
Brushless Gimbal Controller - SOFTWARE
- Themenstarter Lonestar78
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Hallo zusammen,
und hier ist nun das Testvideo von Heute.
[video=youtube;xK01qRW95qI]www.youtube.com/watch?v=xK01qRW95qI[/video]
Ein Test ob die übertragenen Vibrationen im Video noch vorhanden sind, folgt Heute Abend. Ich denke jedoch das Bild sieht schon deutlich besser aus als das letzte Mal.
Viele Grüße
Henry
und hier ist nun das Testvideo von Heute.
[video=youtube;xK01qRW95qI]www.youtube.com/watch?v=xK01qRW95qI[/video]
Ein Test ob die übertragenen Vibrationen im Video noch vorhanden sind, folgt Heute Abend. Ich denke jedoch das Bild sieht schon deutlich besser aus als das letzte Mal.
Viele Grüße
Henry
Hallo Henry,
ich denke das Video kann sich zeigen lassen...ich war die ganze zeit dabei ebenfalls Parameter einzustellen.
Ich brauche mehr kraft auf dem Roll- Motor.
Deswegen werde ich mir gleich einen neuen Motor bestellen. Kann mich nicht entscheiden welchen von beiden....preislich ist es egal da nur 17€ unterschied. Aber welchen nehme ich....weiss meint ih?
http://www.smartdrones.de/collections/motors/products/copy-of-sd-m550g2-4412-brushless-motor
oder
http://www.smartdrones.de/collections/motors/products/brushless-motors-smartmotors630
Gruß Ertan
ich denke das Video kann sich zeigen lassen...ich war die ganze zeit dabei ebenfalls Parameter einzustellen.
Ich brauche mehr kraft auf dem Roll- Motor.
Deswegen werde ich mir gleich einen neuen Motor bestellen. Kann mich nicht entscheiden welchen von beiden....preislich ist es egal da nur 17€ unterschied. Aber welchen nehme ich....weiss meint ih?
http://www.smartdrones.de/collections/motors/products/copy-of-sd-m550g2-4412-brushless-motor
oder
http://www.smartdrones.de/collections/motors/products/brushless-motors-smartmotors630
Gruß Ertan
Danke Ertan,
Wenn für dich der Preis keinen Unterschied macht, dann nimm den großen. Die Quallität ist besser und du bekommst deutlich mehr Draht drauf.
Das Ruckeln bei mir dürften nicht die PID`s sein. Ich habe unter bestimmten Bedingungen hörbare Schwingungen vom Copter und genau dann ruckelt es auch. Ich habe die Halterung aber schon umgebaut. Diese Schwingungen dürften nicht mehr auftreten. *hoffe ich*
Viele Grüße
Henry
Wenn für dich der Preis keinen Unterschied macht, dann nimm den großen. Die Quallität ist besser und du bekommst deutlich mehr Draht drauf.
Das Ruckeln bei mir dürften nicht die PID`s sein. Ich habe unter bestimmten Bedingungen hörbare Schwingungen vom Copter und genau dann ruckelt es auch. Ich habe die Halterung aber schon umgebaut. Diese Schwingungen dürften nicht mehr auftreten. *hoffe ich*
Viele Grüße
Henry
Hallo El Dentiste,
das ist eine Naza, die wobbelt von Haus aus ein wenig. ;-) Nein der Copter selbst wobbelt für eine Naza eigentlich kaum. Die AQ bekomme ich leider aus Platzgründen nicht auf den Copter, damit dürfte er etwas ruhuger in der Luft liegen. Der Punkt war wahrscheinlich das es zu wenig Luft zwischen der mit dem Copter verbundenen Halterung und der gedämpften Kamerahalterung gab. Dann schlug Carbon auf Carbon und erzeugte hörbare Vibrationen, welche auch auf die IMU übertragen wurden.
Nun ist hier etwas mehr Luft und ich hoffe, dass es nun noch ruckelfreier ist.
