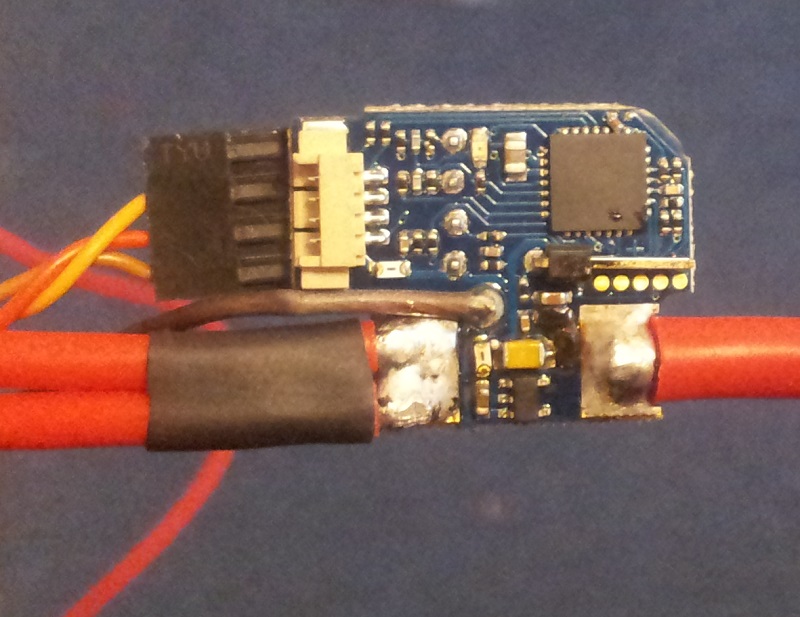
- Unisense-E von SM Modellbau für Telemetrie
- Jeti RSat2 (SumSi - Empfänger)
- AlexMos - Controller fürs Gimbal
- 10mW 5G8 Videotransmitter
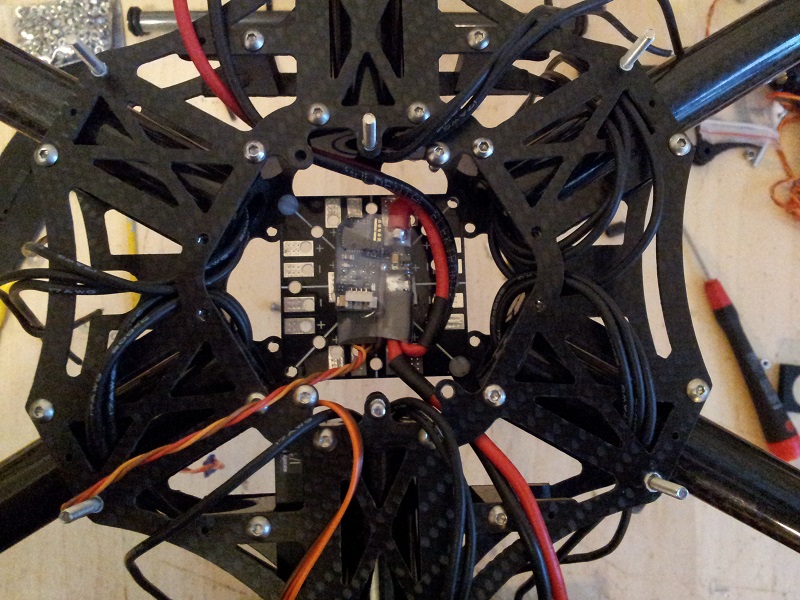
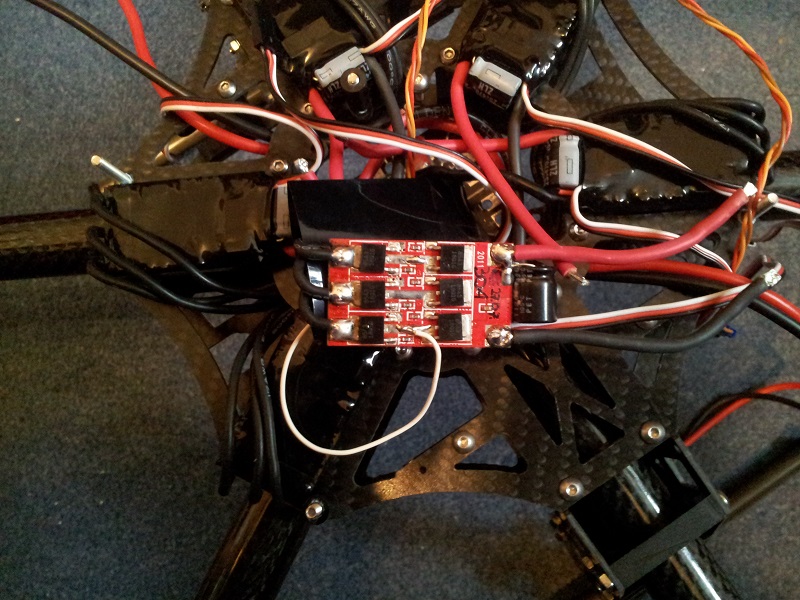
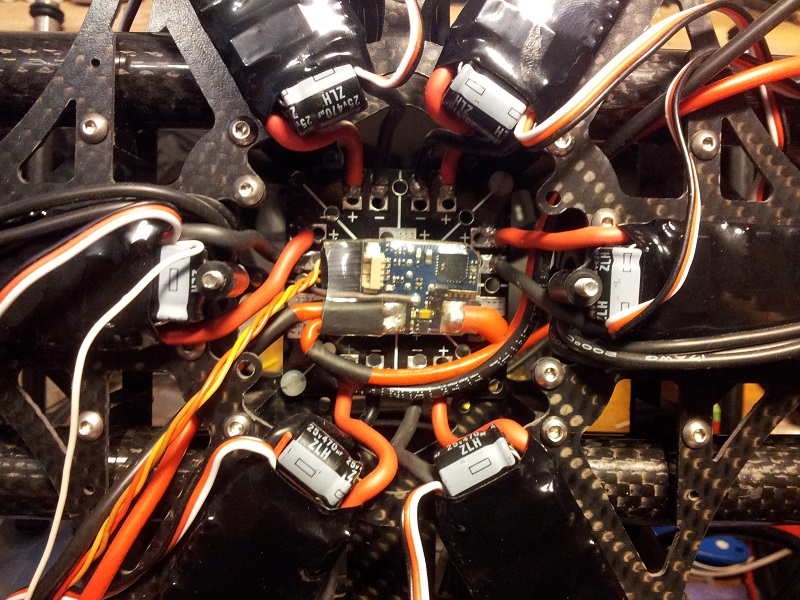
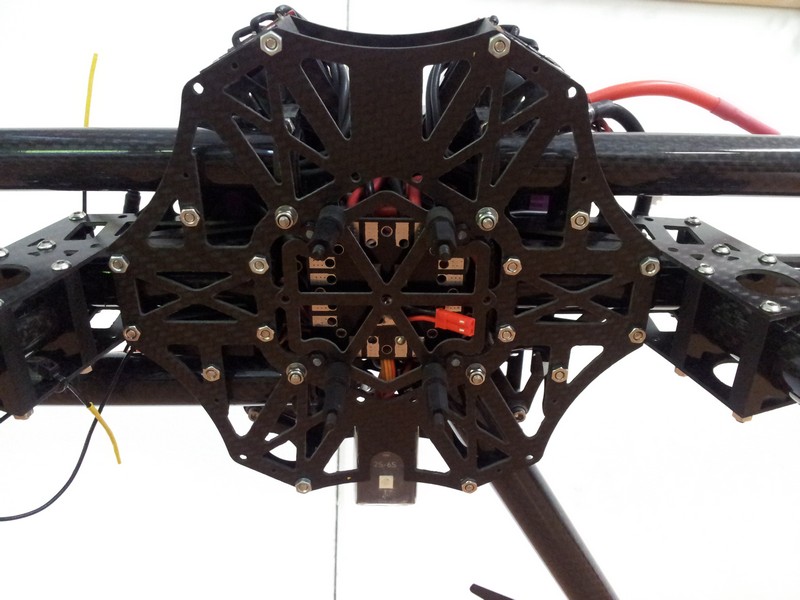
