
Hallo alle zusammen
ich werke jetzt schon einige Zeit an den PIDs meines quads herum bin aber mit dem Ergebnis nicht zufrieden.
Zum Quad:
-zusammenklappbare x-Anordnung
-ca. 280mm Motorabstand
-8x45 props
-Naze32
Der Quadrocopter fliegt eigentlich super (Acro-Mode) und ich verwende ihn eigentlich nicht für Luftbilder/Videos aber es steht bald ein Australien-Urlaub an und da soll der kleine mit.....
Im Video sieht man ein wobbeln, ich vermute um die Rollachse, bin mir aber nicht sicher.
Weiß jemand an welchen Werten ich da drehen muss um das in den Griff zu kriegen?
P.S. leichtes Jello ist vorhanden habe die Kamera zum testen aber ohne Vibrationsdämpfung montiert, mit bleibt "nur" das wobbeln über.
[video=vimeo;137401345]https://vimeo.com/137401345[/video]
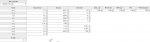
PIDs:
ich werke jetzt schon einige Zeit an den PIDs meines quads herum bin aber mit dem Ergebnis nicht zufrieden.
Zum Quad:
-zusammenklappbare x-Anordnung
-ca. 280mm Motorabstand
-8x45 props
-Naze32
Der Quadrocopter fliegt eigentlich super (Acro-Mode) und ich verwende ihn eigentlich nicht für Luftbilder/Videos aber es steht bald ein Australien-Urlaub an und da soll der kleine mit.....
Im Video sieht man ein wobbeln, ich vermute um die Rollachse, bin mir aber nicht sicher.
Weiß jemand an welchen Werten ich da drehen muss um das in den Griff zu kriegen?
P.S. leichtes Jello ist vorhanden habe die Kamera zum testen aber ohne Vibrationsdämpfung montiert, mit bleibt "nur" das wobbeln über.
[video=vimeo;137401345]https://vimeo.com/137401345[/video]
PIDs:

