
Hallo,
anbei ein kleiner Baubericht zu meinem ersten Autoquad-Projekt auf Basis eines M4V2.
Im Grunde erst mal nichts besonderes, denn auf Basis des Ladybirds gibt es diverse Minicopter mit M4V2:
http://autoquad.org/wiki/wiki/building-developing/autoquad-reference-builds/m4-ladybird-v2/
Ich bin einen etwas anderen Weg gegangen und wollte stärkere Motoren und bessere Lipos verbauen.
Vielleicht kann ich den einen oder anderen dazu begeistern, sich auch an Autoquad heranzuwagen, denn inzwischen ist es mit dem M4 nicht nur sehr bezahlbar geworden, sondern es ist wirklich extrem genial, dass man mit einem Copter mit nur ca. 70 Gramm Wegpunktfliegen kann und das bei der bequemen Eingabe über ein Android-Handy mittels App und Übermittlung via bluetooth.
Leider spielt sich derzeit noch das meiste im englischen Autoquadforum ab. Aufgrund der anfangs etwas schwierigen Materie schreckt dies vielleicht den einen oder anderen ab. Inzwischen tummeln sich ein paar hier im deutschen Ableger und man bekommt Fragen auch in Deutsch beantwortet;
http://fpv-community.de/forumdisplay.php?48-AutoQuad
Das "magische Auge" meines Minis ist die M4V2, die wirklich sehr klein ist und dennoch alles erforderliche inklusive eines Empfängers (Spektrum, andere möglich) enthält:


Als Rahmen habe ich einen Acrylrahmen vom Micro-Motor-Warehouse gewählt, den es heute nicht mehr gibt. Inzwischen sind diese aus einem Stück gefertigt:
http://micro-motor-warehouse.com/collections/frames
Mein Rahmen hat gedruckte weiße Motorhalterungen für 8mm brushed-Motoren, die erstaunlich stabil sind:

Die FC darauf zu befestigen, war ein wenig kniffelig. Die Lochabstände passen nicht und die M4V2 hat nur M2 Löcher! Solche Distanzbolzen sind schwer zu kriegen, aber ich wurde hier fündig:
http://www.ebay.de/itm/10-Stuck-Abs...28?pt=LH_DefaultDomain_77&hash=item2ed727bd54
Da sie mir mit 10mm zu hoch waren, wurden sie halbiert. Ferner war problematisch, dass sogar diese kleinen Distanzbolzen zu breit sind und an die Bauteile stoßen. Daher habe ich oben auf die Distanzbolzen noch mal M2-Kunststoffmuttern geklebt, wie auf dem Bild zu erkennen. Keinesfalls dürfen die Löcher auf M2,5 aufgebohrt werden. Dann ist die FC defekt!
Schraubt man die Distanzbolzer erst mal an die FC, dann sieht das so aus:


So lässt es sich dann auch gut mit jeweils einem kleinen Tropfen 5-Minuten-Epoxydharz auf den vorher angerauten Acrylrahmen kleben:

Nachdem nun die Abstandsbolzen angeklebt wurden, kamen die Motorhalterungen an die Reihe. Die passenden Motoren habe ich auch aus dem Micro-Motor-Warehouse bezogen. Es sind 8,5er Motoren und damit stärker als die üblichen Hubsan-/Ladybird-Motoren:
http://micro-motor-warehouse.com/collections/all/products/cl-0820-15

Ich habe mich auf die Angabe verlassen, die bei Benedikt auf der Seite steht: Maximal 40g Schub. Im Augenblick kann ich das so nicht bestätigen. Da ich es immer genau wissen will, habe ich dafür einen kleinen Motorteststand gebaut:

Benedikt hat mir empfohlen, anstatt der Hubsan-Propeller, die Propeller vom Parrot Rolling Spider zu verwenden. Diese sind etwas größer:


Auf meinem Motorteststand konnte ich leider nur einen geringen Unterschied zwischen den Propellern feststellen. Auch erreichte der 8,5er Motor mit den größeren Propellern nur 30g Schub. Zugegeben, mein Motorteststand hat auch Schwächen. Bei Gelegenheit werde ich mal versuchen, den Schub des gesamten Copters zu messen.
Auch der größere Propeller vom Rolling Spider passt noch gut auf den Rahmen:

Leider mussten fast alle Motorkabel verlängert werden. Dafür konnte ich sie dann gleich so lang machen, dass sie unter der FC verlegt werden können. Ferner wurde das Baro des M4V2 mit dichtem Schaumstoff abgedeckt:

Zwischendurch mal ein Größenvergleich mit einem Cheerson CX-10, wobei die M4 bei wenig mehr Größe deutlich mehr Technik enthält:

Ende Teil 1. Weiter gehts im Teil 2 mit dem Lipo
------------------------------------------------------------------------------------------
2. Teil - LiPo
Die ursprünglich für Copter wie Ladybird und Hubsan vorgesehenen LiPos mit 370/380 mAh sind tatsächlich etwas schwach auf der Brust, sowohl die C-Rate als auch die verfügbare Kapazität. Da ich nun die stärkeren 8,5er Motoren verwende und der Copter auch einiges mehr wiegen wird, als z.B. ein Hubsan, muss ein stärkerer LiPo her. Also warum nicht einfach einen basteln.
Gekauft habe ich von Hobbyking den
Rhino 610mAh 2S 7.4v 20C Lipoly Pack (EU Warehouse)
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=50122

Da es sich um ein 2S handelt, wurde vorsichtig die Hülle entfernt und aus einem 2S zwei 1S LiPos erstellt:


Mehr zum Test hattee ich noch folgenden LiPo mitbestellt:
Turnigy nano-tech 600mah 1S 35~70C Lipo (Nine Eagles Solo Pro 328, Eflite MQX, 120SR) (EU Warehouse)
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=32782
.jpg)
Im nachhinein muss ich sagen, dass der fertige nano-tech 600mAh die bessere Wahl ist. Gefühlt hält er länger die Spannung und gibt mehr Kapazität ab. Mit einem Preis von 3,22 Euro zu 2 Euro (4,06 Euro für den 2S gesamt) lohnt sich der Aufwand des Selbstbastelns sowieso nicht, zumal noch ein Anschlusskabel für die 2. Zelle benötigt wird.
Der LiPo wird mit einem Stück Klett-Klebeband beidseitig befestigt. Zusätzlich umschließt ein dünnes doppelseitiges Band den LiPo und fixiert ihn fest von unten am Rahmen.
Ende Teil 2 - weiter gehts im Teil 3 mit dem Einrichten des M4 zum Erstflug
---------------------------------------------------------------------------------------
Teil 3 - letzte Arbeiten, Einrichten der AutoQuad-Firmware - Erstflug
Nachdem die Motorkabel entsprechend verlängert und fixiert worden waren (die Motorbuchsen auf der FC eingelötet wurden) und ein Gegenstück zum Akkukabel an der FC festgelötet worden ist, fehlte nur noch das Aufspielen der aktuellen Firmware.
Autoquad kann mit Quatos oder PIDS eingestellt werden:
Quatos
Für kleine Copter (ich glaube bis 1,5 kg) liegt beim M4 eine Lizenz zur Nutzung von Quatos anbei. Bei größeren Copter ist eine Lizenzgebühr zu zahlen. Aber wofür ist Quatos? Vereinfacht gesagt, muss mit recht hohem Aufwand jede einzelne Masse gewogen und die genaue Position zum Mittelpunkt des Copters vermessen und anschließend eingegeben werden. Wenn man das für alle Teile des Copters macht, ergibt sich daraus wohl ein besonders gutes Regelverhalten. Mag sein, dass ich dazu noch keinen perfekt eingestellten Copter live gesehen habe, aber die Videos dazu überzeugen mich nicht. Für mich ist das ein Rückschritt. In Zeiten, in denen DJI mit wenigen PID-Werten einen Copter genial fliegen lässt, stellt sich für mich die Frage, was das ganze soll? Man kann aus allem eine Wissenschaft machen - oder ein Wissenschaftler programmiert es so genial, dass man es einfach nutzen kann. Jedem das seine.
PIDS
Man kann anstatt Quatos auch einfach die gewohnten PIDS nutzen, allerdings musste ich auch hier feststellen, dass die Autoquadwelt bei diesen Werten auch etwas anders tickt. Die Logik habe ich noch nicht durchblickt. Eine wirklich gute Dokumentation habe ich dazu auch noch nicht gesehen. ABER: Es gibt für Autoquad sog. Referenzbauten:
http://autoquad.org/wiki/wiki/building-developing/autoquad-reference-builds/
Für den Ladybird oder ähnliche Copter gibt es dazu ein ein Referenzfile mit allen Einstellungswerten, welches nach dem Einspielen der Firmware einfach geladen werden kann:
http://autoquad.org/wiki/wiki/build...reference-builds/m4-lb-size-3d-printed-parts/
Die passende Firmware gibt es hier:
http://autoquad.org/software-downloads/firmware-download-wizard/
Vorab ist natürlich noch die Ground Control Station zu installieren:
http://autoquad.org/software-downloads/?category=2
Stressig wird es, weil noch Treiber zu installieren sind, damit der Anschluss über USB funktioniert und die Firmware gebrannt werden kann. Den Ablauf findet man hier:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-installation-setup/
Wenn nach der Installation aller Treiber etc. das flashen nicht klappt, einfach mal den USB-Port wechseln. Diesen Tip habe ich im englischen Autoquadforum gelesen. Genau erklären kann ich es nicht. Vermutlich habe ich genau einen USB3-Anschluss am Laptop und genau der funktioniert.
Eine Besonderheit gab es bei mir. Obwohl ich dachte, ich hätte die Laufrichtung der Motoren korrekt montiert und entsprechend der Vorgaben die Motoren eingebaut, war es leider genau verkehrt herum. Aber das ist kein Beinbruch und lässt sich bei Autoquad schnell ändern:
http://autoquad.org/wiki/wiki/configuring-autoquad-flightcontroller/frame-motor-mixing-table/
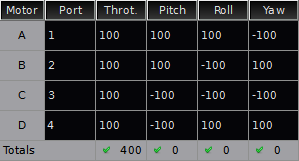
Einfach alle Vorzeichen bei Roll und Pitch umdrehen und die Drehrichtung jedes Motors ist in der Firmware umgedreht worden.
Und der Empfänger?
Der ist schon integriert und kann mit einer Spektrumfunke gebunden werden. Dazu muss eine Lötbrücke geschlossen werden und in der Groundcontrol sind wie gewohnt die Kanäle den einzelnen Funktionen zuzuordnen:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-radio-options/
Ferner muss bei Nutzung des internen Empfängers noch eine Antenne angebracht werden. Dafür kann man z.B. eine Graupner 2,4 Ghz Ersatzantenne für einen GR-16 kaufen. Der Stecker passt.
Ein bißchen Kalibrieren muss noch sein. Mein Erstflug habe ich zwar ohne gemacht, sollte aber doch vorher durchgeführt werden.
1. Einfache onboard DIMU Kalibrierung
Über die Fernsteuerung mittels Stickeingabe wird die horizontale und vertikale Kalibrierung durchgeführt. Sehr einfach und hier gut dargestellt:
http://autoquad.org/wiki/wiki/confi...utoquad-calibrations/onboard-imu-calibration/
2. Kompasskalibrierung
Ebenfalls durch Stickeingabe an der Fernsteuerung einzuleiten, jedoch durch weitere Stickeingabe abzuspeichern, hier zu sehen:
http://autoquad.org/wiki/wiki/confi...utoquad-calibrations/onboard-imu-calibration/
Aber: Die Beschreibung ist ein wenig kurz gehalten. Durch die Stickeingabe wird die Kompasskalibierung gestartet. Drei LED´s blinken schnell. Nun bewegt man das Board mehrfach in jeder Achsrichtung (X, Y, Z). Dabei werden die LED´s immer langsamer, bis sie dann irgendwann alle erloschen sind und wieder so leuchten, wie vor der Einleitung der Kompasskalibierung. Anschließend duch eine andere Stickeingabe die Kalibrierung speichern. Wenn eine Bluetoothverbindung besteht, können die Vorgänge auch über die Groundcontrol eingeleitet werden.
Und dann kann es losgehen. Damit man noch weiß, was die ganzen blinkenden LED´s bedeuten, sollte man noch folgende Seite verinnerlichen:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-operations-functions/
Hier der Erstflug. Sieht nur deshalb zappelig aus, weil ich die Reaktionen testen wollte. Flog nicht schlecht, allerdings waren die Reaktionen auf die Steuerbefehle sehr träge:
https://vimeo.com/124457409
P.S.: Der Flug war mit Standardwerten in den PIDS. Dann hängt er allerdings sehr träge an den Sticks. Ich empfehle, CTRL_TLT_ANG_D von 8400 auf 5400 zu reduzieren!
Ende Teil 3 - weiter geht es mit Teil 4 - Erweiterungsboard und Bluetoothmodul
------------------------------------------------------------------------
Teil 4 - Expansionboard und Bluetoothmodul - Auswahl und Anschluss
Für das M4 gibt es inzwischen eine Vielzahl von Erweiterungsboards. Diese werden benötigt, um auf der wirklich sehr kleinen FC nicht vorhandene Funktionen zu erhalten, wie z.B. die Aufzeichnung der Telemetriedaten auf einer SD-Karte oder den Anschluss eines Bluetoothmoduls oder den Anschluss von Reglern, um Brushlessmotoren zu betreiben (interne Regler für die Brushedmotoren sind ja vorhanden). Das Bluetoothmodul erlaubt es dann, auf freiem Feld mittels Androidhandy (oder Laptop mit bluetooth) und Autoquadapp vor Ort, Wegpunkte einzugeben oder Livedaten zu sehen und zu hören!
Die Erweiterungsboards werden über die mittigen Stecksockel mit insgesamt 20 Kontakten angeschlossen:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-expansion-options/
Ich habe mir das Kisssys Expansion Board mitbestellt:

Siehe hier: http://autoquad.org/wiki/wiki/m4-microcontroller/m4-expansion-options/kisssys-expansion-board-2/
Das Kisssysboard hat einen Steckplatz für eine Mikro-SD-Karte, einen Steckeranschluss für ein Bluetoothmodul sowie 4 Konkakte zum Anschluss von ESC für Brushedmotoren. Das Kisssysboard hat den Vorteil, dass es sehr klein und leicht ist und ist daher für meine Zwecke gut geeignet. Allerdings habe ich inzwischen den Eindruck, dass es eine extreme HF-Schleuder ist. Zumindes ist der GPS-Emfpang ohne dieses Board besser. Leider habe ich kein Messgerät, um dies in Werten darzustellen. Das Kisssysboard gibt es fertig oder zu selber löten. Letzteres kann ich nicht empfehlen, wenn man keine Möglichkeit hat, SMD-Teile etc. in einem entsprechenden Verfahren zu verlöten. Die paar Euros mehr für ein fertiges und geprüftes Board sind gut investiert.
Als Bluetoothmodul habe ich mein schon vorhandenes Bluetooth von Flyduino verwendet:
http://flyduino.net/Serial-Bluetooth-Adapter-PlugnPlay-fuer-Android-App
Dieses funktioniert (richtig angeschlossen) plug and play! Jedoch muss noch ein entsprechendes Kabel beschafft werden, um es im Kisssysboard in die entsprechende Buche stecken zu können:
https://www.viacopter.eu/multirotor-shop/camera-gimbals/imu-wire-35-cm-112-127-128-multicopter-store
Wer direkt eine großen Copter bauen will, sollte sich das neue N4-Board bestellen. Es ist größer, hat Spannungsversorgung, bluetooth, etc. verbaut:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-expansion-options/n4-expansion-board/
Damit das Bluetoothmodul am Kisssysboard auch funktioniert, muss die 3,3 Volt Spannungsversorgung gesichert werden. Dies geschieht mittels einer einfachen Kabelverbindung (siehe oben Bild vom Kisssysboard, rotes Kabel). Wenn man das nicht macht, werden außerdem keine Daten auf der Micro-SD-Karte aufgezeichnet. Wenn es trotzdem nicht klappt, kann es an dem Kartenschacht für die Micro-SD-Karte liegen. Am Ende sind zwei Kontakte, die durch das Einschieben der Karte geschlossen werden müssen. Dadurch wird das Vorhandensein der Karte signalisiert und die Aufzeichnung beginnt. Bei mir war dies defekt und es hat gedauert, bis ich den Fehler gefunden habe, denn optisch war alles ok:

Thread dazu: http://fpv-community.de/showthread.php?61691-Kisssys-Board-zeichnet-keine-Daten-auf-SD-Card-auf
_________________________________________________
Teil 5 GPS-Antenne
Als GPS-Antenne habe ich bei viacopter.eu eine Taoglas AP10F mitbestellt. Leider ist das Anschlusskabel recht kurz:
https://www.viacopter.eu/multirotor-shop/autoquad-m4/gps-antenna-10mm,-25db-137-multicopter-store
Mit einem Preis von 31,25€ kein Schnäppchen und nach sehr vielen Versuchen habe ich damit einfach keinen befriedigenden Emfpang hingekriegt. Das Problem haben andere auch. Ich kann die Antenne nicht empfehlen. Mit einer einfachen selbstgebastelten Dipolantenne hat man mehr Erfolg und kommt deutlich günstiger davon.
Hier der Thread zum Aufbau von GPS-Antennenhalterungen:
http://fpv-community.de/showthread.php?59518-GPS-Antenne-am-Ladybird-anbauen
Großer Abstand der GPS-Antenne zur HF-strahlenden FC hat nicht ausgereicht. Ohne Kisssysboard war der Empfang besser, aber nicht ausreichend. Ich habe noch ein GPS-Shield gebaut, aber auch das brachte nichts:

Zum GPS-Shield und zur GPS-Antenne generell gibt es noch folgende Infos:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-gps-antenna-options/
Die Diskussion um den Emfpang wurde auch hier geführt:
http://fpv-community.de/showthread.php?62160-Zeigt-her-Eure-AQ-M4V2-Minicopter
und hier:
http://fpv-community.de/showthread.php?62582-Autoquad-Anzahl-der-empfangenden-Satelliten-sehen
_________________________________________________
6. Fazit
Projekt gescheitert!
Ich gebe zwar normalerweise nicht auf, aber hier macht es für mich keinen Sinn, weiterzumachen.
Probleme:
1. nicht ausreichender GPS-Emfpand
2. zu geringe Flugzeit
Ich baue nur einen herkömmlichen Quadrocopter zum Testen einer neuen 35mm-GPS-Antenne (18gr) sowie die Verwendung eines Microarduino, sodass bluetooth und Graupner-Hott-Telemetrie gleichzeitig betrieben werden können. Wenn das alles funktioniert, wird ein Microcopter auf Basis des neuen Scout oder Blitz aufgebaut.
_________________________________________________
Interessante Links zu weiteren kleinen M4-Minicoptern:
http://fpv-community.de/showthread.php?62160-Zeigt-her-Eure-AQ-M4V2-Minicopter
http://www.multikopter-forum.de/autoquad/1491-autoquad-m4.html
anbei ein kleiner Baubericht zu meinem ersten Autoquad-Projekt auf Basis eines M4V2.
Im Grunde erst mal nichts besonderes, denn auf Basis des Ladybirds gibt es diverse Minicopter mit M4V2:
http://autoquad.org/wiki/wiki/building-developing/autoquad-reference-builds/m4-ladybird-v2/
Ich bin einen etwas anderen Weg gegangen und wollte stärkere Motoren und bessere Lipos verbauen.
Vielleicht kann ich den einen oder anderen dazu begeistern, sich auch an Autoquad heranzuwagen, denn inzwischen ist es mit dem M4 nicht nur sehr bezahlbar geworden, sondern es ist wirklich extrem genial, dass man mit einem Copter mit nur ca. 70 Gramm Wegpunktfliegen kann und das bei der bequemen Eingabe über ein Android-Handy mittels App und Übermittlung via bluetooth.
Leider spielt sich derzeit noch das meiste im englischen Autoquadforum ab. Aufgrund der anfangs etwas schwierigen Materie schreckt dies vielleicht den einen oder anderen ab. Inzwischen tummeln sich ein paar hier im deutschen Ableger und man bekommt Fragen auch in Deutsch beantwortet;
http://fpv-community.de/forumdisplay.php?48-AutoQuad
Das "magische Auge" meines Minis ist die M4V2, die wirklich sehr klein ist und dennoch alles erforderliche inklusive eines Empfängers (Spektrum, andere möglich) enthält:


Als Rahmen habe ich einen Acrylrahmen vom Micro-Motor-Warehouse gewählt, den es heute nicht mehr gibt. Inzwischen sind diese aus einem Stück gefertigt:
http://micro-motor-warehouse.com/collections/frames
Mein Rahmen hat gedruckte weiße Motorhalterungen für 8mm brushed-Motoren, die erstaunlich stabil sind:
Die FC darauf zu befestigen, war ein wenig kniffelig. Die Lochabstände passen nicht und die M4V2 hat nur M2 Löcher! Solche Distanzbolzen sind schwer zu kriegen, aber ich wurde hier fündig:
http://www.ebay.de/itm/10-Stuck-Abs...28?pt=LH_DefaultDomain_77&hash=item2ed727bd54
Da sie mir mit 10mm zu hoch waren, wurden sie halbiert. Ferner war problematisch, dass sogar diese kleinen Distanzbolzen zu breit sind und an die Bauteile stoßen. Daher habe ich oben auf die Distanzbolzen noch mal M2-Kunststoffmuttern geklebt, wie auf dem Bild zu erkennen. Keinesfalls dürfen die Löcher auf M2,5 aufgebohrt werden. Dann ist die FC defekt!
Schraubt man die Distanzbolzer erst mal an die FC, dann sieht das so aus:


So lässt es sich dann auch gut mit jeweils einem kleinen Tropfen 5-Minuten-Epoxydharz auf den vorher angerauten Acrylrahmen kleben:
Nachdem nun die Abstandsbolzen angeklebt wurden, kamen die Motorhalterungen an die Reihe. Die passenden Motoren habe ich auch aus dem Micro-Motor-Warehouse bezogen. Es sind 8,5er Motoren und damit stärker als die üblichen Hubsan-/Ladybird-Motoren:
http://micro-motor-warehouse.com/collections/all/products/cl-0820-15
Ich habe mich auf die Angabe verlassen, die bei Benedikt auf der Seite steht: Maximal 40g Schub. Im Augenblick kann ich das so nicht bestätigen. Da ich es immer genau wissen will, habe ich dafür einen kleinen Motorteststand gebaut:
Benedikt hat mir empfohlen, anstatt der Hubsan-Propeller, die Propeller vom Parrot Rolling Spider zu verwenden. Diese sind etwas größer:


Auf meinem Motorteststand konnte ich leider nur einen geringen Unterschied zwischen den Propellern feststellen. Auch erreichte der 8,5er Motor mit den größeren Propellern nur 30g Schub. Zugegeben, mein Motorteststand hat auch Schwächen. Bei Gelegenheit werde ich mal versuchen, den Schub des gesamten Copters zu messen.
Auch der größere Propeller vom Rolling Spider passt noch gut auf den Rahmen:
Leider mussten fast alle Motorkabel verlängert werden. Dafür konnte ich sie dann gleich so lang machen, dass sie unter der FC verlegt werden können. Ferner wurde das Baro des M4V2 mit dichtem Schaumstoff abgedeckt:
Zwischendurch mal ein Größenvergleich mit einem Cheerson CX-10, wobei die M4 bei wenig mehr Größe deutlich mehr Technik enthält:
Ende Teil 1. Weiter gehts im Teil 2 mit dem Lipo
------------------------------------------------------------------------------------------
2. Teil - LiPo
Die ursprünglich für Copter wie Ladybird und Hubsan vorgesehenen LiPos mit 370/380 mAh sind tatsächlich etwas schwach auf der Brust, sowohl die C-Rate als auch die verfügbare Kapazität. Da ich nun die stärkeren 8,5er Motoren verwende und der Copter auch einiges mehr wiegen wird, als z.B. ein Hubsan, muss ein stärkerer LiPo her. Also warum nicht einfach einen basteln.
Gekauft habe ich von Hobbyking den
Rhino 610mAh 2S 7.4v 20C Lipoly Pack (EU Warehouse)
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=50122
Da es sich um ein 2S handelt, wurde vorsichtig die Hülle entfernt und aus einem 2S zwei 1S LiPos erstellt:


Mehr zum Test hattee ich noch folgenden LiPo mitbestellt:
Turnigy nano-tech 600mah 1S 35~70C Lipo (Nine Eagles Solo Pro 328, Eflite MQX, 120SR) (EU Warehouse)
https://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=32782
Im nachhinein muss ich sagen, dass der fertige nano-tech 600mAh die bessere Wahl ist. Gefühlt hält er länger die Spannung und gibt mehr Kapazität ab. Mit einem Preis von 3,22 Euro zu 2 Euro (4,06 Euro für den 2S gesamt) lohnt sich der Aufwand des Selbstbastelns sowieso nicht, zumal noch ein Anschlusskabel für die 2. Zelle benötigt wird.
Der LiPo wird mit einem Stück Klett-Klebeband beidseitig befestigt. Zusätzlich umschließt ein dünnes doppelseitiges Band den LiPo und fixiert ihn fest von unten am Rahmen.
Ende Teil 2 - weiter gehts im Teil 3 mit dem Einrichten des M4 zum Erstflug
---------------------------------------------------------------------------------------
Teil 3 - letzte Arbeiten, Einrichten der AutoQuad-Firmware - Erstflug
Nachdem die Motorkabel entsprechend verlängert und fixiert worden waren (die Motorbuchsen auf der FC eingelötet wurden) und ein Gegenstück zum Akkukabel an der FC festgelötet worden ist, fehlte nur noch das Aufspielen der aktuellen Firmware.
Autoquad kann mit Quatos oder PIDS eingestellt werden:
Quatos
Für kleine Copter (ich glaube bis 1,5 kg) liegt beim M4 eine Lizenz zur Nutzung von Quatos anbei. Bei größeren Copter ist eine Lizenzgebühr zu zahlen. Aber wofür ist Quatos? Vereinfacht gesagt, muss mit recht hohem Aufwand jede einzelne Masse gewogen und die genaue Position zum Mittelpunkt des Copters vermessen und anschließend eingegeben werden. Wenn man das für alle Teile des Copters macht, ergibt sich daraus wohl ein besonders gutes Regelverhalten. Mag sein, dass ich dazu noch keinen perfekt eingestellten Copter live gesehen habe, aber die Videos dazu überzeugen mich nicht. Für mich ist das ein Rückschritt. In Zeiten, in denen DJI mit wenigen PID-Werten einen Copter genial fliegen lässt, stellt sich für mich die Frage, was das ganze soll? Man kann aus allem eine Wissenschaft machen - oder ein Wissenschaftler programmiert es so genial, dass man es einfach nutzen kann. Jedem das seine.
PIDS
Man kann anstatt Quatos auch einfach die gewohnten PIDS nutzen, allerdings musste ich auch hier feststellen, dass die Autoquadwelt bei diesen Werten auch etwas anders tickt. Die Logik habe ich noch nicht durchblickt. Eine wirklich gute Dokumentation habe ich dazu auch noch nicht gesehen. ABER: Es gibt für Autoquad sog. Referenzbauten:
http://autoquad.org/wiki/wiki/building-developing/autoquad-reference-builds/
Für den Ladybird oder ähnliche Copter gibt es dazu ein ein Referenzfile mit allen Einstellungswerten, welches nach dem Einspielen der Firmware einfach geladen werden kann:
http://autoquad.org/wiki/wiki/build...reference-builds/m4-lb-size-3d-printed-parts/
Die passende Firmware gibt es hier:
http://autoquad.org/software-downloads/firmware-download-wizard/
Vorab ist natürlich noch die Ground Control Station zu installieren:
http://autoquad.org/software-downloads/?category=2
Stressig wird es, weil noch Treiber zu installieren sind, damit der Anschluss über USB funktioniert und die Firmware gebrannt werden kann. Den Ablauf findet man hier:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-installation-setup/
Wenn nach der Installation aller Treiber etc. das flashen nicht klappt, einfach mal den USB-Port wechseln. Diesen Tip habe ich im englischen Autoquadforum gelesen. Genau erklären kann ich es nicht. Vermutlich habe ich genau einen USB3-Anschluss am Laptop und genau der funktioniert.
Eine Besonderheit gab es bei mir. Obwohl ich dachte, ich hätte die Laufrichtung der Motoren korrekt montiert und entsprechend der Vorgaben die Motoren eingebaut, war es leider genau verkehrt herum. Aber das ist kein Beinbruch und lässt sich bei Autoquad schnell ändern:
http://autoquad.org/wiki/wiki/configuring-autoquad-flightcontroller/frame-motor-mixing-table/