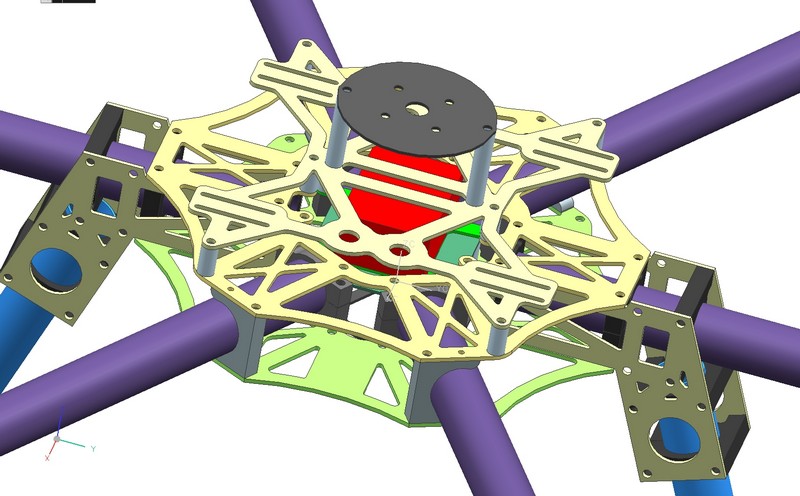
Zusammen mit einem Arbeitskolegen (der ist am CAD wesentlich fitter als ich ) habe ich mich dann mal vor den Computer geklemmt und nach und nach ist dann ein doch recht ansehnlicher Kopter entstanden. Die FC wird direkt in der Mitte montiert (rotes Kästchen), somit ist sie optimal im Schwerpunkt.