Viele Grüße
Henry
das ist eine Naza, die wobbelt von Haus aus ein wenig. ;-) Nein der Copter selbst wobbelt für eine Naza eigentlich kaum. Die AQ bekomme ich leider aus Platzgründen nicht auf den Copter, damit dürfte er etwas ruhuger in der Luft liegen. Der Punkt war wahrscheinlich das es zu wenig Luft zwischen der mit dem Copter verbundenen Halterung und der gedämpften Kamerahalterung gab. Dann schlug Carbon auf Carbon und erzeugte hörbare Vibrationen, welche auch auf die IMU übertragen wurden.
Nun ist hier etwas mehr Luft und ich hoffe, dass es nun noch ruckelfreier ist.
Viele Grüße
Henry
Anhänge
-
 1,2 MB Aufrufe: 17
1,2 MB Aufrufe: 17
Moin zusammen,
das Video von Henry ist doch schon super. Für einen normalen Flugstiel allemal ausreichend - und selbst bei dem hin- und hergezappel war der Ausgleich gut.
@Ertan: Mit den Motoren machst Du bestimmt nichts falsch.
Ich habe gestern auch endlich das Gimbal fertig bekommen. Roll ist auch bei mir zu schwach. Ich habe die roten 24p aus dem Russenforum von Hobbyking bestellt - und warte.
Mal schauen wie weit ich heute komme,
Olli
das Video von Henry ist doch schon super. Für einen normalen Flugstiel allemal ausreichend - und selbst bei dem hin- und hergezappel war der Ausgleich gut.
@Ertan: Mit den Motoren machst Du bestimmt nichts falsch.
Ich habe gestern auch endlich das Gimbal fertig bekommen. Roll ist auch bei mir zu schwach. Ich habe die roten 24p aus dem Russenforum von Hobbyking bestellt - und warte.
Mal schauen wie weit ich heute komme,
Olli
Hi Ertan,
na klar - muss nur viel arbeiten
Die Bilder stelle ich nachher mal rein...
Die schönen Motörchen sind das:
http://www.hobbyking.com/hobbyking/store/__25555__AX_4008Q_620KV_Brushless_Quadcopter_Motor.html
Bin mal gespannt,
Olli
na klar - muss nur viel arbeiten
Die Bilder stelle ich nachher mal rein...
Die schönen Motörchen sind das:
http://www.hobbyking.com/hobbyking/store/__25555__AX_4008Q_620KV_Brushless_Quadcopter_Motor.html
Bin mal gespannt,
Olli
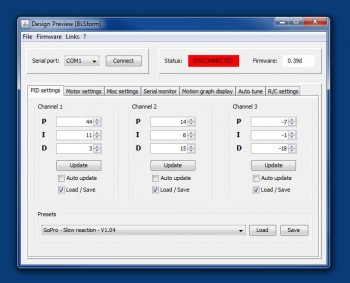
I am currently working on the serial protocol. That is required by the software above to work. So be patient ;-)
Will look like this:
S_PITCH_PID 1230 22 234
This sets the P, I and D Values during runtime in memory.
S_ for "Set"
If you want to save to eeprom, use: W_EEPROM
Will be available in 040, which is not ready yet.
Will look like this:
S_PITCH_PID 1230 22 234
This sets the P, I and D Values during runtime in memory.
S_ for "Set"
If you want to save to eeprom, use: W_EEPROM
Will be available in 040, which is not ready yet.
Zuletzt bearbeitet:
Habe ich da etwa 040 gelesen ?! - ich freue mich und bin gespannt ;-)
Die 039 war soeben trotz ein etwas Ruckeln schon im Produktiveinsatz *lach*
Wer es sehen möchte - ein Video findet ihr hier: http://www.rcmovie.de/video/7f8ce0c77128c51d1f75/New-Gimbal-Fast-First-Test
Auch wenn ich mich auf engstem Raum bewegt habe, brauchte ich mich beim Fliegen kaum bremsen. Ein Restruckeln bleibt, aber das sollte man auch noch hinbekommen.
