
Hallo allerseits,
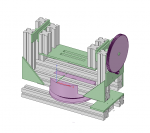
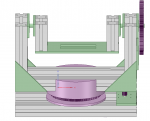
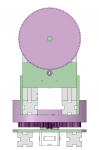
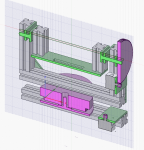
ich wollte hier mein neues Projekt vorstellen: Ein Pan/Tilt Timelapser mit Steppermotoren auf Basis eines Arduino.
Derselbe wird ebenfalls das Auslösen der Kamera übernehmen. Um für Sternenzeitraffer genug Spielraum zu haben,
plane ich für beide Achsen eine Übersetzung zwischen 1:10 und 1:20. Dann sollte auch ein günstiger Nema17 mit 200er Auflösung ausreichen. Das Einstellen des Bewegungsablauf soll über ein Android Smartphone erfolgen. Das Grundgerüst möchte ich aus einem Aluprofil 30x30 erstellen, die individuellen Bauteile sollen gedruckt werden. Wenn ich mit meiner Arbeit zufrieden bin und der erste Entwurf läuft, möchte ich das ganze Opensource weiterführen.
Zusammengefasst sind meine Anforderungen:
-transportabel (klein, leicht, robust)
-wetterfest (Elektronik sicher verstaut)
-vielseitig (Einsatz auf Boden und Stativ
-vielseitig/variabel (z.B. Anpassen an eine andere Kamera mit möglichst wenig Bauteilen)
Was bereits vorhanden ist:
-Auslösen der Kamera durch Arduino
-serielle Kommunikation Zwischen Arduino und Android
-ein wenig Erfahrung mit Arduino und Steppermotoren aus früheren Versuchen
-Programmierkenntisse
-ein erster CAD entwurf
Was fehlt:
-Erfahrung mit 3D Druck/CNC und CAD allgemein (Blöd, da das der Hauptteil der Arbeit ist )
)
Ich freue mich über Anmerkungen, Verbesserungen, Kritik, Fragen, Antworten und Diskussion jeglicher Art.
ich wollte hier mein neues Projekt vorstellen: Ein Pan/Tilt Timelapser mit Steppermotoren auf Basis eines Arduino.
Derselbe wird ebenfalls das Auslösen der Kamera übernehmen. Um für Sternenzeitraffer genug Spielraum zu haben,
plane ich für beide Achsen eine Übersetzung zwischen 1:10 und 1:20. Dann sollte auch ein günstiger Nema17 mit 200er Auflösung ausreichen. Das Einstellen des Bewegungsablauf soll über ein Android Smartphone erfolgen. Das Grundgerüst möchte ich aus einem Aluprofil 30x30 erstellen, die individuellen Bauteile sollen gedruckt werden. Wenn ich mit meiner Arbeit zufrieden bin und der erste Entwurf läuft, möchte ich das ganze Opensource weiterführen.
Zusammengefasst sind meine Anforderungen:
-transportabel (klein, leicht, robust)
-wetterfest (Elektronik sicher verstaut)
-vielseitig (Einsatz auf Boden und Stativ
-vielseitig/variabel (z.B. Anpassen an eine andere Kamera mit möglichst wenig Bauteilen)
Was bereits vorhanden ist:
-Auslösen der Kamera durch Arduino
-serielle Kommunikation Zwischen Arduino und Android
-ein wenig Erfahrung mit Arduino und Steppermotoren aus früheren Versuchen
-Programmierkenntisse
-ein erster CAD entwurf
Was fehlt:
-Erfahrung mit 3D Druck/CNC und CAD allgemein (Blöd, da das der Hauptteil der Arbeit ist
)Ich freue mich über Anmerkungen, Verbesserungen, Kritik, Fragen, Antworten und Diskussion jeglicher Art.
Anhänge
-
 54,9 KB Aufrufe: 38
54,9 KB Aufrufe: 38 -
 37,7 KB Aufrufe: 35
37,7 KB Aufrufe: 35 -
 17,4 KB Aufrufe: 34
17,4 KB Aufrufe: 34 -
 448,4 KB Aufrufe: 33
448,4 KB Aufrufe: 33







