
Hallo!
Mein Belt CPX verhält sich um die YAW Achse sehr sprunghaft.
Die Flash LOGs zeigen das sehr anschaulich. Pitch und Roll sind soweit ok.
Hier ein ScreenShot:
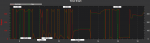
Was mich völlig irritiert ist die Tasache, dass schon das DesYaw Signal so springt.
Nach meine Verständnis ist das doch das Signal, was direkt von der Funke kommt oder wird das schon vom APM irgendwie berechnet??
Wenn DesYaw das Signal von der Funke ist, müsste ich den fehler auf der Strecke Sender - Empfänger - Kabel zum APM suchen. Richtig?
Weiterhin meldet die Auto Analyse der Flash LOGs immer einen zu niedrigen Vcc Wert. Könnte das auch eine Ursache sein?
Test: VCC = FAIL - VCC below minimum of 4.6v (4.282v)
Bin mal gespannt, was ihr dazu sagt!
MfG Baffo
Mein Belt CPX verhält sich um die YAW Achse sehr sprunghaft.
Die Flash LOGs zeigen das sehr anschaulich. Pitch und Roll sind soweit ok.
Hier ein ScreenShot:
Was mich völlig irritiert ist die Tasache, dass schon das DesYaw Signal so springt.
Nach meine Verständnis ist das doch das Signal, was direkt von der Funke kommt oder wird das schon vom APM irgendwie berechnet??
Wenn DesYaw das Signal von der Funke ist, müsste ich den fehler auf der Strecke Sender - Empfänger - Kabel zum APM suchen. Richtig?
Weiterhin meldet die Auto Analyse der Flash LOGs immer einen zu niedrigen Vcc Wert. Könnte das auch eine Ursache sein?
Test: VCC = FAIL - VCC below minimum of 4.6v (4.282v)
Bin mal gespannt, was ihr dazu sagt!
MfG Baffo

