
Ein Feund beschwerte sich bei mir, dass sein Pixhawk Hexa in den Althold Modi hüpft, wie diese Gummibälle, mit denen Kinder in den 70er Jahren so gerne gespielt haben.
Fehlerbild: Loiter / Pos/AltHold unbenutzbar, der Vogel macht Sprünge im Bereich von +/- 50cm, Baroschwankungen <2 dm im MP sichtbar.
Setup: DJI Hexa mit E305 , 3DR PIXHAWK FW 3.3.1, gute Vibrationsdämpfung überprüft mit Vibe Check, kein Clipping, dichter dunkler Baroschaum.
Vergebliche Maßnahmen: DEFAULT Einstellungen über Reset, Altitude Hold kP zu verändern (natürlich wirkungslos).
Lösung: http://dev.ardupilot.com/wiki/extended-kalman-filter/
Im Detail:
1.Im Log Browser copter althold betrachten.
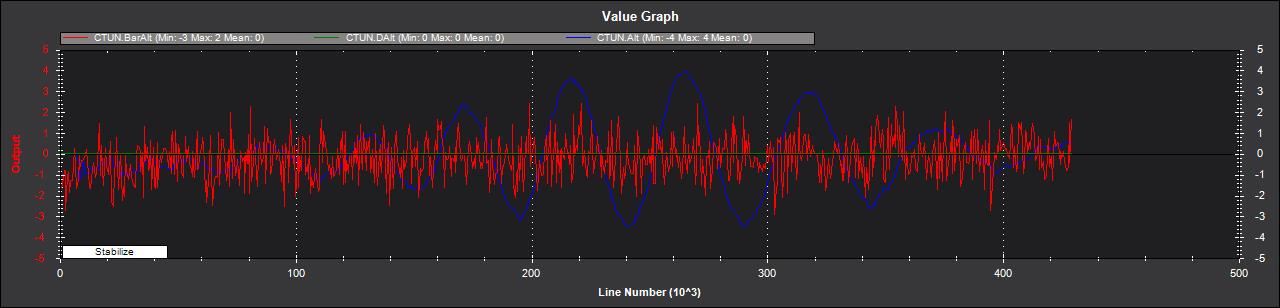
Die blaue sinusförmige Linie (CTUN.Alt) zeigt das Problem.
2. Im Log Browser EKF 3 /IPD betrachten:
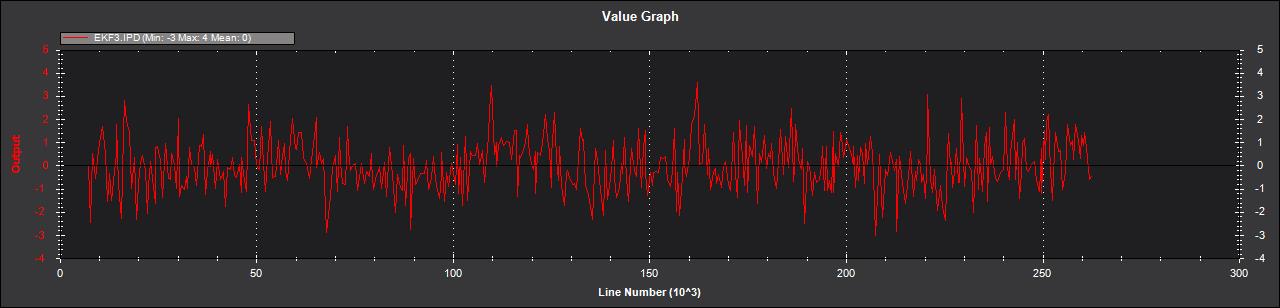
Die Maxima liegen bei -3/+4
3. Im Mission Planner unter Config/Tuning/Full Parameter List aufrufen und EKF_ALT_NOISE verändern:
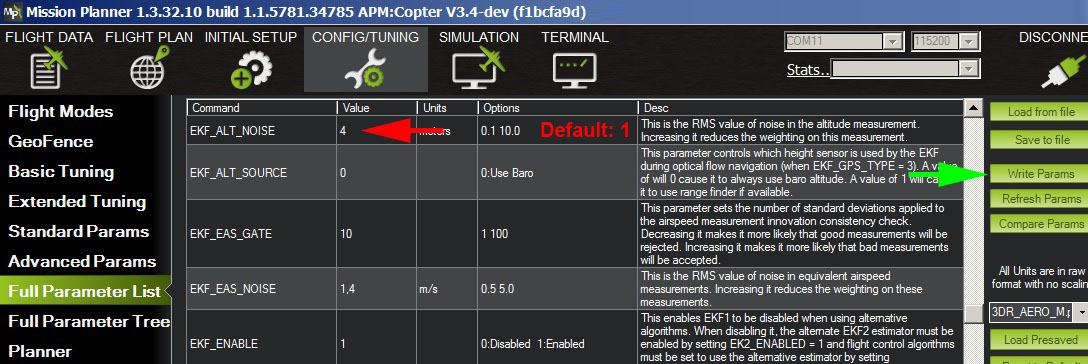
In diesem Fall wird von 1 (Default) auf 4 verändert, bei kleineren EKF 3 IPD Maxima würde man entsprechend kleinere Werte eintragen. Im MP mit Write abspeichern, FC reboot.
4. Problem behoben:
Der Copter ist keine Hupfdohle mehr und im Log Browser unter copter althold konnte man deutlich geringere CTUN.Alt Amplituden sehen.
Anmerkungen:
1. Sehr guter GPS Empfang ist Voraussetzung, da der EKF die Gewichtung vom Baro auf das GPS verschiebt.
2. Analog dazu kann man auch mit EKF_VELD_NOISE (Parameter zur Orientierung IVN,IVE,IVD ) herumspielen. Wechselwirkung beachten
3. Die Modifikation dieser Parameter ersetzt keinen Barofoam oder Vibrationsämpfung .
