
Hallo Community,
ich habe da mal eine Frage. Vielleicht könnt ihr mir da weiterhelfen.
Abgesehen davon dass letzten erst sich mein Pixhawk im Loiter-Mode selbsttändig gemacht hat und derbe gecrashed ist, habe ich mich einmal daran gemacht um die ganzen Parameter zu checken, und auch die Ansteuerung der ESCs. Ich habe mir mit einem Oszi die Steuersignale angeschaut die vom Pix zu den einzelnen ESCs gehen und dabei einige Unterschiede feststellen müssen.
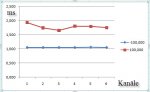
Wobei die Periode des Signals konstant 2,5ms ist und bei 3,3V liegt, sind die einzelnen Kanäle vom Timing her unterschiedlich. Wenn ich von -100 bis +100 den Kanal ansteuere, wechselt der Puls unterschiedlich je nach Kanal. Ich habe dazu eine einfach Grafik erstellt die im Anhang liegt.
Der Min-Wert liegt bei allen Kanälen ( habe 1 - 6 für Hexa gemessen ) 1,050ms wobei Kanal 5 mit 1,060 aus der Reihe tanzt. Jedoch die Max-Werte sind bei allen Kanälen unterschiedlich.
Das geht von 1,650 bis 1,930ms.
Ich kann mir vorstellen dass dies doch Einflüsse auf die Motordrehzahl hat, oder ?
Eigentlich hätte ich erwartet dass die synchron läuft und bei 100% Ansteuerung auf gleiche Werte rauskommen.
Ich wäre dankbar wenn mir da ein Spezi auf die Sprünge hilft.
LG Mike
ich habe da mal eine Frage. Vielleicht könnt ihr mir da weiterhelfen.
Abgesehen davon dass letzten erst sich mein Pixhawk im Loiter-Mode selbsttändig gemacht hat und derbe gecrashed ist, habe ich mich einmal daran gemacht um die ganzen Parameter zu checken, und auch die Ansteuerung der ESCs. Ich habe mir mit einem Oszi die Steuersignale angeschaut die vom Pix zu den einzelnen ESCs gehen und dabei einige Unterschiede feststellen müssen.
Wobei die Periode des Signals konstant 2,5ms ist und bei 3,3V liegt, sind die einzelnen Kanäle vom Timing her unterschiedlich. Wenn ich von -100 bis +100 den Kanal ansteuere, wechselt der Puls unterschiedlich je nach Kanal. Ich habe dazu eine einfach Grafik erstellt die im Anhang liegt.
Der Min-Wert liegt bei allen Kanälen ( habe 1 - 6 für Hexa gemessen ) 1,050ms wobei Kanal 5 mit 1,060 aus der Reihe tanzt. Jedoch die Max-Werte sind bei allen Kanälen unterschiedlich.
Das geht von 1,650 bis 1,930ms.
Ich kann mir vorstellen dass dies doch Einflüsse auf die Motordrehzahl hat, oder ?
Eigentlich hätte ich erwartet dass die synchron läuft und bei 100% Ansteuerung auf gleiche Werte rauskommen.
Ich wäre dankbar wenn mir da ein Spezi auf die Sprünge hilft.
LG Mike
Anhänge
-
 27,8 KB Aufrufe: 8
27,8 KB Aufrufe: 8