) habe ich mich dann mal vor den Computer geklemmt und nach und nach ist dann ein doch recht ansehnlicher Kopter entstanden. Die FC wird direkt in der Mitte montiert (rotes Kästchen), somit ist sie optimal im Schwerpunkt.
Es wird zwar alles sehr eng, sodass man alles sehr ordentlich verkabeln muss, aber dafür bleibt der Kopter schön kompakt.
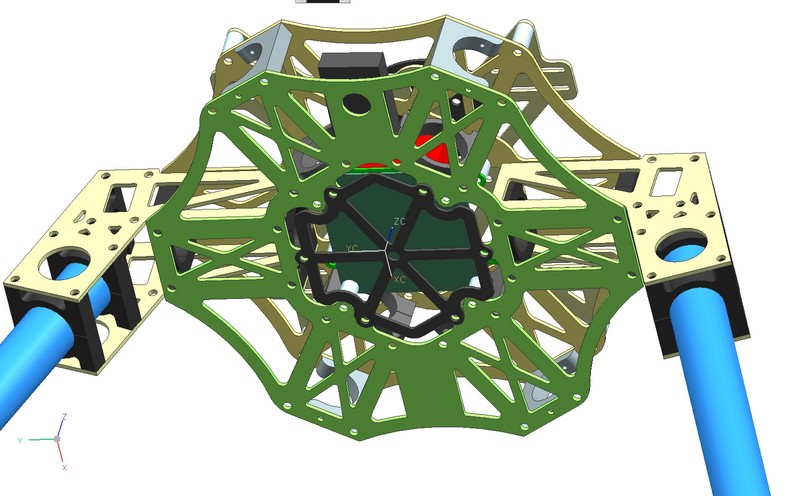
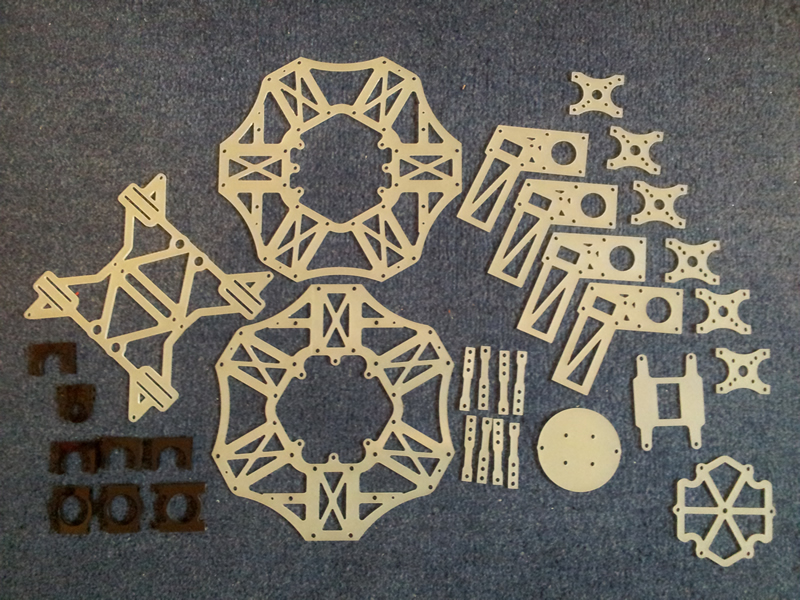
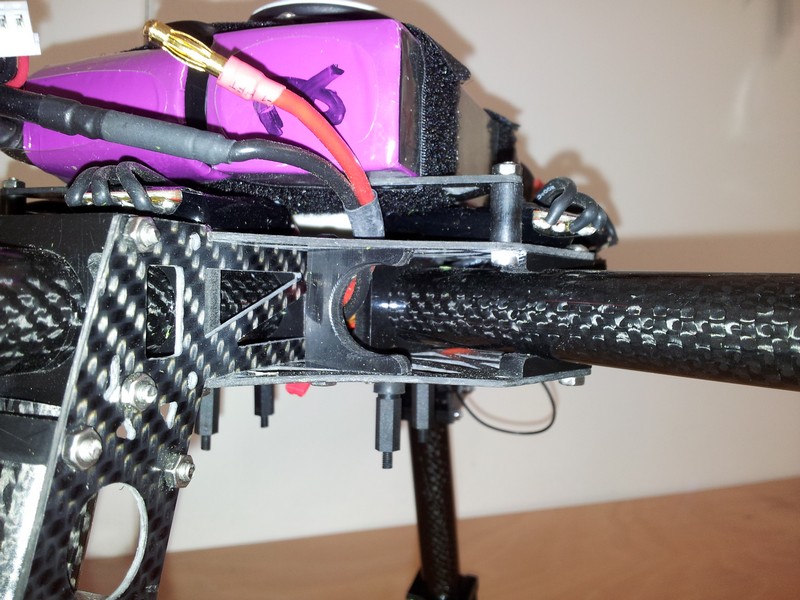
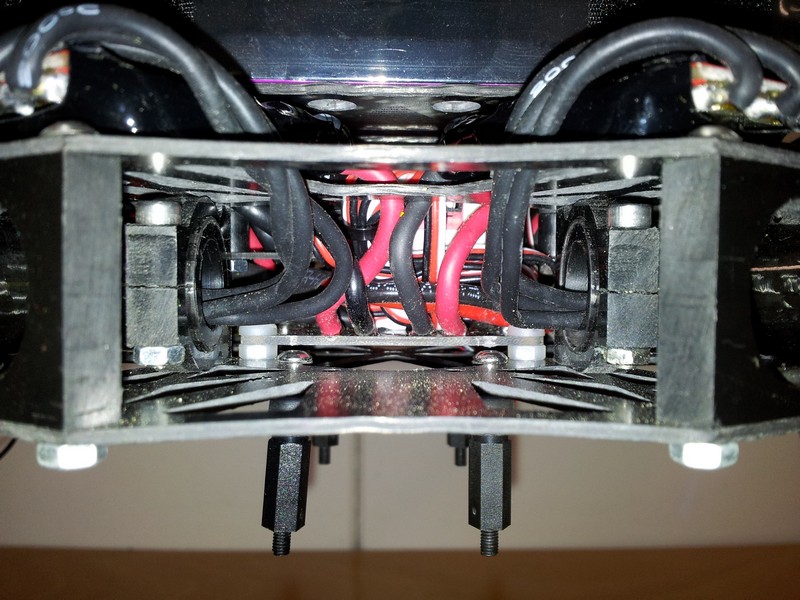
Wie man sieht wurde viel Wert auf Leichtbau gelegt. Als Material möchte ich 1,5mm starkes CFK verwenden, die Schellen werde ich aus POM fräsen. Für die Ausleger verwende ich CFK-Rohre mit 19mm Außendurchmesser und 0,5mm Wandstärke.