4. Nachspielen auf eigene Gefahr.
Viel Spaß !
Fehlerbild: Loiter / Pos/AltHold unbenutzbar, der Vogel macht Sprünge im Bereich von +/- 50cm, Baroschwankungen <2 dm im MP sichtbar.
Setup: DJI Hexa mit E305 , 3DR PIXHAWK FW 3.3.1, gute Vibrationsdämpfung überprüft mit Vibe Check, kein Clipping, dichter dunkler Baroschaum.
Vergebliche Maßnahmen: DEFAULT Einstellungen über Reset, Altitude Hold kP zu verändern (natürlich wirkungslos).
Lösung: http://dev.ardupilot.com/wiki/extended-kalman-filter/
Im Detail:
1.Im Log Browser copter althold betrachten.
Die blaue sinusförmige Linie (CTUN.Alt) zeigt das Problem.
2. Im Log Browser EKF 3 /IPD betrachten:
Die Maxima liegen bei -3/+4
3. Im Mission Planner unter Config/Tuning/Full Parameter List aufrufen und EKF_ALT_NOISE verändern:
In diesem Fall wird von 1 (Default) auf 4 verändert, bei kleineren EKF 3 IPD Maxima würde man entsprechend kleinere Werte eintragen. Im MP mit Write abspeichern, FC reboot.
4. Problem behoben:
Der Copter ist keine Hupfdohle mehr und im Log Browser unter copter althold konnte man deutlich geringere CTUN.Alt Amplituden sehen.
Anmerkungen:
1. Sehr guter GPS Empfang ist Voraussetzung, da der EKF die Gewichtung vom Baro auf das GPS verschiebt.
2. Analog dazu kann man auch mit EKF_VELD_NOISE (Parameter zur Orientierung IVN,IVE,IVD ) herumspielen. Wechselwirkung beachten
3. Die Modifikation dieser Parameter ersetzt keinen Barofoam oder Vibrationsämpfung .
4. Nachspielen auf eigene Gefahr.
Viel Spaß !

") Dank M8N fliege ich in der Regel mit 13-19 Satelliten, von daher sollte das egal sein.
Dank M8N fliege ich in der Regel mit 13-19 Satelliten, von daher sollte das egal sein.
