Heute wollte ich die PIDs meines Fliegers weiter tunen.
Zu Hause wurde noch mal der Kompass und Gyro kalibriert. Anfangs lief alles wunderbar.
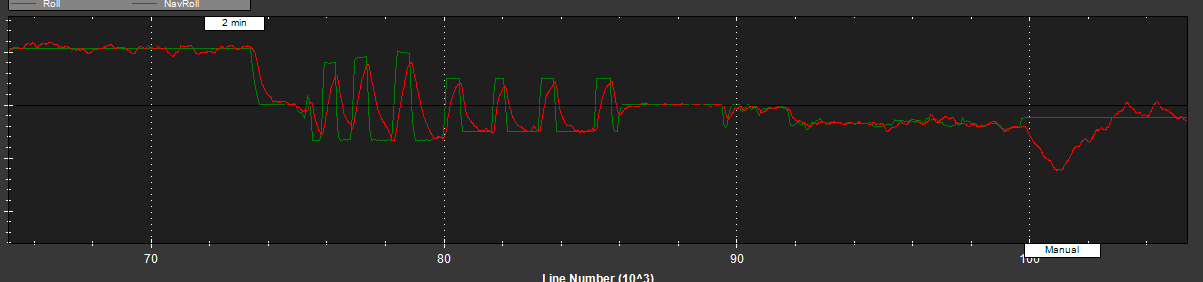
Testflug in FBWA als ich wieder auf Manuel umschaltete, ich lande lieber "zu Fuß" weil ich den Braten noch nicht richtig traue, ist Nav_roll in der Luft bei exakt -20 Grad hängen geblieben. Ein Akku abklemmen hat auch nicht geholfen. Dies ist mir erst zuhause beim Log auswerten aufgefallen und es ist kein Wunder dass der Vogel danach nur noch wie ein Haufen Mist flog.
Wie kann den sowas passen?
Bug Kaputt?
Zu Hause wurde noch mal der Kompass und Gyro kalibriert. Anfangs lief alles wunderbar.
Testflug in FBWA als ich wieder auf Manuel umschaltete, ich lande lieber "zu Fuß" weil ich den Braten noch nicht richtig traue, ist Nav_roll in der Luft bei exakt -20 Grad hängen geblieben. Ein Akku abklemmen hat auch nicht geholfen. Dies ist mir erst zuhause beim Log auswerten aufgefallen und es ist kein Wunder dass der Vogel danach nur noch wie ein Haufen Mist flog.
Wie kann den sowas passen?
Bug Kaputt?