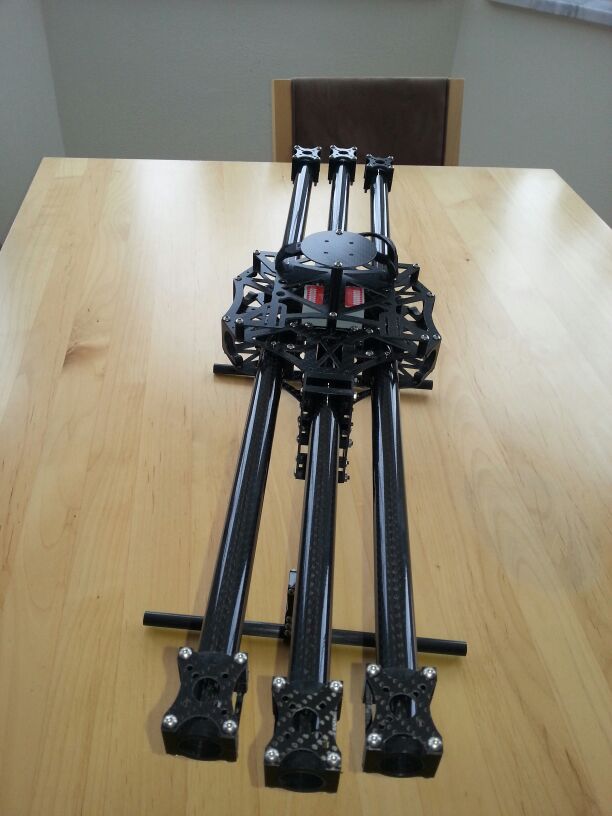
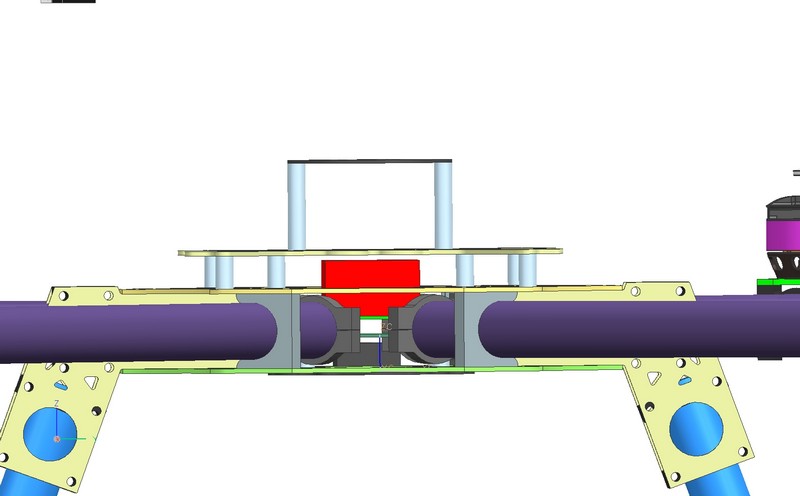
Das Ladegestell wurde auch gleich mit integriert, auch hier verwende ich 19mm Rohre.
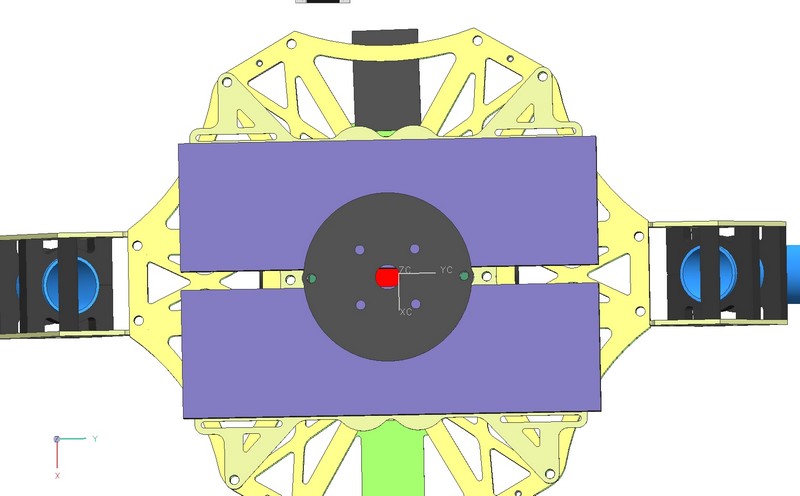
Es ist Platz für 2 Akkuspacks vorgesehen, die mit Klettgurten befestigt werden und als 3S2P verschaltet werden (3S 10Ah). Darüber das GPS auf einer abschirmenden CFK-Platte.
Den Klappmechanismus kann man schon ganz gut erkennen, die jeweils vorderen und hinteren beiden Ausleger werden zur Seite weggeklappt und durch Klemmschellen auf ihrer Position gehalten.
Weiter geht´s in Kürze...
lese hier schon schon einige Zeit interessiert mit und schreibe auch mal hier und da einen Beitrag. Jetzt dachte ich mir, wenn Interesse besteht, lasse ich euch doch mal an meinem neuesten Projekt teilhaben.
Zur Vorgeschichte: Plane Ende Juni für 2 Wochen Urlaub bei Freunden in Irland zu machen und möchte natürlich dort auch ein bisschen Fliegen/Filmen. Meine Kopter, die eine Kamera tragen können sind alle recht groß / sperrig, sodass ich sie nicht ohne viel Aufwand "handgepäcktauglich" zerlegen kann.
Warum nicht einfach einen fertigen Rahmen z.B. den von Tarot kaufen? - Naja dafür gibt es mehrere Gründe, zum einen macht selber konstruieren und das ganze dann aufbauen mehr Spaß, zum anderen ist es ein Herausvorderung. Außerdem hat man etwas Eigenes, das das man in keinem Laden kaufen kann.
Was mir wichtig ist:
- Hexakopter (zwecks Redundanz)
- max. 3kg Abfluggewicht (inkl. GoPro und Gimbal)
- lange Flugzeiten (mit GoPro samt Gimbal und FPV mind. 15 min.)
- gut zu transportieren (klappbar)
- Akkus 3S 5000mAh (habe davon schon jede Menge)
Die Elektronik:
- Flightcontrol: Naza + GPS (noch in der Schublade)
- HK F30A mit WiiESC (noch in der Schublade)
- Unisense-E von SM Modellbau für Telemetrie
- Jeti RSat2 (SumSi - Empfänger)
- AlexMos - Controller fürs Gimbal
- 10mW 5G8 Videotransmitter
Zusammen mit einem Arbeitskolegen (der ist am CAD wesentlich fitter als ich
) habe ich mich dann mal vor den Computer geklemmt und nach und nach ist dann ein doch recht ansehnlicher Kopter entstanden. Die FC wird direkt in der Mitte montiert (rotes Kästchen), somit ist sie optimal im Schwerpunkt.Es wird zwar alles sehr eng, sodass man alles sehr ordentlich verkabeln muss, aber dafür bleibt der Kopter schön kompakt.
Wie man sieht wurde viel Wert auf Leichtbau gelegt. Als Material möchte ich 1,5mm starkes CFK verwenden, die Schellen werde ich aus POM fräsen. Für die Ausleger verwende ich CFK-Rohre mit 19mm Außendurchmesser und 0,5mm Wandstärke.
Das Ladegestell wurde auch gleich mit integriert, auch hier verwende ich 19mm Rohre.
Es ist Platz für 2 Akkuspacks vorgesehen, die mit Klettgurten befestigt werden und als 3S2P verschaltet werden (3S 10Ah). Darüber das GPS auf einer abschirmenden CFK-Platte.
Den Klappmechanismus kann man schon ganz gut erkennen, die jeweils vorderen und hinteren beiden Ausleger werden zur Seite weggeklappt und durch Klemmschellen auf ihrer Position gehalten.
Weiter geht´s in Kürze...