Viele Grüße
Henry
Die 039 war soeben trotz ein etwas Ruckeln schon im Produktiveinsatz *lach*
Wer es sehen möchte - ein Video findet ihr hier: http://www.rcmovie.de/video/7f8ce0c77128c51d1f75/New-Gimbal-Fast-First-Test
Auch wenn ich mich auf engstem Raum bewegt habe, brauchte ich mich beim Fliegen kaum bremsen. Ein Restruckeln bleibt, aber das sollte man auch noch hinbekommen.
Viele Grüße
Henry
Zuletzt bearbeitet:
Habe ich da etwa 040 gelesen ?! - ich freue mich und bin gespannt ;-)
Die 039 war soeben trotz ein etwas Ruckeln schon im Produktiveinsatz *lach*
Wer es sehen möchte - ein Video findet ihr hier: http://www.rcmovie.de/video/7f8ce0c77128c51d1f75/New-Gimbal-Fast-First-Test
Auch wenn ich mich auf engstem Raum bewegt habe, brauchte ich mich beim Fliegen kaum bremsen. Ein Restruckeln bleibt, aber das sollte man auch noch hinbekommen.
Viele Grüße
Henry
Die 039 war soeben trotz ein etwas Ruckeln schon im Produktiveinsatz *lach*
Wer es sehen möchte - ein Video findet ihr hier: http://www.rcmovie.de/video/7f8ce0c77128c51d1f75/New-Gimbal-Fast-First-Test
Auch wenn ich mich auf engstem Raum bewegt habe, brauchte ich mich beim Fliegen kaum bremsen. Ein Restruckeln bleibt, aber das sollte man auch noch hinbekommen.
Viele Grüße
Henry
Durch unsere tollen Entwicklerkollegen ist dieses Projekt eines der besten bei denen ich bis jetzt teilhaben konnte !
Fritz
Hi, ich bräuchte mal etwas Support von einem Profi.
Ich habe gestern nacht vergeblich versucht den Controller zum Laufen zu bringen. Ist das Set von Ludwig (4404 Motoren), ich habe dann diese IMU angeschlossen:
http://flyduino.net/MPU6050-Break-Out-onboard-33V-reg
Dabei habe ich mich an bisher bekannten Hinweise zur Verdrahtung gehalten, VCC, GND... stimmt soweit alles. Verpolung kann ich ausschließen. Komischerweise rastet dann nur ein Motor ein, der andere scheint einfach keinen Strom zu bekommen.
Es aber auch bei dem einen Motor keine auch nur kleine Reaktionen auf Bewegung der IMU zu merken.
Muss ich in der config irgendwas ändern oder wird diese IMU problemlos erkannt?
Kann ich mit einem Multimeter irgendetwas durchmessen, ob die IMU funktioniert?
Danke!
Ich habe gestern nacht vergeblich versucht den Controller zum Laufen zu bringen. Ist das Set von Ludwig (4404 Motoren), ich habe dann diese IMU angeschlossen:
http://flyduino.net/MPU6050-Break-Out-onboard-33V-reg
Dabei habe ich mich an bisher bekannten Hinweise zur Verdrahtung gehalten, VCC, GND... stimmt soweit alles. Verpolung kann ich ausschließen. Komischerweise rastet dann nur ein Motor ein, der andere scheint einfach keinen Strom zu bekommen.
Es aber auch bei dem einen Motor keine auch nur kleine Reaktionen auf Bewegung der IMU zu merken.
Muss ich in der config irgendwas ändern oder wird diese IMU problemlos erkannt?
Kann ich mit einem Multimeter irgendetwas durchmessen, ob die IMU funktioniert?
Danke!
- Status
- Nicht offen für weitere Antworten.

