
Hallo zusammen,
heute zum ersten mal bin ich mit meinem neuen Naze32 geflogen.
Mir ist einiges noch nicht klar, grundsätzlich fliege ich im Angle Mode und manchmal im Acro.
als erstes habe ich mir meine Modes auf verschiedene Schalter gelegt.
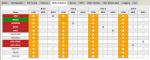
Der Einsatz von MAG und BARO sind mir noch nicht klar. Also das MAG mein Kompass ist und das BARO mein Luftdruck Höhenhalter ist, ist mir klar. Aber wie setze ich sie ein, bzw. welche Kombination? Kann ich sie einzeln einsetzten oder immer nur zusammen? Warum wenn ich mit dem Schalte BARO (Aux 3 med) aktiv habe, sinkt mein Copter so abrupt um 5-10 cm nach unten wenn ich leicht vom Gas gehe? Gibt es eine Prio, zuerst MAG und erst dan dazu BARO?
Was passiert wenn ich mehreren Funktionen auf ein Schalter habe, als z.B. Angle, Baro, Mag auf AUX 3 med?
Was passiert wenn z.B. AUX schon auf Horizont ist und ich dann den AUX 3 med umschalte, den ich vorher erwähnt habe mit den Multifunktion?
Hmm wie gesagt da bin ich verwirrt.
AUX4 high, habe ich mit GPS Home und AUX4 med habe ich GPS Hold.
Sind meine Einstellungen richtig? Muss ich da MAG und BARO auch aktivieren? Muss ich da auch ein Flugmodus wie zB Horizont oder Angle einstellen?
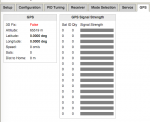
Mit meine GPS Einstellungen habe ich leider kein Erfolg gehabt, weder mit Hold noch mit Home. Ich habe übrigens mit meinem Laptop noch kurz geschaut auf google maps wo er die Koordinaten gesetzt hat und die waren richtig, also es war auf dem Feld den ich war.
Das GPS Modul (ublox CN-06) hatte ca.8 Satelliten und blinkte Grün. Das FC (Naze32) ist so eingestellt
Beim umstellen des Schalter AUX4 auf Hold, hat der Copter seine Position gesucht und hat immer grössere "Korrekturen" um den "Punkt" gemacht. Habe den AUX4 wieder zurückgestellt also GPS deaktiviert.
Etwas später habe ich GPS Home auf dem AUX 4 umgestellt und da ist der Kopter zurückgeflogen da wo er gearmt worden ist, aber auch da hat er den "Punkt" nicht gefunden und had immer grössere Radien gemacht bis er fast abgestürzt ist. Ich habe keine Ahnung was da passiert.
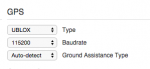
Wenn ich ein GPS Passthrough mache, dann kommt so etwas heraus.
Sieht nicht gut aus, aber nur so hat mein NAZE32 ein GPS Signal.
Wenn ich es NMEA Einstelle, dann kann ich "Anständige" Werte lesen, aber das nutzt eben nicht.
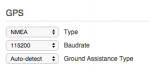
Sieht besser aus, aber da bekomme ich kein Satellit, bzw. der Naze meint das ich kein GPS Fix bekomme. Der GPS Blinkt aber Grün.
Viel Text viele Fragen, sorry aber ich finde keine Angaben zu meine Fragen und Probleme.
heute zum ersten mal bin ich mit meinem neuen Naze32 geflogen.
Mir ist einiges noch nicht klar, grundsätzlich fliege ich im Angle Mode und manchmal im Acro.
als erstes habe ich mir meine Modes auf verschiedene Schalter gelegt.
Der Einsatz von MAG und BARO sind mir noch nicht klar. Also das MAG mein Kompass ist und das BARO mein Luftdruck Höhenhalter ist, ist mir klar. Aber wie setze ich sie ein, bzw. welche Kombination? Kann ich sie einzeln einsetzten oder immer nur zusammen? Warum wenn ich mit dem Schalte BARO (Aux 3 med) aktiv habe, sinkt mein Copter so abrupt um 5-10 cm nach unten wenn ich leicht vom Gas gehe? Gibt es eine Prio, zuerst MAG und erst dan dazu BARO?
Was passiert wenn ich mehreren Funktionen auf ein Schalter habe, als z.B. Angle, Baro, Mag auf AUX 3 med?
Was passiert wenn z.B. AUX schon auf Horizont ist und ich dann den AUX 3 med umschalte, den ich vorher erwähnt habe mit den Multifunktion?
Hmm wie gesagt da bin ich verwirrt.
AUX4 high, habe ich mit GPS Home und AUX4 med habe ich GPS Hold.
Sind meine Einstellungen richtig? Muss ich da MAG und BARO auch aktivieren? Muss ich da auch ein Flugmodus wie zB Horizont oder Angle einstellen?
Mit meine GPS Einstellungen habe ich leider kein Erfolg gehabt, weder mit Hold noch mit Home. Ich habe übrigens mit meinem Laptop noch kurz geschaut auf google maps wo er die Koordinaten gesetzt hat und die waren richtig, also es war auf dem Feld den ich war.
Das GPS Modul (ublox CN-06) hatte ca.8 Satelliten und blinkte Grün. Das FC (Naze32) ist so eingestellt
Beim umstellen des Schalter AUX4 auf Hold, hat der Copter seine Position gesucht und hat immer grössere "Korrekturen" um den "Punkt" gemacht. Habe den AUX4 wieder zurückgestellt also GPS deaktiviert.
Etwas später habe ich GPS Home auf dem AUX 4 umgestellt und da ist der Kopter zurückgeflogen da wo er gearmt worden ist, aber auch da hat er den "Punkt" nicht gefunden und had immer grössere Radien gemacht bis er fast abgestürzt ist. Ich habe keine Ahnung was da passiert.
Wenn ich ein GPS Passthrough mache, dann kommt so etwas heraus.
HTML:
µb4Hl@ÄC&@ä¶&Ð'"gþbµbHl@ýkz†µb
Hl˜½ÿÿÿÿÿÿ„ßµb$HlЀ¨šµb4m@ÄC&@ä¶&Ð'"gÇ5µbm@Ål
8µb
m˜½ÿÿÿÿÿÿ„ßãµb$mЀ¨Ëݵb4Øm@ÄC&@ä¶&Ð'"gÕµbØm@mÛµb
Øm˜½ÿÿÿÿÿÿ„ß«ðµb$ØmÐ
€¨“ýµb4*n@ÄC&@ä¶&Ð'"gX¨µb*n@Un/µb
*n˜½ÿÿÿÿÿÿ„ßtëµb$*nЀ¨\@µb4ho@ÄC&@ä¶&Ð'"g!{µbho@
oÁ?
µb
ho˜½ÿÿÿÿÿÿ„ß=æµb$hoЀ¨%ƒµb40p@ÄC&@ä¶&Ð'"gêNµb0p@åoRîµb
0p˜½ÿÿÿÿÿÿ„ßáµb$0pÐ
€¨îƵb4øp@ÄC&@ä¶&Ð'"g²îµbøp@*p㑵b
øp˜½ÿÿÿÿÿÿ„ßÎÁµb$øpÐ
€¨¶æµb4Àq@ÄC&@ä¶&Ð'"g{ÁµbÀq@uquCµb
Àq˜½ÿÿÿÿÿÿ„ß—¼µb$ÀqÐ
€¨)µb4ˆr@ÄC&@ä¶&Ð'"gD”µbˆr@=rõµb
ˆr˜½ÿÿÿÿÿÿ„ß`·µb$ˆrЀ¨Hlµb4Ps@ÄC&@ä¶&Ð'"gWenn ich es NMEA Einstelle, dann kann ich "Anständige" Werte lesen, aber das nutzt eben nicht.
HTML:
# gpspassthrough
$GPRMC,,V,,,,,,,,,,N*53
$GPVTG,,,,,,,,,N*30
$GPGGA,,,,,,0,00,99.99,,,,,,*48
$GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30
$GPGSV,1,1,03,01,,,21,02,,,22,03,,,26*7D
$GPGLL,,,,,,V,N*64
$GPRMC,,V,,,,,,,,,,N*53
$GPVTG,,,,,,,,,N*30
$GPGGA,,,,,,0,00,99.99,,,,,,*48
$GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30
$GPGSV,1,1,02,01,,,21,02,,,21*78
$GPGLL,,,,,,V,N*64
$GPRMC,,V,,,,,,,,,,N*53
$GPVTG,,,,,,,,,N*30
$GPGGA,,,,,,0,00,99.99,,,,,,*48
$GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30
$GPGSV,1,1,02,01,,,21,02,,,21*78
$GPGLL,,,,,,V,N*64
$GPRMC,,V,,,,,,,,,,N*53
$GPVTG,,,,,,,,,N*30Viel Text viele Fragen, sorry aber ich finde keine Angaben zu meine Fragen und Probleme.
Anhänge
-
 40,8 KB Aufrufe: 51
40,8 KB Aufrufe: 51


