
Hallo Leute,
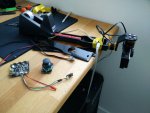
derzeit arbeite ich an dem ersten Prototypen meines GoPro Hand Gimbals.
Vorab: Habe noch nie ein Gimbal selber gebaut. Löten (auch SMD) ist eigentlich (*komme ich noch zu) kein Problem. Einfache Schaltungen, Mikrocontroller programmieren oder irgendeine Hardware flashen ist auch alles kein Problem. Soweit zu meinen "Skills".
Mein Projekt: Ich möchte mein eigens entworfenes GoPro Handheld Gimbal (und später Xiaomi Yi) bauen.





Zu dem Projekt:
- 3D Modell ist schon ganz gut vorangeschritten. Ersten Prototypen sind gedruckt (Mendel89).
- Motoren: D2208 90KV (14Pol)
- Steuerung: 1x das große STorM32 v1.31 sowie 1x Micro STorM32 Board
- Zur Steuerung soll ein Joystick verwendet werden (derzeit noch nicht angeschlossen)
- Als Stromquelle dienen später 3x IMR 18350 700mAh 3.7V Akkus (derzeit wird mit 3S Lipo getestet)
Ich habe alles zusammengeschraubt und das Storm Board geflasht und das Gimbal Configuration Tool durchlaufen lassen. Es hat auf Anhieb super funktioniert. Als nächstes hätte ich mich der Konfiguration und PIDs gewidmet. Währenddessen habe ich mir aber überlegt, dass ich das Board nicht weiter verwenden möchte, da es mir zu groß ist. Deswegen habe ich beim Chinesen meines Vertrauens das Micro Board bestellt. Während der Lieferzeit habe ich mich dem 3D Modell gewidmet.
Nun ist gestern das Storm Micro angekommen. Kurz eine kleine Litze aufgelötet und die Firmware geflasht.
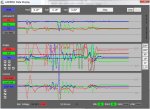
Beim verlöten der Silikonkabel habe ich nun das erste mal geschafft das Lötpad vom IMU runterzureißen und habe wahrscheinlich den Kontakt "SCL" zerstört. Daraufhin habe ich einfach das IMU Modul des großen Storm Boards an das Storm Micro gelötet. Im "Data Display" laufen beide IMUs ohne Probleme auf allen Achsen.
Daraufhin habe ich einfach das IMU Modul des großen Storm Boards an das Storm Micro gelötet. Im "Data Display" laufen beide IMUs ohne Probleme auf allen Achsen.
Danach habe ich wieder alle Motoren verbunden und wollte das Konfigurationstool starten.
Und da kommen wir zu meinem Problem(en):
Beim Schritt Wo er sich kalibriert und die Kamera eigentlich in Waage bringen soll (LEVEL) kommt es dann zu folgendem Fehler:
The gimbal could not level within reasonable time, and aborted!

Das Gimbal hat versucht über die ROLL und PITCH Achse sich zu leveln, was aber nicht mehr funktioniert.
Hier ein Video: (sorry für den Sound, mein 3D Drucker lief)
[video=youtube;E8acjdeprv4]https://www.youtube.com/watch?v=E8acjdeprv4[/video]
Nun weiß ich leider nicht genau wie ich an das Problem heran gehen muss.
Passt die IMU nicht zum Board? Testweise das IMU Kabel weg von den Motorkabeln habe ich versucht.
Ich habe versucht STEP 2 komplett zu überspringen und danach erneut zu konfigurieren.
Ich erhoffe mir durch euch und Olliw das Projekt doch noch abzuschließen zu können und mein Projekt danach mit euch zu teilen, damit es jemand nachbauen kann.
Beste Grüße,
ps915
PS:
Problem 2:
Ersteinmal nicht so wichtig, aber ich habe natürlich versucht das Gimbal mit dem großen Storm Board ans laufen zu bekommen doch auch das ist gescheitert. Allerdings daran, dass beide IMU nicht erkannt werden.
Schließe ich nur das USB Kabel an das Board (ohne externe IMU) findet er nur IMU2. Sobald ich die externe IMU anschließe wird im Datadisplay wieder nur IMU2 angezeigt. Es liefert aber die Werte vom externen IMU. Beide zusammen klappt nicht mehr. Habe das Board schon frisch geflasht, aber auch dann funktioniert es nicht.
Ist das Board nun defekt?

Konfiguration zum Storm Micro:











derzeit arbeite ich an dem ersten Prototypen meines GoPro Hand Gimbals.
Vorab: Habe noch nie ein Gimbal selber gebaut. Löten (auch SMD) ist eigentlich (*komme ich noch zu) kein Problem. Einfache Schaltungen, Mikrocontroller programmieren oder irgendeine Hardware flashen ist auch alles kein Problem. Soweit zu meinen "Skills".
Mein Projekt: Ich möchte mein eigens entworfenes GoPro Handheld Gimbal (und später Xiaomi Yi) bauen.
- 3D Modell ist schon ganz gut vorangeschritten. Ersten Prototypen sind gedruckt (Mendel89).
- Motoren: D2208 90KV (14Pol)
- Steuerung: 1x das große STorM32 v1.31 sowie 1x Micro STorM32 Board
- Zur Steuerung soll ein Joystick verwendet werden (derzeit noch nicht angeschlossen)
- Als Stromquelle dienen später 3x IMR 18350 700mAh 3.7V Akkus (derzeit wird mit 3S Lipo getestet)
Ich habe alles zusammengeschraubt und das Storm Board geflasht und das Gimbal Configuration Tool durchlaufen lassen. Es hat auf Anhieb super funktioniert. Als nächstes hätte ich mich der Konfiguration und PIDs gewidmet. Währenddessen habe ich mir aber überlegt, dass ich das Board nicht weiter verwenden möchte, da es mir zu groß ist. Deswegen habe ich beim Chinesen meines Vertrauens das Micro Board bestellt. Während der Lieferzeit habe ich mich dem 3D Modell gewidmet.
Nun ist gestern das Storm Micro angekommen. Kurz eine kleine Litze aufgelötet und die Firmware geflasht.
Beim verlöten der Silikonkabel habe ich nun das erste mal geschafft das Lötpad vom IMU runterzureißen und habe wahrscheinlich den Kontakt "SCL" zerstört.
Daraufhin habe ich einfach das IMU Modul des großen Storm Boards an das Storm Micro gelötet. Im "Data Display" laufen beide IMUs ohne Probleme auf allen Achsen.Danach habe ich wieder alle Motoren verbunden und wollte das Konfigurationstool starten.
Und da kommen wir zu meinem Problem(en):
Beim Schritt Wo er sich kalibriert und die Kamera eigentlich in Waage bringen soll (LEVEL) kommt es dann zu folgendem Fehler:
The gimbal could not level within reasonable time, and aborted!
Das Gimbal hat versucht über die ROLL und PITCH Achse sich zu leveln, was aber nicht mehr funktioniert.
Hier ein Video: (sorry für den Sound, mein 3D Drucker lief)
[video=youtube;E8acjdeprv4]https://www.youtube.com/watch?v=E8acjdeprv4[/video]
Nun weiß ich leider nicht genau wie ich an das Problem heran gehen muss.
Passt die IMU nicht zum Board? Testweise das IMU Kabel weg von den Motorkabeln habe ich versucht.
Ich habe versucht STEP 2 komplett zu überspringen und danach erneut zu konfigurieren.
Ich erhoffe mir durch euch und Olliw das Projekt doch noch abzuschließen zu können und mein Projekt danach mit euch zu teilen, damit es jemand nachbauen kann.
Beste Grüße,
ps915
PS:
Problem 2:
Ersteinmal nicht so wichtig, aber ich habe natürlich versucht das Gimbal mit dem großen Storm Board ans laufen zu bekommen doch auch das ist gescheitert. Allerdings daran, dass beide IMU nicht erkannt werden.
Schließe ich nur das USB Kabel an das Board (ohne externe IMU) findet er nur IMU2. Sobald ich die externe IMU anschließe wird im Datadisplay wieder nur IMU2 angezeigt. Es liefert aber die Werte vom externen IMU. Beide zusammen klappt nicht mehr. Habe das Board schon frisch geflasht, aber auch dann funktioniert es nicht.
Ist das Board nun defekt?
Konfiguration zum Storm Micro:
Zuletzt bearbeitet:

