
Hallo liebe Forumsgemeinde,
nachdem mich als Heliflieger auch die Multicopter reizten,
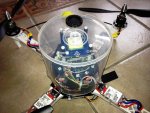
habe ich mir aus folgenden Komponenten einen Quadrocopter gebaut.
Der Copter soll hauptsächlich für Videoaufnahmen genutzt werden.
Rahmen:
Hobbyking SK450 Glass Fiber Quadcopter Frame 450mm (HK)
Motoren:
4 x NTM Prop Drive Series 28-26A 1200kv / 250w (HK)
Regler:
4 x Flashed ESC SimonK (RapidESC) - 20 AMP
http://witespyquad.gostorego.com/sp...shed-esc-with-rapidesc-fw-for-multirotor.html
Luftschraube:
10x4,5 (HK)
Flugcontroller:
MultiWii PRO Ez3.0 Flight Controller
http://witespyquad.gostorego.com/fl...pro-ez3-0-flight-controller-w-gps-option.html
GPS-Board:
uBlox 6H GPS W/ Mounting backplane and Compass
http://witespyquad.gostorego.com/fl...-6h-gps-w-mounting-backplane-and-compass.html
LED-Ring:
Readytofly MWC LED Ring I2C
http://witespyquad.gostorego.com/accessories/readytofly-mwc-led-ring-i2c.html
Akku:
3S 2200mA 30C
Empfänger:
Spektrum Satellitenempfänger
Firmware:
MultiWii 2.2
Erstaunlicherweise flog der Copter sofort ohne größere Einstellungen.
Auch Baro und GPS funktionieren super.
Der Copter bringt ein Abfluggewicht von 1,1 Kg auf die Wage
und erreicht damit eine Flugzeit von 5-6 Minuten.
Die gemessene Leistung beträgt bei Schwebepitch ca. 150-170 Watt.
Bei Vollpitch geht das dann hoch auf <200 Watt.
Jetzt meine zwei Fragen:
Wie kann ich die Flugzeit erhöhen?
Bringen kleinere Luftschrauben etwas oder müssen kleinere Motoren rein?
Im GPS Home Modus kommt der Copter wieder sauber zur Homeposition zurück.
Allerding bleibt er in einer höheren Flughöhe stehen, als die Home Position.
Kann man das einstellen?
Gruß
Marcel

nachdem mich als Heliflieger auch die Multicopter reizten,
habe ich mir aus folgenden Komponenten einen Quadrocopter gebaut.
Der Copter soll hauptsächlich für Videoaufnahmen genutzt werden.
Rahmen:
Hobbyking SK450 Glass Fiber Quadcopter Frame 450mm (HK)
Motoren:
4 x NTM Prop Drive Series 28-26A 1200kv / 250w (HK)
Regler:
4 x Flashed ESC SimonK (RapidESC) - 20 AMP
http://witespyquad.gostorego.com/sp...shed-esc-with-rapidesc-fw-for-multirotor.html
Luftschraube:
10x4,5 (HK)
Flugcontroller:
MultiWii PRO Ez3.0 Flight Controller
http://witespyquad.gostorego.com/fl...pro-ez3-0-flight-controller-w-gps-option.html
GPS-Board:
uBlox 6H GPS W/ Mounting backplane and Compass
http://witespyquad.gostorego.com/fl...-6h-gps-w-mounting-backplane-and-compass.html
LED-Ring:
Readytofly MWC LED Ring I2C
http://witespyquad.gostorego.com/accessories/readytofly-mwc-led-ring-i2c.html
Akku:
3S 2200mA 30C
Empfänger:
Spektrum Satellitenempfänger
Firmware:
MultiWii 2.2
Erstaunlicherweise flog der Copter sofort ohne größere Einstellungen.
Auch Baro und GPS funktionieren super.
Der Copter bringt ein Abfluggewicht von 1,1 Kg auf die Wage
und erreicht damit eine Flugzeit von 5-6 Minuten.
Die gemessene Leistung beträgt bei Schwebepitch ca. 150-170 Watt.
Bei Vollpitch geht das dann hoch auf <200 Watt.
Jetzt meine zwei Fragen:
Wie kann ich die Flugzeit erhöhen?
Bringen kleinere Luftschrauben etwas oder müssen kleinere Motoren rein?
Im GPS Home Modus kommt der Copter wieder sauber zur Homeposition zurück.
Allerding bleibt er in einer höheren Flughöhe stehen, als die Home Position.
Kann man das einstellen?
Gruß
Marcel