Einfach alle Vorzeichen bei Roll und Pitch umdrehen und die Drehrichtung jedes Motors ist in der Firmware umgedreht worden.
Und der Empfänger?
Der ist schon integriert und kann mit einer Spektrumfunke gebunden werden. Dazu muss eine Lötbrücke geschlossen werden und in der Groundcontrol sind wie gewohnt die Kanäle den einzelnen Funktionen zuzuordnen:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-radio-options/
Ferner muss bei Nutzung des internen Empfängers noch eine Antenne angebracht werden. Dafür kann man z.B. eine Graupner 2,4 Ghz Ersatzantenne für einen GR-16 kaufen. Der Stecker passt.
Ein bißchen Kalibrieren muss noch sein. Mein Erstflug habe ich zwar ohne gemacht, sollte aber doch vorher durchgeführt werden.
1. Einfache onboard DIMU Kalibrierung
Über die Fernsteuerung mittels Stickeingabe wird die horizontale und vertikale Kalibrierung durchgeführt. Sehr einfach und hier gut dargestellt:
http://autoquad.org/wiki/wiki/confi...utoquad-calibrations/onboard-imu-calibration/
2. Kompasskalibrierung
Ebenfalls durch Stickeingabe an der Fernsteuerung einzuleiten, jedoch durch weitere Stickeingabe abzuspeichern, hier zu sehen:
http://autoquad.org/wiki/wiki/confi...utoquad-calibrations/onboard-imu-calibration/
Aber: Die Beschreibung ist ein wenig kurz gehalten. Durch die Stickeingabe wird die Kompasskalibierung gestartet. Drei LED´s blinken schnell. Nun bewegt man das Board mehrfach in jeder Achsrichtung (X, Y, Z). Dabei werden die LED´s immer langsamer, bis sie dann irgendwann alle erloschen sind und wieder so leuchten, wie vor der Einleitung der Kompasskalibierung. Anschließend duch eine andere Stickeingabe die Kalibrierung speichern. Wenn eine Bluetoothverbindung besteht, können die Vorgänge auch über die Groundcontrol eingeleitet werden.
Und dann kann es losgehen. Damit man noch weiß, was die ganzen blinkenden LED´s bedeuten, sollte man noch folgende Seite verinnerlichen:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-operations-functions/
Hier der Erstflug. Sieht nur deshalb zappelig aus, weil ich die Reaktionen testen wollte. Flog nicht schlecht, allerdings waren die Reaktionen auf die Steuerbefehle sehr träge:
https://vimeo.com/124457409
P.S.: Der Flug war mit Standardwerten in den PIDS. Dann hängt er allerdings sehr träge an den Sticks. Ich empfehle, CTRL_TLT_ANG_D von 8400 auf 5400 zu reduzieren!
Ende Teil 3 - weiter geht es mit Teil 4 - Erweiterungsboard und Bluetoothmodul
------------------------------------------------------------------------
Teil 4 - Expansionboard und Bluetoothmodul - Auswahl und Anschluss
Für das M4 gibt es inzwischen eine Vielzahl von Erweiterungsboards. Diese werden benötigt, um auf der wirklich sehr kleinen FC nicht vorhandene Funktionen zu erhalten, wie z.B. die Aufzeichnung der Telemetriedaten auf einer SD-Karte oder den Anschluss eines Bluetoothmoduls oder den Anschluss von Reglern, um Brushlessmotoren zu betreiben (interne Regler für die Brushedmotoren sind ja vorhanden). Das Bluetoothmodul erlaubt es dann, auf freiem Feld mittels Androidhandy (oder Laptop mit bluetooth) und Autoquadapp vor Ort, Wegpunkte einzugeben oder Livedaten zu sehen und zu hören!
Die Erweiterungsboards werden über die mittigen Stecksockel mit insgesamt 20 Kontakten angeschlossen:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-expansion-options/
Ich habe mir das Kisssys Expansion Board mitbestellt:
Siehe hier: http://autoquad.org/wiki/wiki/m4-microcontroller/m4-expansion-options/kisssys-expansion-board-2/
Das Kisssysboard hat einen Steckplatz für eine Mikro-SD-Karte, einen Steckeranschluss für ein Bluetoothmodul sowie 4 Konkakte zum Anschluss von ESC für Brushedmotoren. Das Kisssysboard hat den Vorteil, dass es sehr klein und leicht ist und ist daher für meine Zwecke gut geeignet. Allerdings habe ich inzwischen den Eindruck, dass es eine extreme HF-Schleuder ist. Zumindes ist der GPS-Emfpang ohne dieses Board besser. Leider habe ich kein Messgerät, um dies in Werten darzustellen. Das Kisssysboard gibt es fertig oder zu selber löten. Letzteres kann ich nicht empfehlen, wenn man keine Möglichkeit hat, SMD-Teile etc. in einem entsprechenden Verfahren zu verlöten. Die paar Euros mehr für ein fertiges und geprüftes Board sind gut investiert.
Als Bluetoothmodul habe ich mein schon vorhandenes Bluetooth von Flyduino verwendet:
http://flyduino.net/Serial-Bluetooth-Adapter-PlugnPlay-fuer-Android-App
Dieses funktioniert (richtig angeschlossen) plug and play! Jedoch muss noch ein entsprechendes Kabel beschafft werden, um es im Kisssysboard in die entsprechende Buche stecken zu können:
https://www.viacopter.eu/multirotor-shop/camera-gimbals/imu-wire-35-cm-112-127-128-multicopter-store
Wer direkt eine großen Copter bauen will, sollte sich das neue N4-Board bestellen. Es ist größer, hat Spannungsversorgung, bluetooth, etc. verbaut:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-expansion-options/n4-expansion-board/
Damit das Bluetoothmodul am Kisssysboard auch funktioniert, muss die 3,3 Volt Spannungsversorgung gesichert werden. Dies geschieht mittels einer einfachen Kabelverbindung (siehe oben Bild vom Kisssysboard, rotes Kabel). Wenn man das nicht macht, werden außerdem keine Daten auf der Micro-SD-Karte aufgezeichnet. Wenn es trotzdem nicht klappt, kann es an dem Kartenschacht für die Micro-SD-Karte liegen. Am Ende sind zwei Kontakte, die durch das Einschieben der Karte geschlossen werden müssen. Dadurch wird das Vorhandensein der Karte signalisiert und die Aufzeichnung beginnt. Bei mir war dies defekt und es hat gedauert, bis ich den Fehler gefunden habe, denn optisch war alles ok:
Thread dazu: http://fpv-community.de/showthread.php?61691-Kisssys-Board-zeichnet-keine-Daten-auf-SD-Card-auf
_________________________________________________
Teil 5 GPS-Antenne
Als GPS-Antenne habe ich bei viacopter.eu eine Taoglas AP10F mitbestellt. Leider ist das Anschlusskabel recht kurz:
https://www.viacopter.eu/multirotor-shop/autoquad-m4/gps-antenna-10mm,-25db-137-multicopter-store
Mit einem Preis von 31,25€ kein Schnäppchen und nach sehr vielen Versuchen habe ich damit einfach keinen befriedigenden Emfpang hingekriegt. Das Problem haben andere auch. Ich kann die Antenne nicht empfehlen. Mit einer einfachen selbstgebastelten Dipolantenne hat man mehr Erfolg und kommt deutlich günstiger davon.
Hier der Thread zum Aufbau von GPS-Antennenhalterungen:
http://fpv-community.de/showthread.php?59518-GPS-Antenne-am-Ladybird-anbauen
Großer Abstand der GPS-Antenne zur HF-strahlenden FC hat nicht ausgereicht. Ohne Kisssysboard war der Empfang besser, aber nicht ausreichend. Ich habe noch ein GPS-Shield gebaut, aber auch das brachte nichts:
Zum GPS-Shield und zur GPS-Antenne generell gibt es noch folgende Infos:
http://autoquad.org/wiki/wiki/m4-microcontroller/m4-gps-antenna-options/
Die Diskussion um den Emfpang wurde auch hier geführt:
http://fpv-community.de/showthread.php?62160-Zeigt-her-Eure-AQ-M4V2-Minicopter
und hier:
http://fpv-community.de/showthread.php?62582-Autoquad-Anzahl-der-empfangenden-Satelliten-sehen
_________________________________________________
6. Fazit
Projekt gescheitert!
Ich gebe zwar normalerweise nicht auf, aber hier macht es für mich keinen Sinn, weiterzumachen.
Probleme:
1. nicht ausreichender GPS-Emfpand
2. zu geringe Flugzeit
Ich baue nur einen herkömmlichen Quadrocopter zum Testen einer neuen 35mm-GPS-Antenne (18gr) sowie die Verwendung eines Microarduino, sodass bluetooth und Graupner-Hott-Telemetrie gleichzeitig betrieben werden können. Wenn das alles funktioniert, wird ein Microcopter auf Basis des neuen Scout oder Blitz aufgebaut.
_________________________________________________
Interessante Links zu weiteren kleinen M4-Minicoptern:
http://fpv-community.de/showthread.php?62160-Zeigt-her-Eure-AQ-M4V2-Minicopter
http://www.multikopter-forum.de/autoquad/1491-autoquad-m4.html
Zuletzt bearbeitet:
")





