Hallo zusammen,
mein kleiner Quadcopter lässt sich im manuellen Modus nicht in einen stabilen Schwebezustand bringen. Entweder er steigt, oder er sinkt. Dazwischen gibt es eigentlich nichts. Er ist auf Gasbefehle überempfindlich und im höheren Drehzahlbereich fängt er auch an zu oszillieren. Mir ist klar, dass die default PID Einstellungen eher für schwerere Systeme gedacht sind. Auf Roll und Pitch reagiert der Kleine im Übrigen "lammfromm". Es geht nur um die Gas / Höhenregelung.
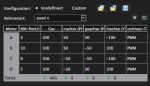
Kann mir jemand sagen, welche der PID Werte ich anpassen müsste? Ich vermute, dass es der "Navigation Höhe Geschwindigkeit" Wert ist, es wäre aber schön, wenn mir das Jemand bestätigen könnte.
Danke!
Gruß Frank
mein kleiner Quadcopter lässt sich im manuellen Modus nicht in einen stabilen Schwebezustand bringen. Entweder er steigt, oder er sinkt. Dazwischen gibt es eigentlich nichts. Er ist auf Gasbefehle überempfindlich und im höheren Drehzahlbereich fängt er auch an zu oszillieren. Mir ist klar, dass die default PID Einstellungen eher für schwerere Systeme gedacht sind. Auf Roll und Pitch reagiert der Kleine im Übrigen "lammfromm". Es geht nur um die Gas / Höhenregelung.
Kann mir jemand sagen, welche der PID Werte ich anpassen müsste? Ich vermute, dass es der "Navigation Höhe Geschwindigkeit" Wert ist, es wäre aber schön, wenn mir das Jemand bestätigen könnte.
Danke!
Gruß Frank
Anhänge
-
 183,5 KB Aufrufe: 19
183,5 KB Aufrufe: 19
Zuletzt bearbeitet: